Baixar para ler offline








![2
Segundo [1] Altshuller (2007), Nicola Tesla, que trabalhou com Thomas Edison,
descreve o processo criativo do inventor da primeira lâmpada elétrica, na forma que o autor
deste trabalho toma a liberdade de traduzir:
“Se Edison tivesse a tarefa de encontrar uma agulha no palheiro, ele
não perderia tempo determinando a mais provável localização dela. Ele
imediatamente, com a diligência de uma abelha, começaria pegando graveto
após graveto até ter encontrado seu objeto de procura. (...)”.
Figura 1: Diagrama do método de Tentativa-e-Erro
Fonte: Elaborada pelo autor
“No início foi muito triste o ver trabalhar, sabendo que apenas um pouco de
conhecimento teórico e alguns cálculos penderiam tê-lo economizado pelo
menos 30% de seu tempo”.
O segundo método é uma versão melhorada pelo psicologista A. Osborn em 1953 do
método de Tentativa-e-erro, conhecido como Brainstorming ([1] Altshuller, 2007). Algumas](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-14-320.jpg)


![5
2 ANÁLISE DO PROBLEMA EM ESTUDO
Manutenção industrial, de maneira geral, é um dos setores com menos recursos
dentro das empresas. [20] Marco Palleta descreve em um artigo para o site Pragma Brasil que:
"É interessante constatar que muitos gestores ainda consideram como
perfumaria a atividade de manutenção industrial, e somente quando as
máquinas, equipamentos e instalações falham ou ocorrem paradas causadas
por defeitos, é que acordam, correm, cobram...”.
Com isso, a inspeção das instalações que se situam em espaços confinados e áreas de
difícil acesso são feitas somente de maneira visual, quando são realizadas.
Partindo de uma análise macroscópica dos transtornos da manutenção, aqui será
apresentada uma proposta de solução de um problema crônico deda gestão de integridade das
instalações industriais.
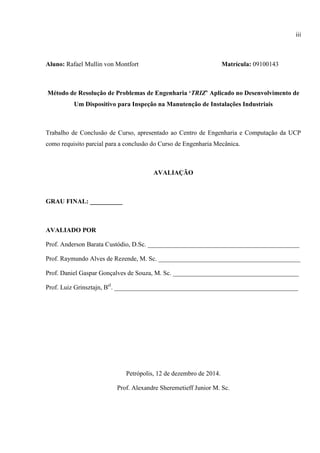
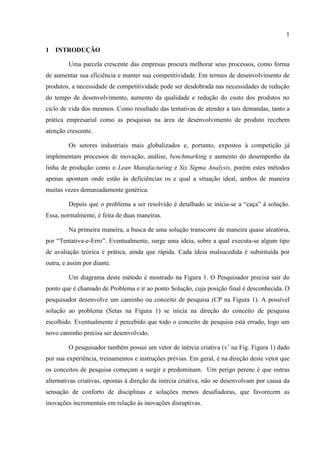
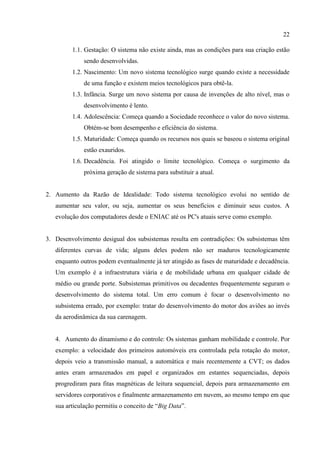
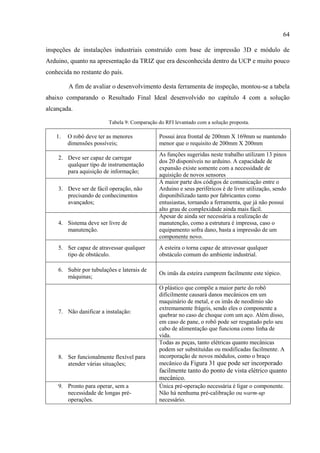
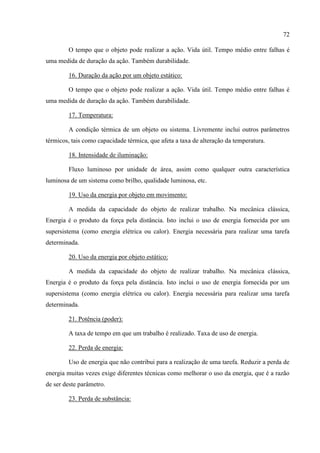
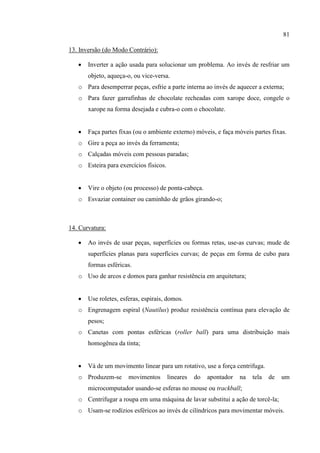
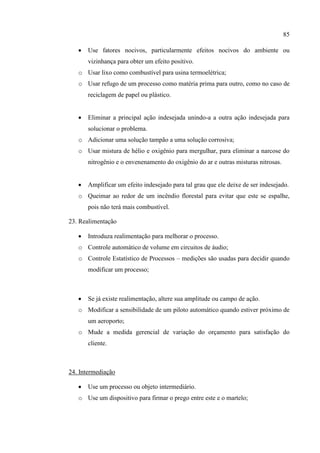
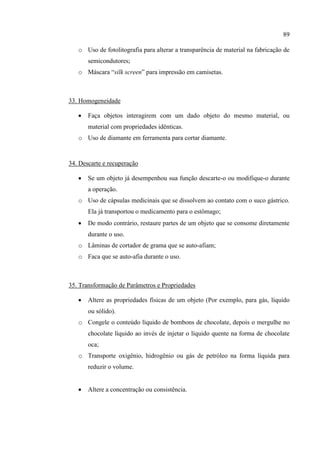
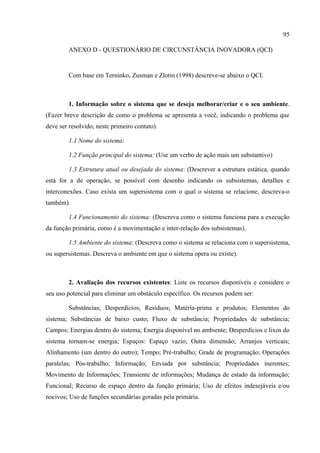
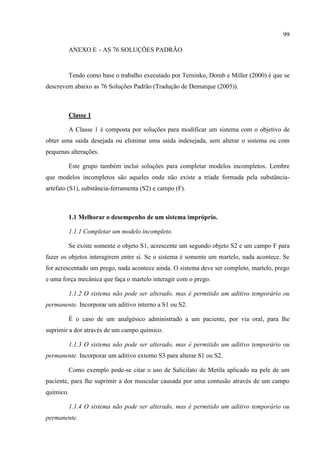
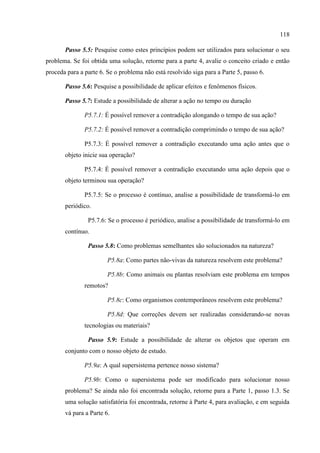
Instalações industriais são frequentemente objetos de constante negligência do setor
de manutenção. Um agravador é recorrência de situações de acessibilidade conturbada. Toma-
se como exemplo o prédio de Eletroacústica do INMETRO. Ele possui uma câmara
reverberante suspensa por molas mecânicas e uma cama anecoica suspensa por amortecedores
pneumáticos (Figura 3). Estes recursos têm o objetivo de evitar transmissão de vibrações
provenientes do solo para dentro da câmara. Como o dreno da linha de ar comprimido deve
ser instalado em seu ponto de menor potencial gravitacional, inspeções no subsolo da câmara
anecoica devem ser realizadas frequentemente.
Figura 3: Amortecedores Pneumáticos sob a câmara anecoica do INMETRO.
