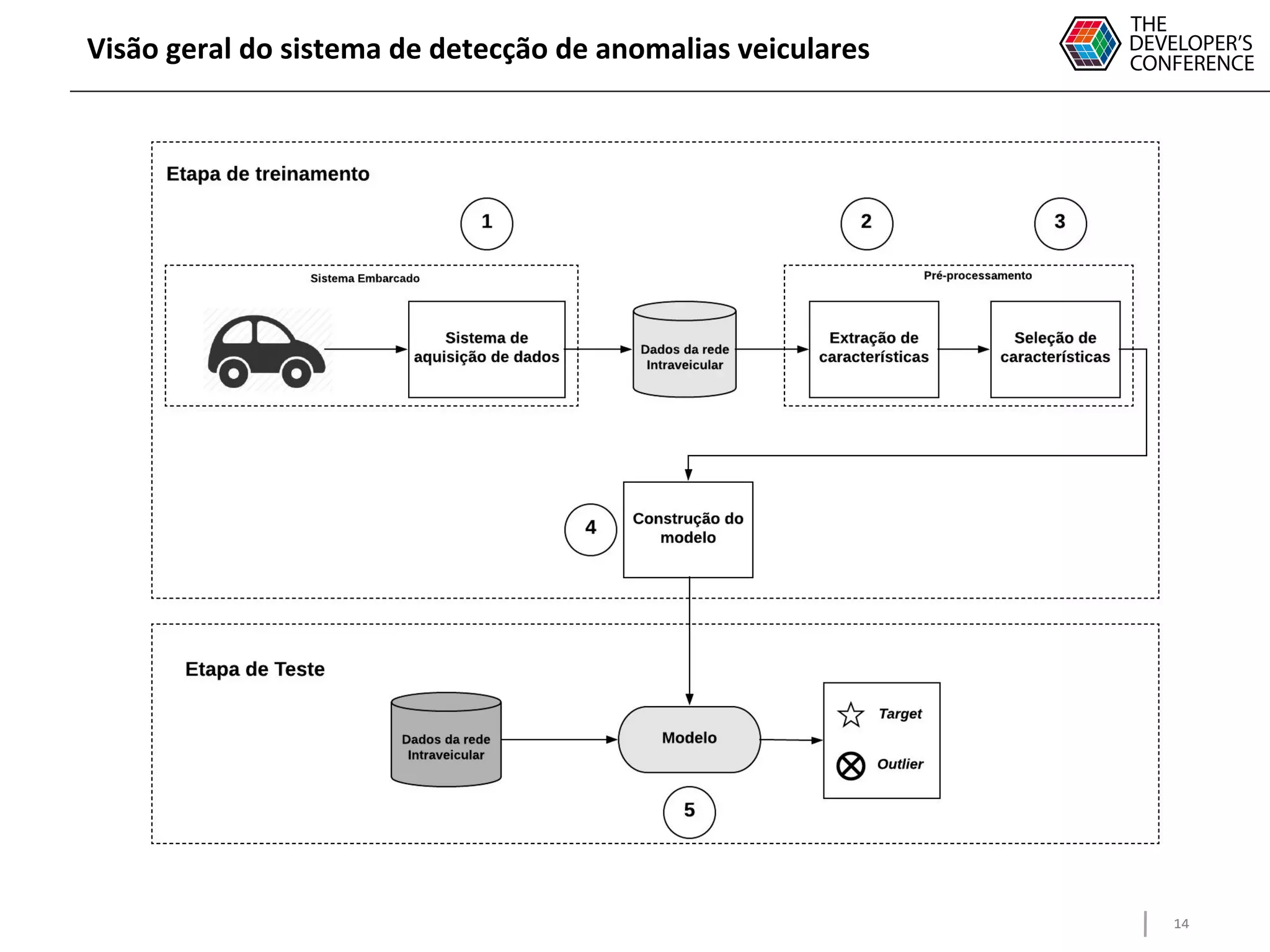
