Transferir como PDF, PPTX

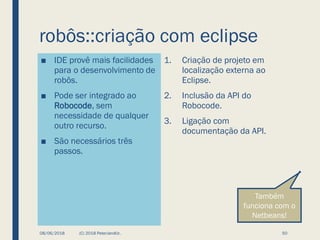
![robocode::instalação
■ Fazer download em:
https://sourceforge.net/projects/robocode/files/
robocode | robocode-1.9.3.2-setup.jar [2018-04-04]
■ Não descompacte o arquivo!
Que deve ser executável, se a configuração do Java estiver
correta no seu computador!
– Executable Jar File → dois cliques para executar
next, next e tudo dará certo!
– Outra extensão:
■ Prompt de comandos
■ Navegar até diretório de download
do arquivo obtido.
■ Acione o comando:
java –jar robocode-1.9.3.2-setup.jar
08/06/2018 (C) 2018 PeterJandlJr. 23
Precisamos do Java JDK
7+ instalado no sistema!](https://image.slidesharecdn.com/robocode-666-fatec-20180608-oficina-180608174035/85/Robocode-666-23-320.jpg)
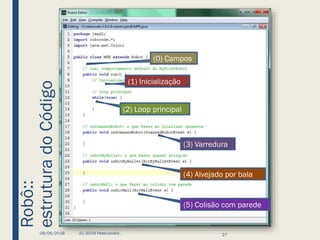

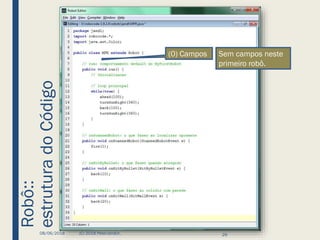

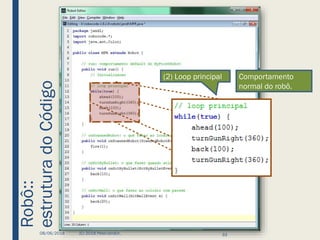
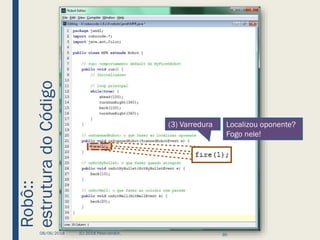
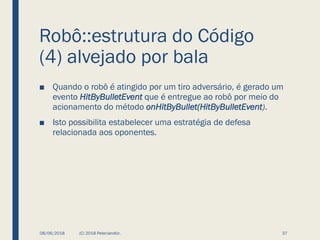
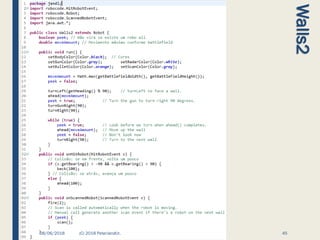
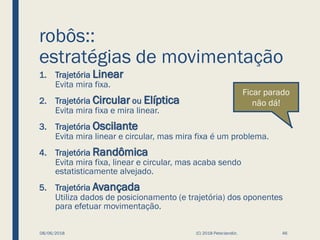
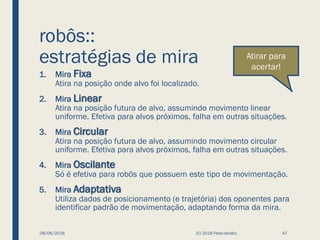
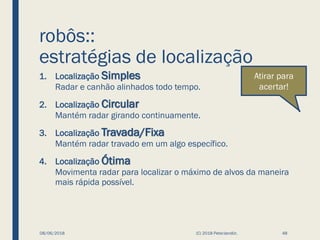

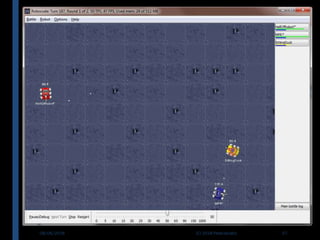




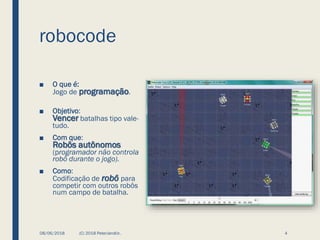
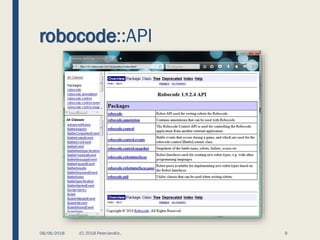
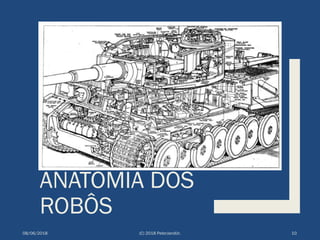
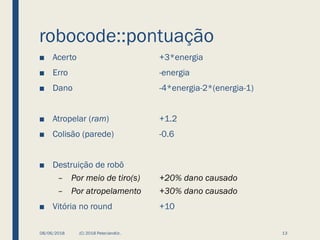
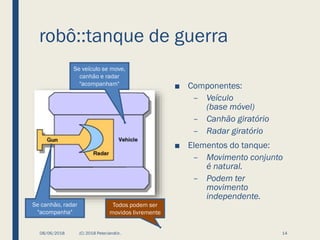
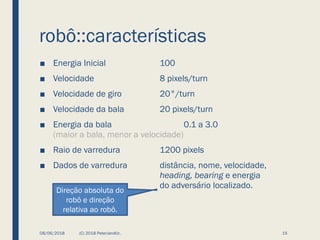
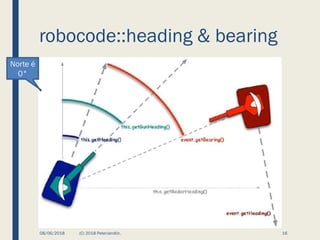
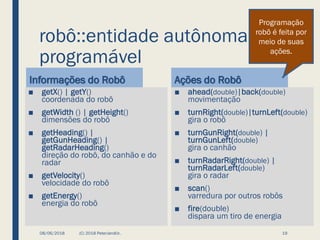
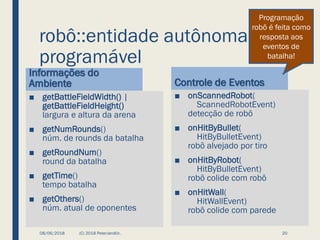
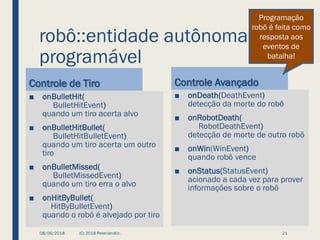
O documento descreve o jogo Robocode, no qual os jogadores programam robôs autônomos para batalhar em um campo de batalha virtual. Robocode ensina conceitos de programação ao exigir que os jogadores programem robôs para se movimentarem, atirarem e reagirem a eventos durante as batalhas.






