Fonte: Elaborada pelo autor
Outro exemplo é o interior de dutos de ar condicionado que a [4] Lei Estadual 4.192
de 01/10/2003 obriga a limpeza do sistema de ar condicionado anualmente. Pela Figura 4 e
Figura 5, podemos ver que isto não é uma tarefa fácil para o operário do setor de manutenção.](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-17-320.jpg)


![8
3 MÉTODO TRIZ
O tеория решения изобретательских задач ou em nosso alfabeto teoriya
resheniya izobretatelskikh zadatch, que pode ser traduzido para teoria de resolução inventiva
de problemas, é mais conhecido pelo acrônimo TRIZ. Ela trabalha através de ferramentas, que
se baseiam em características e contradições das peculiaridades do produto, para implementar
melhorias que podem gera um produto ou processo inteiramente novo.
[19] Mazur (1995) declara que Altshuller propôs que um método inventivo deveria
satisfazer as seguintes condições:
1. Ser sistemática, um procedimento passo-a-passo;
2. Ser um guia através do vasto campo de soluções, conduzindo para uma
solução ideal;
3. Capaz de ser reproduzida de modo confiável e independente de ferramentas
psicológicas;
4. Capaz de acessar ao corpo do conhecimento inventivo;
5. Capar de acrescentar ao corpo do conhecimento inventivo;
6. Ser suficiente familiar aos inventores, seguindo uma abordagem genérica
para a solução dose problemas.
O método TRIZ é um método de “alto nível” em hierarquia. Se você deseja aumentar
a eficiência de um motor, ele não dará soluções como “Mude o óleo lubrificante de SAE 40
para SAE 50”. O método coordena o raciocínio e guia a uma resposta. Otimizando o
conhecimento do dado sistema, para focar em uma solução viável. Uma das soluções que ele
pode sugerir para o problema supracitado é o Princípio Inventivo 35: “Mudança de
parâmetros e propriedades”. Porém, é necessário um engenheiro traduza esta solução genérica
para um resultado prático.
Essa aplicação se fundamenta na lógica de resolução de problemas proposta pela
TRIZ. Altshuller percebeu que inventores russos desenvolviam suas invenções de maneira
caótica e sem nenhuma metodologia. A fim de organizar este processo criativo, ele partiu da
pesquisa de duzentas mil patentes dentre as quais destacou quarenta mil que considerou
inventiva. Essas patentes foram à base da TRIZ.
Com esta análise, Altshuller concluiu que:
Os sistemas técnicos evoluem, seguindo determinados padrões;
As soluções encontradas podem ser generalizadas;](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-20-320.jpg)
![9
As invenções mais criativas são aquelas que resolveram algum tipo de
contradição.
As ferramentas do método TRIZ apresentadas por [1] Altshuller em seu livro
The Innovation Algorithm de 1973 são:
O Algoritmo de Solução de Problemas (ARIZ)
Os 40 Princípios Inventivos e os 39 Parâmetros de Engenharia
A Matriz de Contradições
Porém ao longo dos anos, Altshuller, em conjunto com a comunidade que se
formou com a utilização da TRIZ, desenvolveu algumas ferramentas de extrema utilidade
como:
As 76 Soluções Padrão e análise Substância-Campo
Padrões da Evolução Tecnológica
Questionário de Circunstância Inovadora
3.1 CARACTERÍSTICAS FUNDAMENTAIS DA TRIZ
Empregando metalinguagem, Altshuller particulariza o sentido de alguns conceitos
para serem utilizados dentro da TRIZ. Toda a utilização do método se baseia no conhecimento
e entendimento pleno destes conceitos. Serão apresentadas neste trabalho apenas as três
características mais básicas da metodologia.
3.1.1 Problema inventivo
Segundo [1] Altshuller, a todo o momento fabricantes levantam novos problemas a
serem solucionados. Todos os dias engenheiros, projetistas, técnicos e mecânicos resolvem
várias tarefas técnicas. Na maioria do tempo, essas tarefas podem ser resolvidas de maneira
convencional. Regularmente problemas que necessitam de algum elemento de criatividade
surgem e muito da criatividade reside em encontrar algo já conhecido dentro da indústria e
adaptá-la para uma circunstância específica. Em outras palavras, achar a chave que melhor se
encaixa na fechadura e ajustá-la para abrir a tranca.
Um problema inventivo é aquele onde tal chave “que melhor se encaixa na
fechadura” não existe.](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-21-320.jpg)
![10
Portando, segundo [10] Demarque (2005), o problema inventivo é aquele aparenta
não haver meio conhecido para solucioná-lo, que está predisposto a Inércia Psicológica e que
envolve uma ou mais contradições.
3.1.2 Contradição
Como mencionado acima, um princípio básico da TRIZ é que um problema
inventivo é constituído de contradições. Portanto, se não há contradições, não há problema.
Esta afirmação aparentemente extrema de [12] Domb (1997) forma a base para os métodos de
resolução de problemas da TRIZ.
TRIZ define dois tipos de contradições: Físicas e Técnicas. Estes rótulos são
relíquias das primeiras traduções do russo de artigos sobre a Teoria e devem ser tidos como
referência, nenhuma contradição é mais “Física” que outra.
São chamadas de contradições técnicas são quando o estado desejado não pode ser
atingido, pois algo no sistema o impede. Em outras palavras, quando algo melhora outra coisa
piora. Exemplos clássicos deste tipo de contradição incluem:
A relação entre o aumento resistência física de um equipamento (bom) com o
aumento de seu peso (ruim);
A maior potência de um produto (bom) com o aumento do consumo de
energia (ruim).
Contradições físicas são situações em que um objeto possui requerimentos
contraditórios ou opostos como:
Programas de computador devem ser fáceis de usar, mas devem desempenhar
funções complexas e possuir opções avançadas;
A frenagem de carros deve ser instantânea para evitar colisões e gradual para
não ferir o motorista;
Estradas devem ser largas para comportar maior fluxo de veículos e estreitas
para causar menos impacto em construções adjacentes.](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-22-320.jpg)
![11
3.1.3 Idealidade ou Resultado Final Ideal (RFI)
[1] Altshuller compara mitologia grega ao desenvolvimento de um dispositivo.
Quando um poderoso golpe de machado racha o crânio do Deus Zeus, surge a Deusa Atena
com sua lança e escudo diante dos outros Deuses do Olimpo, ilesa e em completa vestimenta
ornada. Novos dispositivos, porém, não surgem da cabeça de um inventor completas com suas
“vestimentas ornadas”. Justamente o oposto, elas surgem “fracas” e vagarosamente ganham
robustez incorporando diversas outras ideias, conceitos e invenções.
A Idealidade é atingida quando não há mais contradições a serem resolvidas no
dispositivo: ele é infinitamente simples e eficiente. Seguindo esta linha de raciocínio, [15]
Hipple (1997) define o resultado final ideal como “Algo que performa sua função e não
existe”, ou seja, não há custos ou efeitos negativos. Para que tal estado seja alcançado, deve-se
mesmo questionar se o dispositivo realmente é o objetivo final do desenvolvimento, porque
possivelmente ele é apenas um dos meios para atingir um resultado desejado[1].
3.2 FERRAMENTAS DA TRIZ
3.2.1 O Algoritmo Para Solução De Problemas (ARIZ)
Conhecido pelo acrônimo do russo para Algoritmo para resolução inventiva de
problemas, o ARIZ é o centro do método TRIZ.
Desde sua primeira publicação em 1956 com o nome de ARIZ- 56, ele foi atualizado
diversas vezes gerando as versões ARIZ-59, ARIZ-61, ARIZ-64, ARIZ-65, ARIZ-68, ARIZ-
71, ARIZ-75, ARIZ-77, ARIZ-82(A, B e C) e ARIZ-85(A, B e C). A versão ARIZ-85C foi a
última publicada sobre a supervisão de Altshuller.
O ARIZ traz uma série de passos bem definidos que levam o pesquisador em direção
à solução do problema.
