Aula 02 controle malha aberta e fechada
•
3 gostaram•5,954 visualizações

automotion

Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (20)
Semelhante a Aula 02 controle malha aberta e fechada
Semelhante a Aula 02 controle malha aberta e fechada (20)
Aula 02 controle malha aberta e fechada
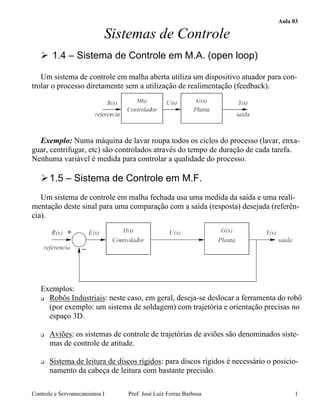
- 1. Aula 03 Controle e Servomecanismos I Prof. José Luiz Ferraz Barbosa 1 Sistemas de Controle 1.4 Sistema de Controle em M.A. (open loop) Um sistema de controle em malha aberta utiliza um dispositivo atuador para con- trolar o processo diretamente sem a utilização de realimentação (feedback). Exemplo: Numa máquina de lavar roupa todos os ciclos do processo (lavar, enxa- guar, centrifugar, etc) são controlados através do tempo de duração de cada tarefa. Nenhuma variável é medida para controlar a qualidade do processo. 1.5 Sistema de Controle em M.F. Um sistema de controle em malha fechada usa uma medida da saída e uma reali- mentação deste sinal para uma comparação com a saída (resposta) desejada (referên- cia). Exemplos: Robôs Industriais: neste caso, em geral, deseja-se deslocar a ferramenta do robô (por exemplo: um sistema de soldagem) com trajetória e orientação precisas no espaço 3D. Aviões: os sistemas de controle de trajetórias de aviões são denominados siste- mas de controle de atitude. Sistema de leitura de discos rígidos: para discos rígidos é necessário o posicio- namento da cabeça de leitura com bastante precisão.
- 2. Aula 03 Controle e Servomecanismos I Prof. José Luiz Ferraz Barbosa 2 Controle Manual: algumas vezes a malha fechada pode ser executada através de um operador, como pode ser observado na figura abaixo, onde um opera- dor controla o nível d´água de um tanque. Uma das operações manuais mais sofisticadas realizadas pelo homem é a direção de um automóvel, onde a informação de realimentação são imagens que são reali- mentadas através do sistema de visão humanos.
- 3. Aula 03 Controle e Servomecanismos I Prof. José Luiz Ferraz Barbosa 3 Principais vantagens dos sist. de controle de M.A. 1) São simples de ser construídos e tem fácil manutenção; 2) São menos dispendiosos do que um sistema correspondente de M.F. 3) Não apresentam problemas de estabilidade; 4) São apropriados quando existem dificuldades de avaliação da saída ou quando a medição precisa da saída não é economicamente possível. Principais desvantagens dos sist. de controle de M.A. 1) Distúrbios e mudanças na calibração causam erros, e a saída pode apre- sentar diferenças em relação ao padrão esperado. 2) Para que a saída mantenha a qualidade requerida, é necessária uma regu- lagem periódica. 1.6 Componentes de um sistema de controle Uma versão detalhada do diagrama funcional de um SCMF é dada na figura aci- ma. Este diagrama mostra os principais componentes do sistema de controle, defini- dos a seguir: Referência: Valor desejado da variável a ser controlada. Comparador: Dispositivo que constrói o sinal de erro entre o valor desejado e o obtido. Controlador: Dispositivo que manipula o sinal de erro, gerando um sinal de controle que será aplicado no sistema, afim de corrigir a variável a ser controla- da. Atuador: Dispositivo que recebe o sinal de controle e gera um sinal com po- tência suficiente para atuar sobre o sistema. Exercício: Considere um avião com um sistema automático de navegação (piloto au- tomático). Faça o diagrama de blocos deste sistema. Quais as perturbações que atuam no sistema?
- 4. This document was created with Win2PDF available at http://www.win2pdf.com. The unregistered version of Win2PDF is for evaluation or non-commercial use only.