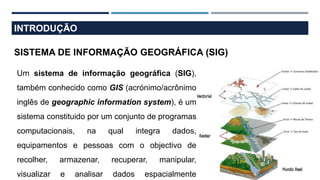
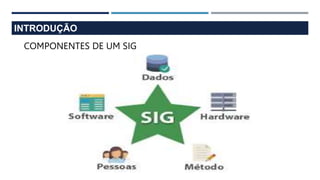
1) O documento discute os conceitos básicos de Sistemas de Informação Geográfica (SIG), incluindo seus componentes principais como dados, software, hardware e recursos humanos.
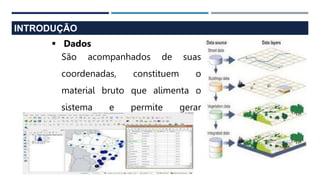
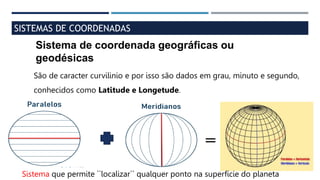
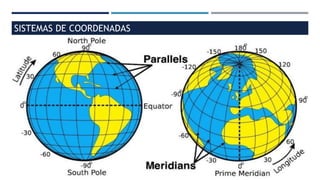
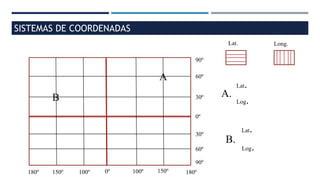
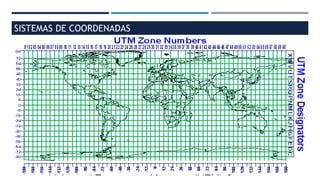
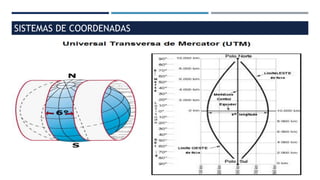
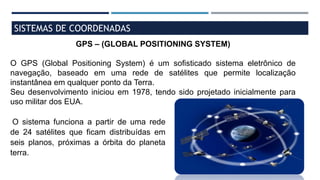
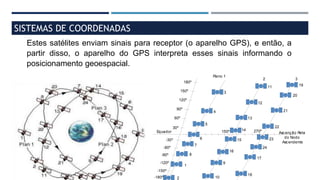
2) É introduzido o sistema de coordenadas geográficas e de coordenadas UTM, assim como o GPS para coleta de dados espaciais.
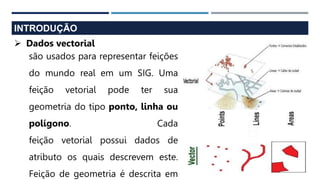
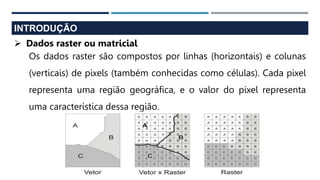
3) Os diferentes tipos de dados vetoriais e raster utilizados em SIG são explicados.