A ARIZ-71 pode ser encontrada no ANEXO G e a ARIZ-85C no ANEXO H. Por ser
de fácil aplicação e contar pouco com outras ferramentas, a ARIZ-71 tem muita utilidade da
resolução de problemas corriqueiros. Não só de temas ligados à engenharia, mas também de
assuntos como gerência de pessoal e administração. Por outro lado, a ARIZ-85C, sendo a
versão mais amplamente adotada do algoritmo e com passos mais bem definidos e](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-23-320.jpg)
![13
3.2.2 Os 40 Princípios Inventivos E Os 39 Parâmetros De Engenharia
Segundo [6] Carvalho e Black (2001), os princípios inventivos são heurísticos, isto é:
mais baseados em regras simples e gerais que em processos sofisticados e especializados, de
possíveis soluções para um determinado problema. Estes princípios surgiram a partir da
identificação de padrões, da ordenação e da generalização de soluções usadas em diferentes
áreas. Os princípios inventivos, tal como foram apresentados, não representavam um sistema.
A numeração que lhes foi dada por Altshuller apenas indica a ordem em que eles foram
acrescentados à TRIZ ([23] Savranski, 2000).
É necessário enfatizar que cada princípio recomendado na tabela é formulado de
maneira genérica. Eles são como roupas de fabricação em massa que devem ser ajustadas para
vestir corretamente cada problema de maneira específica. Por exemplo, se a tabela recomenda
o Princípio 01 (segmentação), apenas significa que a solução é de alguma forma conectada
com a divisão do objeto, do sistema, do efeito ou do problema em partes espaçadas no tempo
ou no espaço ou distribuídas entre mecanismos de ação, entre apoios, etc., remediando
contradições que decorrem da concomitância ou da unicidade. A tabela de nenhuma maneira
dispensa o inventor da necessidade de pensar. ([1] Altshuller, 2007).
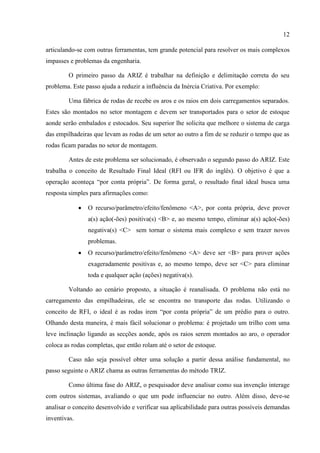
Na Tabela 1 são listados os 40 princípios inventivos.
Tabela 1: 40 Princípios Inventivos
1 Segmentação ou fragmentação 21 Aceleração
2 Extração 22 Transformação de prejuízo em lucro
3 Qualidade Local 23 Retroalimentação
4 Assimetria 24 Mediação
5 Consolidação 25 Autosserviço
6 Universalidade 26 Cópia
7 Alinhamento 27 Uso e descarte
8 Contrapeso 28 Substituição de meios mecânicos
9 Compensação prévia 29 Construção pneumática ou hidráulica
10 Ação prévia 30 Uso de filmes finos e membranas flexíveis
11 Amortecimento prévio 31 Uso de materiais porosos](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-25-320.jpg)
![14
12 Equipotencialidade 32 Mudança de cor
13 Inversão 33 Homogeneização
14 Esfericidade 34 Descarte e regeneração
15 Dinamização propriedades 35 Mudança de parâmetros e propriedades
16 Ação parcial ou excessiva 36 Mudança de fase
17 Mudança para uma nova dimensão 37 Expansão térmica
18 Vibração mecânica 38 Uso de oxidantes fortes
19 Ação periódica 39 Uso de atmosferas inertes
20 Continuidade da ação útil 40 Uso de materiais compostos
Fonte: Elaborada pelo autor.
Como descrito por [10] Demarque (2005), se problemas inventivos são aqueles que
contêm conflitos, descrever esses conflitos torna-se muito importante. Dois engenheiros
estudando o mesmo problema podem descrevê-lo usando palavras diferentes, e ambos estão
corretos. Portanto, universalizar a linguagem técnica que descreve os parâmetros e
características de um sistema torna-se também importante, porque conflitos podem acontecem
entre parâmetros e características.
Altshuller cria com bastante perspicácia os 39 parâmetros de engenharia (descritos na
Tabela 2) que descrevem de maneira geral os entraves encontrados por pesquisadores.
Os 40 Princípios inventivos podem ser utilizados de maneira independente como
uma variação do método de Tentativa-e-Erro. Porém normalmente se é utilizado em conjunto
com os 39 Parâmetros de Engenharia através da Matriz de Contradição. Exemplos desta
aplicação serão encontrados na próxima subseção
Tabela 2: Os 39 Parâmetros de engenharia
01 Peso do objeto em movimento 21 Potência (poder).
02 Peso do objeto estático 22 Perda de energia.
03 Comprimento do objeto em movimento 23 Perda de substância.
04 Comprimento do objeto estático 24 Perda de informação.](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-26-320.jpg)

![18
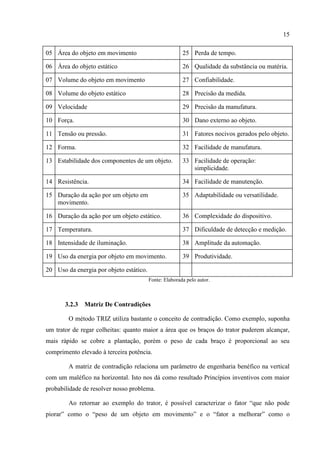
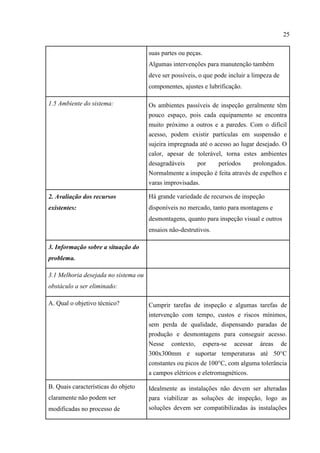
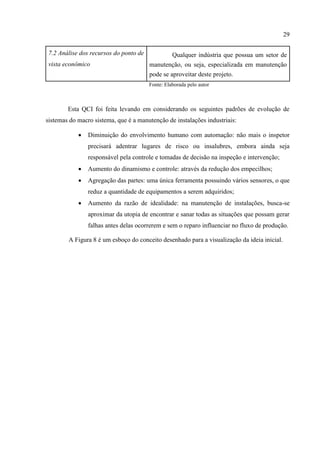
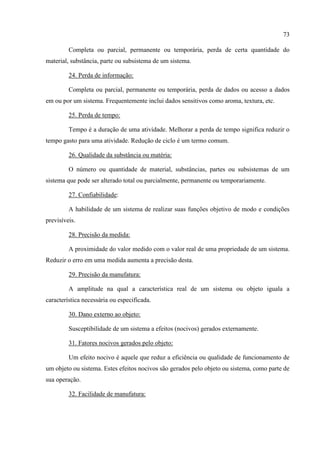
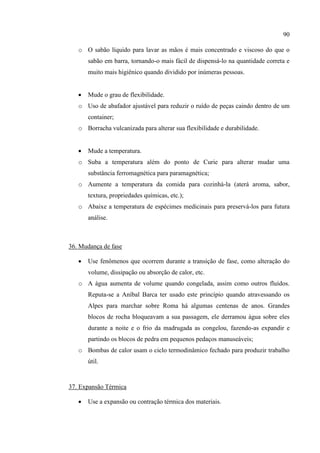
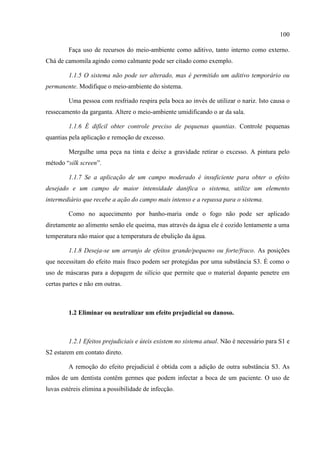
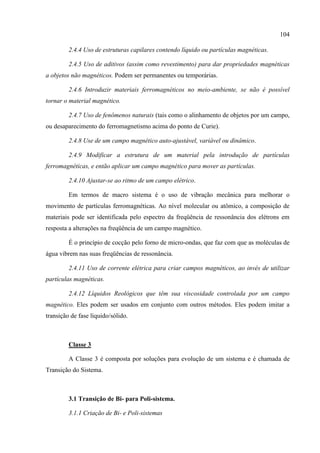
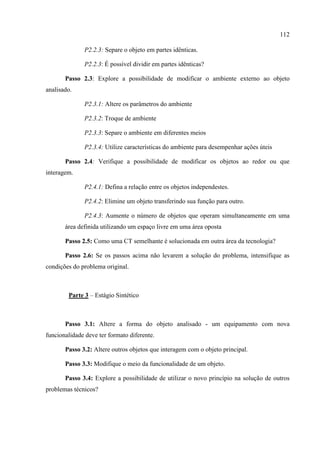
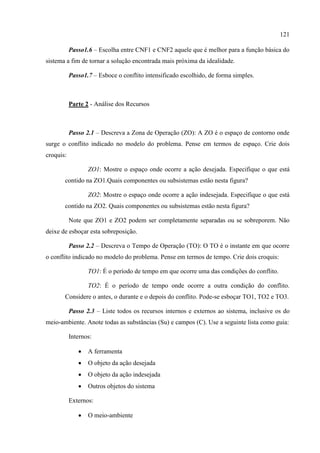
Tabela 4: Trecho da matriz de contradição 33 X 35
Fonte: Elaborada pelo autor
3.2.4 Recurso Substância-Campo (Su-C)
Segundo [23] Savransky (2000), recursos têm papel importante na solução de
problemas que estão próximos a um Resultado Final Ideal. Qualquer sistema que ainda não
atingiu idealidade deve ter algum recurso de substância ou campo disponível.
