Baixar para ler offline









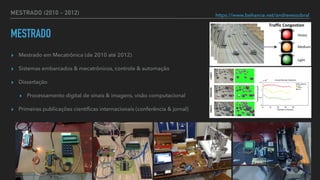







O documento resume a trajetória acadêmica e profissional de Andrews Cordolino Sobral, engenheiro de computação com doutorado em inteligência artificial. Ele possui graduação em engenharia de computação, mestrado focado em processamento de imagens e visão computacional e doutorado em aprendizado de máquina. Atualmente trabalha com pesquisa e desenvolvimento em automação e inteligência artificial.