Transferir como PDF, PPTX


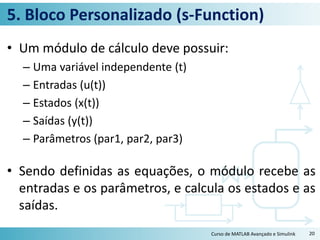
![5. Bloco Personalizado (s-Function)
• Criando a função
function [sys,x0]=system(t,x,u,flag,par1,par2,par3)
switch flag
case 0
% Inicialização.
% Deve retornar em 'sys' o número de entradas, estados
% e saídas, e em 'x0' os estados iniciais.
case 1
% Deve usar 'u' e 'x' e retornar em 'sys' as derivadas.
case 2
% Não será usado.
case 3
% Deve retornar em 'sys' as saídas.
otherwise
end
Curso de MATLAB Avançado e Simulink 22](https://image.slidesharecdn.com/simulink-180823153526/85/Curso-de-Simulink-22-320.jpg)
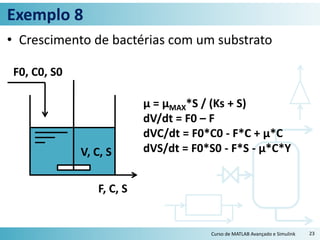
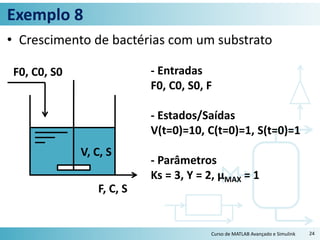
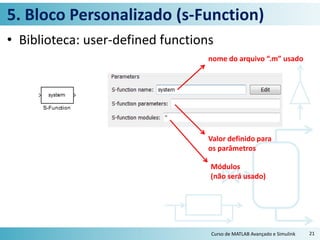
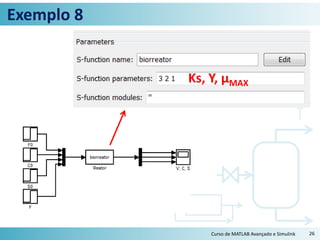
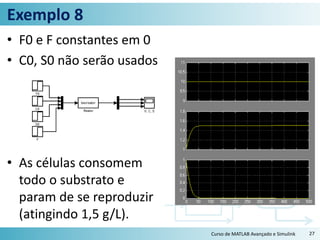
![Exemplo 8
function [sys,x0]=biorreator(t,x,u,flag,par1,par2,par3)
switch flag
case 0
sys=[3,0,3,4,0,0];
% estados,0,saídas,entradas,0,0
x0=[10;1;1];
case 1
F0=u(1); C0=u(2); S0=u(3); F=u(4);
V=x(1); C=x(2); S=x(3);
Ks=par1; Y=par2; mimax=par3;
mi=mimax*S/(Ks+S);
dVdt=F0-F;
dCdt=(F0*C0-F*C+mi*C)/V;
dSdt=(F0*S0-F*S-mi*C*Y)/V;
sys=[dVdt;dCdt;dSdt];
case 3
sys=[x(1);x(2);x(3)];
otherwise
end
Curso de MATLAB Avançado e Simulink 25](https://image.slidesharecdn.com/simulink-180823153526/85/Curso-de-Simulink-25-320.jpg)

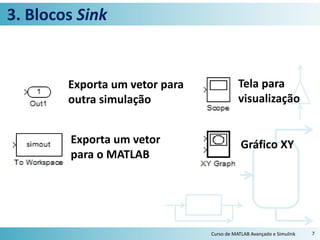
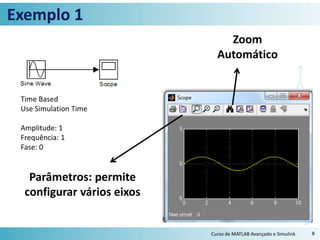
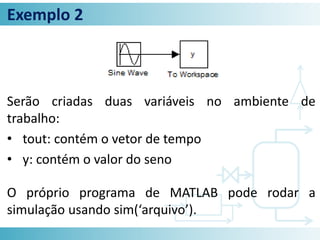
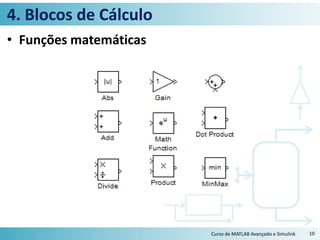
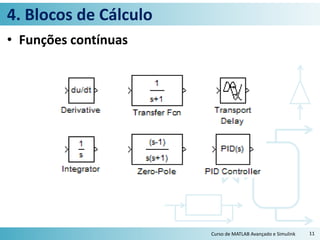
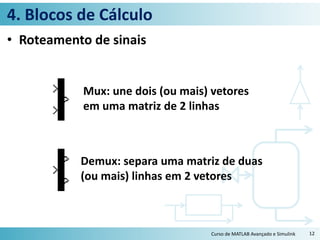
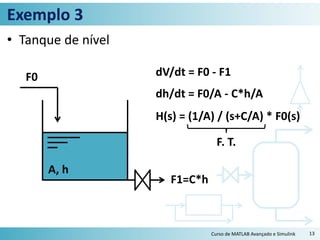
O documento apresenta uma introdução ao software Simulink, descrevendo seus principais recursos e funcionalidades, como: simulação orientada a objetos, biblioteca de blocos para modelagem de sistemas, blocos fonte, cálculo e sumidouro. Exemplos ilustram o uso de blocos para modelagem de sistemas como tanques e processos biológicos.

