São citados como recursos:
Substâncias - qualquer material compondo ou produzindo uma função e seu
ambiente
Campos ou energias - qualquer fluxo de energia ou campo que existem ou são
produzidos no sistema ou ambiente ou que possam substituir subsistemas.
Recursos do ambiente ou naturais - qualquer substância ou Campo que existe
no ambiente ao redor do sistema;
Recursos temporais - intervalo de tempo antes do início, após o final e entre
ciclos do sistema;
30 31 32 33 34 35 36
Não pode
Piorar
Fator
a melhorar
Fatoresnocivosafetanto
oobjeto
Fatoresnocivosauto-
geradospeloobjeto
Facilidadedefabricação
Facilidadedeoperação
Facilidadedereparo
Adaptabilidadeou
versatilidade
Complexidadedo
dispositivo
31
Fatores nocivos auto-
gerados pelo objeto
+
19, 1,
31
32 Facilidade de fabricação 24, 2 +
2, 5,
13, 16
35, 1,
11, 9
2, 13,
15
27, 26,
1
33 Facilidade de operação
2, 25,
28, 39
2, 5, 12 +
12, 26,
1, 32
15, 34,
1, 16
32, 26,
12, 17
34 Facilidade de reparo
35, 10,
2, 16
1, 35,
11, 10
1, 12,
26, 15
+
7, 1, 4,
16
35, 1,
13, 11
35
Adaptabilidade ou
versatilidade
35, 11,
32, 31
1, 13,
31
15, 34,
1, 16
1, 16,
7, 4
+
15, 29,
37, 28
36
Complexidade do
dispositivo
22, 19,
29, 40
19, 1
27, 26,
1, 13
27, 9,
26, 24
1, 13
29, 15,
28, 37
+
37
Dificuldade de detectar
ou medir
22, 19,
29, 28
2, 21
5, 28,
11, 29
2, 5 12, 26 1, 15
15, 10,
37, 28
38 Extensão da automação 2, 33 2
1, 26,
13
1, 12,
34, 3
1, 35,
13
27, 4,
1, 35
15, 24,
10](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-30-320.jpg)
![19
Recursos espaciais - posições, localizações e ordem dos subsistemas, do
sistema em si e super-sistemas.
Recursos do sistema - novas técnicas e propriedades do sistema ou em
conjunto com sistemas independentes em um novo super-sistema
Recursos de informação - qualquer sinal que existe ou pode ser produzido no
sistema;
Recursos funcionais - a capacidade do sistema ou de seu ambiente de
produzir funções auxiliárias ou secundárias.
Segundo [21] Petrov (2010), a análise estatística das soluções técnicas demonstra
que, para aumentar a eficiência dos sistemas de técnicas, a estrutura funcional deve ser
determinada. O modelo de tal estrutura é chamado de Vepol. Vepol é o sistema mínimo de
engenharia, constituído por dois recursos de substância e o campo de energia que descreve sua
interação.
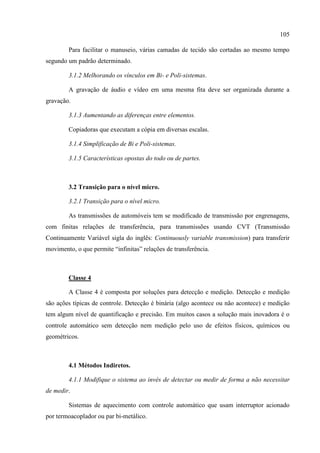
Campos em um modelo de Recursos Substância-Campo (RSu-C) utilizam a
simbologia descrita na Figura 6.
Figura 6: Simbologia para análise Su-F
Fonte: Elaborada pelo autor
E um exemplo de Vepol se encontra na Figura 7 que descreve o sistema de uma
pessoa sentada em uma cadeira.](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-31-320.jpg)
![20
Figura 7: Interação Su-f de uma pessoa sentada em uma cadeira
Fonte: Elaborada pelo autor
3.2.5 As 70 Soluções Padrões.
Altshuller, em seu livro “Pequenos mundos enormes: Normas para a solução de
problemas criativos” [2] diz que
“desde o início, o desenvolvimento da TRIZ foi clara - você deve ter um
forte banco de informação, incluindo os primeiros métodos padrão de
eliminar contradições técnicas. O trabalho sobre a sua criação foi realizada
por muitos anos, e a revisão de mais de 40 mil invenções identificou 40
técnicas padrão.”
[25] Terninko, Domb, e Miller (2000) dizem que as "76 soluções padrão" da TRIZ
foram compilados por G. S. Altshuller e seus associados entre 1975 e 1985. Elas estão
agrupadas em cinco grandes classes de acordo com seus objetivos:
Classe 1: Melhorar o sistema com pouca ou nenhuma alteração (13 soluções
padrão);
Classe 2: Melhorar o sistema, admitindo alterações no sistema (23 soluções
padrão);
Classe 3: Transições do sistema (6 soluções padrão);
Classe 4: Detecção e medição (17 soluções padrão);
Classe 5: Estratégias de simplificação e melhoria (17 soluções padrão).
Todas as soluções padrões, com exemplos, podem ser encontradas no ANEXO E.
Estas soluções padrões oferecem soluções padrões a problemas frequentemente encontrados e](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-32-320.jpg)
![21
são uma excelente ferramenta para ser utilizada como primeiro passo na solução de um
problema inventivo.
3.2.6 Padrões de Evolução Tecnológica
Logo no período inicial do desenvolvimento da TRIZ, Altshuller concluiu que
sistemas não se desenvolvem de maneira aleatória. Sistemas possuem características de
evolução compartilhadas, mesmo em áreas não correlacionadas. Ele enumerou oito dessas
características (Tabela 5) e as deu o nome de Padrões de Evolução tecnológica.
O [16] Prof. Dr. Noel Leon (2006) conclui em seu artigo que
“os padrões de evolução de sistemas descritos por Altshuller são a melhor
base para o desenvolvimento de novos métodos e ferramentas que auxiliam
na previsão e alcançar o próximo estágio na evolução dos sistemas
tecnológicos.”.
Tabela 5: Padrões de evolução tecnológica Formulados por Altshuller
#1
A Tecnologia segue o ciclo biológico de evolução, com Gestação,
Nascimento, Infância, Adolescência, Maturidade e Decadência.
#2 Aumento da Razão de Idealidade
#3 Desenvolvimento desigual dos subsistemas resulta em contradições.
#4 Aumento do dinamismo e do controle.
#5 Aumento da complexidade, seguido pela integração das partes.
#6 Agregação e desagregação das partes.
#7 Transição do macro sistema para o micro sistema com o uso de campos.
#8 Diminuição do envolvimento humano com automação.
Fonte: Elaborada pelo autor
[10] Demarque (2005) descreve os padrões de evolução tecnológica da seguinte
maneira:
1. A Tecnologia segue o ciclo biológico de evolução, com Gestação, Nascimento,
Infância, Adolescência, Maturidade e Decadência.](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-33-320.jpg)
![24
4 PROPOSTA PARA SOLUCIONAR O SISTEMA DE INSPEÇÃO DE
INSTALAÇÕES INDUSTRIAIS
Segundo [1] Altshuller (2000), pesquisas e a observação direta de processo criativo
mostram que na maioria dos casos o pesquisador tenta resolver o problema sem uma
cuidadosa análise de suas condições. Após cada tentativa má sucedida, o pesquisador retorna
ao problema, esclarece um detalhe e faz outra tentativa de solução.
A ARIZ leva em consideração esse erro generalizado em sua primeira parte de
formulação do problema. Porém esta parte é aplicável quando já existe um problema
específico para resolução. Para facilitar a coleta de dados e a definição de um problema [26]
Terninko, Zusman e Zlotin (1998) desenvolveram o Questionário de Circunstância Inovadora
(QCI) que pode se encontra completo no Anexo D.
Apesar de não ser uma ferramenta da TRIZ Clássica, ela foi adotada como uma pré-
análise do problema de inspeção de instalações industriais e se encontra abaixo na Tabela 6.
Tabela 6: QCI do Problema de Manutenção de Instalações Industriais
1. Informação sobre o sistema que
se deseja melhorar/criar e o seu
ambiente.
1.1 Nome do sistema: Inspeção de instalações industriais com foco na
avaliação de integridade e manutenção.
1.2 Função principal do sistema: Inspecionar instalações industriais, particularmente
em áreas de mais difícil acessibilidade.
1.3 Estrutura atual ou desejada do
sistema:
A instalação e sua operacionalidade não devem
sofrer interferência (evitar desmontagens e tempo
parado).
Todos os defeitos ou perigos devem ser detectados
pela inspeção.
Os inspetores não devem estar sujeitos a riscos
físicos, psicológicos ou ergonômicos.
1.4 Funcionamento do sistema: Periodicamente os operadores devem inspecionar a
instalação que idealmente se encontra em operação e,
por meio da solução ideal, verificar a condição de](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-36-320.jpg)

![30
Figura 8: Esboço do conceito inicial.
Fonte: Elaborada pelo autor
É sugerido um conceito de pesquisa adequadamente caracterizado e o esboço de uma
ideia a ser colocado em prática. Porém para chegar mais próximo à idealidade, é necessária
uma delimitação melhor de alguns subsistemas. [7] Care e Mann (2001) mencionam que,
apesar da TRIZ oferecer bons métodos para a solução de problemas e desenvolvimento de
produtos, ela não sugere maneiras de demonstrar e visualizar esta procura.
Para a melhor visualização de todos os subsistemas envolvidos e sua hierarquia, é
empregada a técnica criada por Tony Buzan chamada de MindMaps, através da ferramenta
MindMeister.
MindMaps são uma forma coesa de demonstrar ideias, informações e suas
associações. MindMaps tem ajudado na organização de listas agendas e “Brainstorming”
desde a década de 1980.
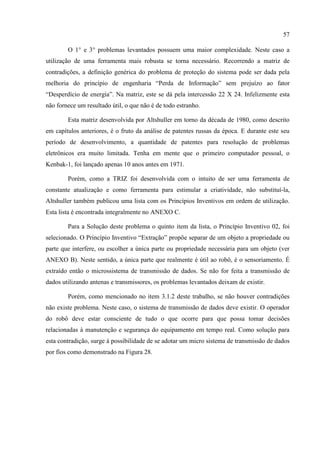
Esta aplicação pode ser vista na Figura 9 e na Figura 10 onde o centro da página é o
conceito central. Ao encaminhar-se para as bordas, crescem, como ramificações de uma
árvore, todos os conceitos que suportam e fundamentam a ideia central. No caso da inspeção](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-42-320.jpg)


![33
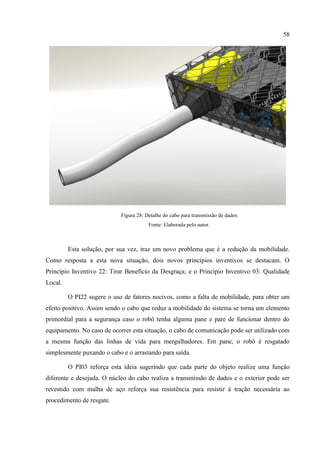
4.1.1 Arduino
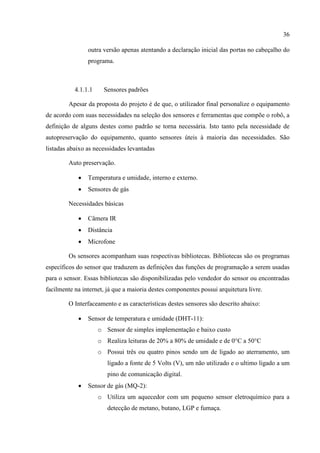
O Arduino possui várias versões que se diferenciam entre principalmente entre suas
portas, memória interna e processador. O modelo adotado é o Arduino Uno R3 (Figura 11)
por ser um modelo mediano de alta aceitação que oferece portas de comunicação suficientes
para o projeto além de possuir dimensões compatíveis às necessidades.
Figura 11: Arduino adquirido para o projeto.
Fonte: Elaborada pelo autor.
Com base em [8] Coulouris (2014) e [3] Arduino SA (2014) pode-se descrever o
Arduino como sendo uma placa microcontroladora baseada no microcontrolador ATMega328
e possuindo as seguintes características:
14 pinos de comunicação digital que podem ser utilizados tanto para entrada
de dados como saída,
o Dos quais seis podem ser utilizados como saída para modulação por
largura de pulso (PWM);
seis pinos de entrada de dados analógica;
Um ressonador de cerâmica de 16 MHz;
Uma porta de comunicação e alimentação USB-B;
Um conector de alimentação 12 v;](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-45-320.jpg)


![38
Este modelo de joystick possui cinco pinos. Um para o terra, um para entrada de 5V,
dois de resposta analógica que são a resposta do posicionamento do manche em seus dois
eixos e um para saída digital que indica o pressionamento do botão.
Como todo o circuito trabalha com corrente contínua, há duas maneiras de realizar o
controle de velocidade dos motores. O primeiro é a ligação direta na saída do potenciômetro
que fará o controle de corrente elétrica para o motor. A desvantagem desta opção é que o
torque do motor reduz com a redução da corrente elétrica devido à resistência do
potenciômetro.
O segundo método requer mais trabalho, porém mantem o torque praticamente
constante independente da velocidade do motor. A leitura da corrente modificada pelo
potenciômetro é feita pelo Arduino. Esta informação é transformada em porcentagem que será
relacionada à velocidade do motor através de um algoritmo de modulação por largura de
pulso (PWM). O princípio do PWM é emitir pulsos que duram microssegundos regulando o
tempo em que o motor fica ligado. Como este chaveamento ligado-desligado ocorre à altas
frequências, não há vibração mecânica resultante e o torque do motor se mantem o mesmo
apesar da variação em sua velocidade.
4.1.2 Impressora 3D
Também conhecida como Prototipagem Rápida, a impressão em 3D é feita a partir
de um sistema de posicionamento em três eixos e, normalmente, uma cabeça extrusora que
realiza a construção fatia-a-fatia de peças.
Segundo [17] Maia (2013) as etapas que culminam na impressão de um modelo
físico começam com um desenho digital (modelo em desenho assistido por computador
[CAD], imagem tomográfica, imagem obtida com scanner de superfície 3D) e é transformado
em um arquivo STL (estereolitografia, sigla do inglês stereolithography) que aproxima a
superfície do CAD através de uma malha triangular. A seguir, esse arquivo é transferido para
o programa da impressora, onde é posicionado dentro do volume virtual que simula o volume
físico de construção. Após a orientação neste volume, a peça é fatiada para posterior
reprodução física destas fatias uma a uma. Terminada a impressão as peças são retiradas da
impressora para remoção do material de suporte de construção.
A Impressão 3D é um dos mais recentes processos de fabricação e há diversas
empresas o desenvolvendo. Assim, apesar do processo poder ser descrito genericamente como](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-50-320.jpg)

![41
O filamento proposto e que atende as especificações do projeto é o ABS de 1.75mm.
[9] O ABS começa a se deformar na temperatura de 80° Celsius, mas derrete somente a
105°C, suporta uma força de tensão de 28.27 Mega Pascal e possui um módulo de Flexão de
1,862 Giga Pascal.
A Resistência moderada do ABS trabalha a nosso favor neste projeto, pois, caso
alguma parte se solte ou fique preza no interior de algum equipamento, por ser de um material
mais macio que o aço, dificilmente causará algum dano.
4.2 DESENVOLVIMENTO DO SISTEMA DE LOCOMOÇÃO
Como recomendado por diversos autores e o próprio Altshuller, para começar o
desenvolvimento e aprimoramento do sistema de locomoção foi utilizado o ARIZ-85C. Está
descrito abaixo os pontos principais deste desenvolvimento. A aplicação completa da ARIZ-
85C pode ser encontrada no APÊNDICE A. Para explicações sobre o preenchimento da
ARIZ-85C, recorra ao ANEXO H que possui a descrição desta ferramenta.
4.2.1 ARIZ-C parte 1
Na primeira parte da ARIZ-85C analisa-se o problema no sistema de locomoção.
Nela são arroladas algumas características básicas do sistema que podem parecer elementares,
porém, com o avanço do desenvolvimento e da busca de uma solução, detalhes bem definidos
ajudam a encontrar uma solução ótima mais rapidamente.
Com as definições básicas descritas, identificam-se os conflitos e os intensificamos.
Como dito anteriormente, um problema não existe sem uma contradição e intensificando-as,
torna-se mais aparente a causa raiz do problema.
Tabela 7: Trecho de descrição do conflito na ARIZ-85C.
1.4. Exprimir o conflito no
sistema de maneiras opostas.
CNF1: Reduzir as rodas para que elas
ocupem menos espaço; CNF2: rodas maiores
ultrapassam melhor obstáculos; CNF3: é preciso se](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-53-320.jpg)
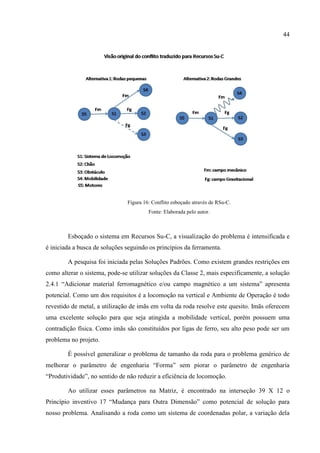
![45
seria somente o aumento de tamanho, porém se for sobreposto este sistema em um plano
cartesiano, com a variação de uma dimensão linearmente, é encontrado um oblongo, parecido
com um rasgo de chaveta. O que existe parecido com esta forma sendo utilizada como sistema
de locomoção é a esteira em tratores (“continuous track”). Como listado pelo blog de robótica
[5] buildbot.com.br, esteiras possuem as seguintes vantagens e desvantagens:
Vantagens
o O contato constante com o solo, evita perda de tração;
o Distribui o peso uniformemente, possibilitando enfrentar uma grande
variedade de superfícies;
Desvantagens
o Quando acionado somente um motor para direcionamento, existe uma
força lateral que causa desgaste da superfície da esteira;
o Para uma maior variedade de terreno e dependendo do tamanho da
banda da esteira, opta-se pelo uso de diversas trilhas, o que aumenta a
complexidade mecânica;
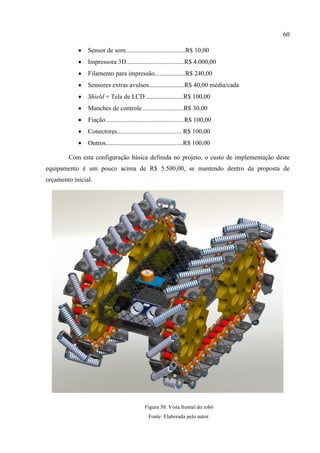
A unificação destas duas soluções pode ser representada em recursos Su-C como na
Figura 17
Figura 17: RSu-C da esteira com imãs
Fonte: Elaborada pelo autor.
Apesar de a esteira aumentar a mobilidade do sistema foi considerado que este ainda
não atingiu o nível de idealidade esperado.](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-57-320.jpg)

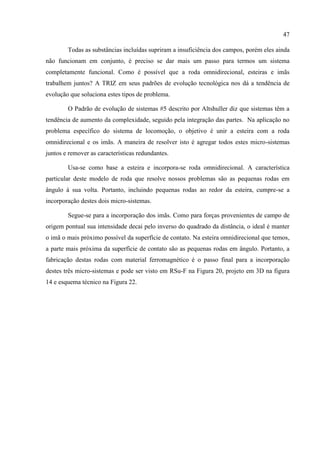


![51
Adotando uma média das medições, é possível afirmar que cada imã é capaz de
oferecer uma força de atração em uma chapa metálica de 110 grama-força (gf) ou 1,0769
Newtons (N).
Sabendo que cada seguimento da esteira possui 16 imãs e considerando somente a
força dos cinco seguimentos da esteira que mantêm pleno contato com o chão, é possível
estimar a força total realizada pelos imãs das duas esteiras como:
1.0769[𝑁] ∗ 16 ∗ 5 ∗ 2 = 172.304[𝑁] (4.1)
O coeficiente de atrito dependerá da superfície em que o robô irá atuar. Porém, pela
tese de doutorado de [22] Parucker (2008), é possível se basear no pior caso para o níquel, que
é o metal que reveste os imãs. Segundo [22] Parucker (2008), o coeficiente de atrito entre
ligas de níquel varia de 0,29 a 1,0. É adotado, portanto, o pior caso de 0,29 para a subida
vertical. A força de atrito é dada pela equação (4.2).
𝐹𝑎𝑡 = 𝐹𝑛 ∗ 𝜇 𝑠𝑡 (4.2)
Onde Fn é a força normal à superfície, neste caso Fn é igual à Fimã encontrada
anteriormente e μst é o coeficiente de atrito. A força de atrito é calculada como sendo:
𝐹𝑎𝑡 = 172.304 [𝑁] ∗ 0.29 = 49.968 [𝑁] (4.3)
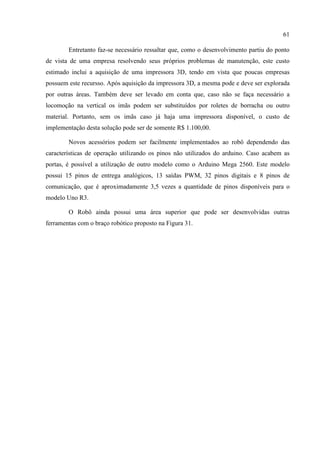
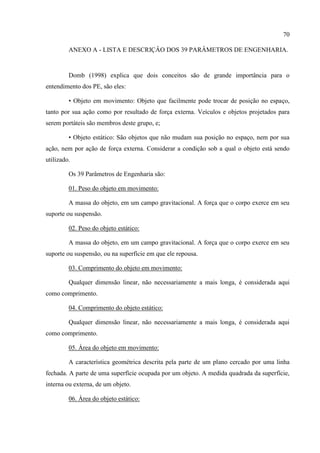
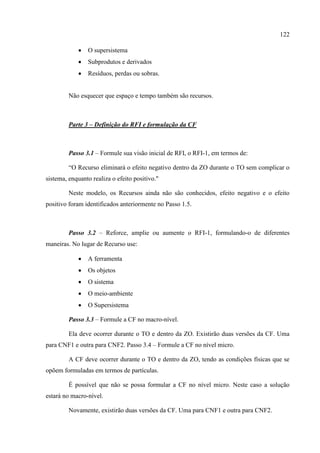
No programa utilizado para fazer o desenho do modelo (SolidWorks 2014) foi
adicionado as características de materiais de cada uma das partes do robô. Com essas
informações o programa retorna as propriedades de massa do objeto desenhado. A resposta do
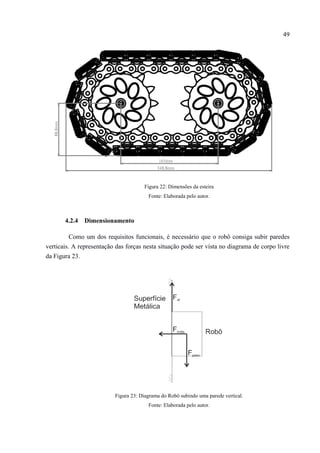
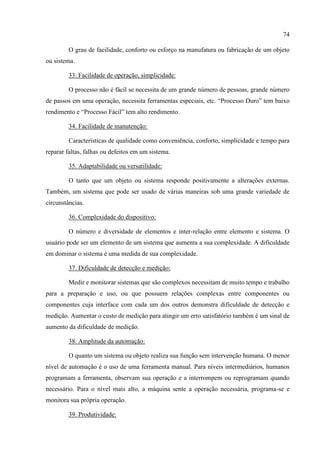
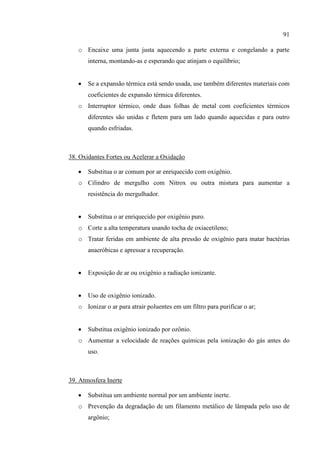
programa pode ser visto na figura](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-63-320.jpg)
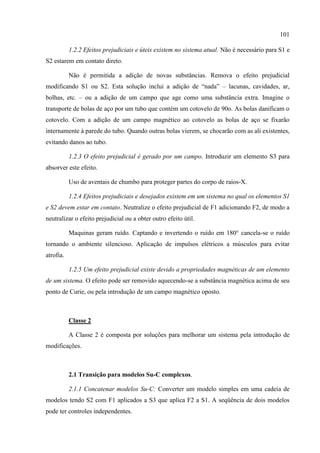
![52
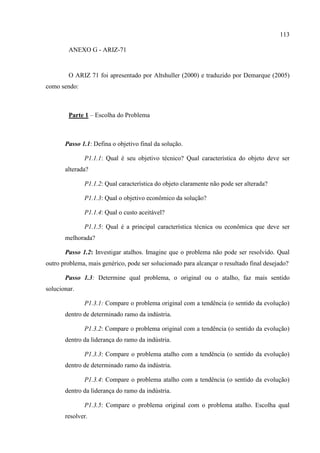
Figura 25: Propriedades de massa do Robô gerado pelo SolidWorks
Fonte: Elaborada pelo autor.
O peso do robô, portanto é de 18,5N sendo a força de atrito aproximadamente 2,7
vezes maior. Isto significa que o robô pode subir em uma superfície vertical rebocando uma
massa de mais de 3 kg.
Para realizar este trabalho, os motores devem ser capazes de gerar torque suficiente
para realizar este trabalho. A Figura 22 mostra que a distância do centro do eixo do motor a
superfície de contato é de 88,8mm. Sendo a força (F) gerada pelo motor na superfície a razão
do torque pela distância mencionada, o torque (T) de cada um dos quatro motores deve ser:
𝐹 = 49.968[𝑁] =
4 ∗ 𝑇
8.88[𝑐𝑚]
∴ 𝑇 = 110,929[𝑁 ∗ 𝑐𝑚] (1.1)](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-64-320.jpg)
![53
Apesar de ser um torque relativamente alto, soluções com as dimensões necessárias
podem ser encontradas em diversos fabricantes.
4.3 DESENVOLVIMENTO DA AUTONOMIA
Altshuller sugere a utilização de um ARIZ para a resolução de problemas, em
especial problemas complexos. Porém ele, e todos os autores sobre o método, concordam que
a utilização das ferramentas é de total arbitrariedade do pesquisador e que as ferramentas
retêm sua capacidade de solução de problemas mesmo sendo afinidade ou preferência o único
método de seleção.
Aqui foi englobado em autonomia, todo e qualquer fator que influencie na amplitude
da área de atuação do robô, tais como a quantidade de tempo que o robô pode permanecer em
operação, assim como influências externas e internas que causem o término (abrupto ou não)
de sua operação.
Como uma das características fundamentais levantadas no início do
desenvolvimento, o Robô de inspeção não pode, de maneira nenhuma, ficar preso dentro do
equipamento sendo inspecionado. Com isso, desenvolvimento do sistema da autonomia é
focado na robustez e confiabilidade do sistema. [14] Hipple (2006) em seu artigo para Triz
Journal, sugere a utilização de método TRIZ em “reverso” como um método de predição de
falhas. Em síntese, em vez de o pesquisador pesquisar maneiras de melhorar o sistema, o
TRIZ Reverso propõe se tornar o sabotador do sistema e analisar o que deve ser feito para
inutiliza-lo.
O ARIZ pode ser simplificado para:
1. Identifique o estado ideal;
2. Identifique os recursos necessários para se chegar a este estado;
3. Identifique as contradições que devem ser resolvidas;
4. Identifique como utilizar estes recursos e resolver tais contradições;
5. Implementar e checar qualidade da solução.
[14] Hipple (2006) sugere como método “reverso”, no sentido de linha de raciocínio,
de Análise de predição de falhas simplificado as seguintes etapas:
1. Identifique o estado ideal;
2. Inverta o estado ideal;](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-65-320.jpg)
![54
3. Exagere o estado ideal invertido;
4. Como conseguimos atingir este estado ideal invertido.
Com esta linha de pensamento e análise pode-se utilizar das ferramentas do método
TRIZ, não para solucionar problemas, mas para analisar quais efeitos causarão uma falha em
nosso sistema e, uma vez identificada, implementar o método original de solução de
problemas e contradições.
4.3.1 Aplicando a TRIZ Reversa.
Seguindo a linha proposta por [14] Hipple (2006) e a definição de autonomia dada
anteriormente, o estado ideal do sistema pode ser descrito pelas características:
1. O sistema nunca para de funcionar, mantendo boa intensidade de sinal
durante toda sua atividade;
2. O sistema não perde ou corrompe nenhum bit durante a transmissão de dados;
3. O sistema possui baixo consumo de energia resultando em poucas baterias e
menor peso
4. Não sofre interferência de fontes externas que possam causar perda de sinal
ou mau-funcionamento.
Depois de descritas as características ideais, este estado é invertido e amplificado:
1. Nenhuma comunicação deve ser realizada, toda transmissão de informação
deve ser bloqueada;
2. Qualquer informação que consiga ser transmitida deve sofrer interferência
suficiente para torná-la ilegível.
3. Sistema de alto consumo de energia com todos os sensores e dispositivos em
plena atividade simultânea resultando na necessidade de grandes baterias.
4. Altamente susceptível a campos magnéticos, mudanças de temperatura e
umidade.
Com isso, têm-se descrito de maneira genérica as possíveis falhas e problemas que há
na autonomia de nosso sistema. O passo seguinte é descrever como pode-se realizar esta
“sabotagem” no sistema. Enumera-se então como é possível atingir cada um destes estados
ideais invertidos.](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-66-320.jpg)



![66
7 BIBLIOGRAFIA
[1] ALTSHULLER, G. S., The Innovation Algorithm – TRIZ, systematic innovation and
technical creativity. Tradução para o inglês de Lev Shulyak e Steven Rodman. 2 ed.
Worcester, Massachusetts, USA: Technical Innovation Center, Inc., 2000.
[2] ALTSHULLER G.S. Small Huge Worlds: Standards for Inventive Problem Solving -
A Thread in the Labyrinth, Compiled by Selyutsky, A.B. - Petrozavodsk: Karelia,
1988.
[3] ARDUINO SA Arduino Uno board description Disponível em:
<http://arduino.cc/en/Main/arduinoBoardUno> Acesso em: 27 out. 2014
[4] BRASIL, Lei Estadual 4.192 de 01 de outubro de 2003.
[5] BUILDBOT, Como seu robô vai se mover ?, Disponível em: <http://buildbot.com.br/
blog/como-seu-robo-vai-se-mover/> Acesso em 04 nov. 14.
[6] CARVALHO, M. A. e BLACK, N., Uso de conceitos fundamentais da TRIZ e do
método dos princípios inventivos no desenvolvimento de produtos., 2001, 3o.
Congresso Brasileiro de gestão de Desenvolvimento de produto. Florianópolis, SC.
[7] CARE, I., MANN D., Using MindMaps™ with TRIZ, Triz Journal, Disponível em:
<http://www.triz-journal.com/using-mindmaps-triz/> Acesso em: 24 out. 2014.
[8] COULOURIS, George et al. Projetos com Arduino e Android: Use seu Smartphone
ou Tablet para Controlar o Arduino - Série Tekne. Bookman Editora, 2014.](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-78-320.jpg)
![67
[9] CURBELL PLASTICS, ABS Data Sheet (Engineering), 2008 Disponível em:
<http://www.curbellplastics.com/technical-resources/pdf/abs-eng-datasheet-
curbell.pdf> Acesso em 27 out. 2014
[10]DEMARQUE, E. TRIZ: Teoria para a resolução de problemas inventivos aplicada
ao planejamento de processos na indústria automotiva. 2005. Tese de Doutorado.
Universidade de São Paulo, São Paulo, Brasil.
[11]DOMB, E. The Ideal Final Result: Tutorial. Triz Journal. Disponível em:
<http://www.triz-journal.com/archives/1997/02/a/index.html>. Acesso em: 25 set.
2014.
[12]DOMB, E., Contradictions: Air Bag Applications, Junho de 1997, Disponível em:
<http://www.xtriz.com/publications/40Principles.pdf>, Acesso em: 27 out. 2014
[13]DOMB, E., et all. The 39 Features of Altshuller’s Contradiction Matrix. Triz
Journal. Disponível em: <http://www.triz-journal.com/archives/1998/11/d/
index.htm>. Acesso em: 25 set. 2014.
[14]HIPPLE, J., Predictive Failure Analysis™: How to Use TRIZ in “reverse”.
Disponível em: <http://www.triz-journal.com/predictive-failure-analysis-use-triz-
reverse/> Acesso em: 27 out. 14
[15]HIPPLE, J., The Ideal Result - What It Is and How to Achive It, Springer Science+
Business Media, Tampa, Florida, Estados Unidos, 2012
[16]LEON, N., Trends and Patterns of Evolution for Product Innovation. Disponível em:
<http://www.triz-journal.com/trends-patterns-evolution-product-innovation/> Acesso
em: 22 out. 14.](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-79-320.jpg)
![68
[17]MAIA, Izaque Alves et al. Exploração Dos Recursos De Impressão 3d Para Peças
Especiais. Artigo do 7º Congresso Brasileiro De Engenharia De Fabricação 2013.
[18]MARCONI, J. ARIZ: The Algorithm for inventive problem Solving – An
Americanized Learning Framework. Triz Journal. Disponível em: <http://www.triz-
journal.com/archives/1999/03/e/index.htm>. Acesso em: 25 set. 2014.
[19]MAZUR, G., Theory of Inventive Problem Solving., 26 de fevereiro de 1996,
disponível em: <http://www.mazur.net/triz/>. Acesso em : 20 jul. 2014.
[20]PALLETA, M., A. Manutenção Industrial – Convivendo com problemas ou
soluções. Pragma Brasil. Disponível em: <http://www.pragmabrasil.com.br/wpb/
index.php/midia/artigos/art-manindustrial> Acesso em: 01 out. 2014.
[21]PETROV, V., Структурный вещественно-полевой анализ, Triz Land, Disponível
em: <http://www.trizland.ru/trizba/books/1756/> Acesso em: 20 out. 2014.
[22]PARUCKER, M. L., Desenvolvimento De Materiais Compósitos De Baixo
Coeficiente De Atrito Com Partículas De Lubrificante Sólido Dispersas Em Matriz
Metálica A Base De Níquel. 2008. Tese (Doutorado Em Ciência E Engenharia De
Materiais), Universidade Federal de Santa Catarina, Santa Catarina.
[23]SAVRANSKY, S. D., Engineering of creativity: Introduction to TRIZ methodology
of inventive problem solving. CRC Press, 2002.
[24]TATE, K., DOMB, E. 40 Inventive Principles With Examples. Triz Journal.
Disponível em: <http://www.triz-journal.com/archives/1997/07/b/index.html>.
Acesso em: 21 set. 2014.](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-80-320.jpg)
![69
[25]TERNINKO, J., DOMB, E., MILLER, J. The Seventy-six Standard Solutions, with
Examples. Section One. Triz Journal. Disponível em: <http://www.triz-
journal.com/archives/2000/02/g/index.htm>. Acesso em: 25 set. 2014.
[26]TERNINKO, J., ZUZMAN, A., ZLOTIN, B., Systematic Innovation - An
Introduction to TRIZ (Theory of Inventive Problem Solving). 1ed, USA, St. Lucie
Press, 1998.
[27]ZAGORODNOVA, T. Algoritmo de Resolución de Problemas Inventivos (ARIZ 85).
Official G. S. Altshuller Foundation. Disponível em
<http://www.altshuller.ru/world/spa/ariz85v.asp>. Acesso em: 25 set. 2014.](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-81-320.jpg)




![107
neste efeito. O efeito Hall é usado para medir e controlar a velocidade de motores elétricos de
precisão e de velocidade variável.
4.3.2 Se as alterações em um sistema não podem ser determinadas diretamente ou
através da passagem de um campo, meça a alteração na freqüência de ressonância do
sistema ou de um elemento a fim de medir as mudanças.
A afinação de um piano através do uso de diapasão.
4.3.3 Se não é possível atuar como em 4.3.2, meça a freqüência de ressonância de
um objeto unido a outro com propriedades conhecidas.
Medição de capacitância através da freqüência de ressonância de circuito RLC
(consistindo de um resistor [R], um indutor [L], e um capacitor [C] que qualquer tensão ou
corrente nele pode ser descrita por uma equação diferencial de segunda ordem), onde R e L
são conhecidos.
4.4 Medir um Campo eletromagnético:
A introdução de materiais ferromagnéticos para auxiliar na medição foi popular antes
do desenvolvimento de sensores remotos, mini-dispositivos, fibras ópticas,
microprocessadores, etc.
4.4.1 Adição ou uso de substância ferromagnética e campo magnético em um
sistema para facilitar a medição.
Determinação da velocidade de veículos pela colocação de bobinas sob o pavimento.
4.4.2 Adição de partículas magnéticas em um sistema ou alteração de uma
substância em partículas ferromagnéticas para facilitar a medição por detecção do campo
magnético resultante.
Introdução de partículas ferromagnéticas em tinta para facilitar a leitura de código de
barras.
4.4.3 Se não é permitida a adição de partículas ferromagnéticas diretamente ao
sistema ou uma substância não pode ser substituída por partículas ferromagnéticas, construa
um sistema mais complexo, acrescentando aditivos ferromagnéticos à substância.
4.4.4 Adição de partículas ferromagnéticas ao meio-ambiente, se elas não podem ser
adicionadas ao sistema.](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-119-320.jpg)






![120
ANEXO H - ARIZ-85C
Tendo como referência [18] Marconi (1999) e [27] Zagorodnova (2004), descreve-se
abaixo o ARIZ-85C.
Fase 1 – Formulação do problema
Parte 1 – Análise do sistema
Passo 1.1 - Descreva o sistema e o problema que deve ser resolvido como é
enxergado neste momento. Pode-se usar o QCI para realizar esta parte.
Passo 1.2 – Selecionar e anotar um par de elementos em conflito, o objeto e a
ferramenta. Objeto é o elemento que de acordo com as condições do problema sofre ação de
uma ou mais ferramentas. Ferramenta é o elemento que interage com o objeto (o fogo e não o
acendedor).
Passo 1.3 - Descreva o mini-problema (MP). O objetivo é descrever o problema de
forma que para solucioná-lo promova-se a mínima alteração ao sistema, ou, tudo no sistema
permanece o mesmo, e a função desejada é realizada com a menor alteração.
Passo1.4 – Exprimir o conflito no sistema de maneiras opostas:
CNF1: Na tentativa de eliminar ou diminuir a ação indesejada, degrada- se a
ação desejada.
CNF2: Na tentativa de melhorar a ação desejada, aumenta-se a ação
indesejada.
Passo1.5 – Intensificar o conflito. Isto traz melhor qualidade para a solução e esta
poderá ser aplicada na solução de uma maior quantidade de problemas.
CNF1: A ação indesejada é completamente eliminada, mas a ação desejada
não é realizada.
CNF2: A ação desejada é realizada por completo, mas a ação indesejada
torna-se a pior possível.](https://image.slidesharecdn.com/8e5c1e9a-0a44-4a0a-a79f-0375c7dbff3f-141231125025-conversion-gate02/85/Tcc-2-0-132-320.jpg)










Este trabalho aplica a metodologia TRIZ (Teoria de Resolução Inventiva de Problemas) para desenvolver uma solução para inspeção de instalações industriais de difícil acesso. A TRIZ é usada para projetar um dispositivo robótico capaz de realizar inspeções de forma autônoma. O dispositivo foi desenvolvido usando ferramentas como impressora 3D e plataforma Arduino para validar a aplicação da metodologia TRIZ no problema propost



