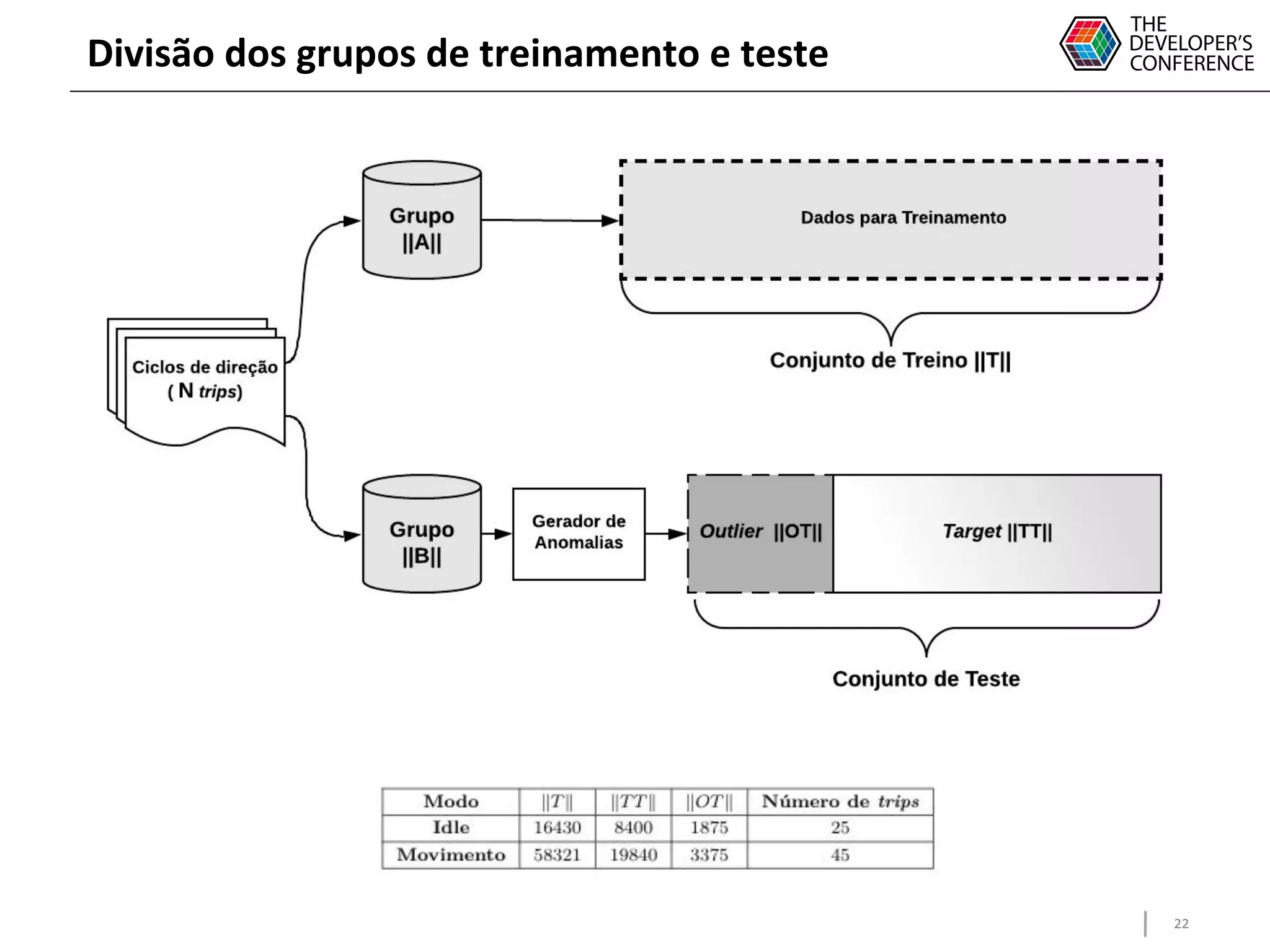
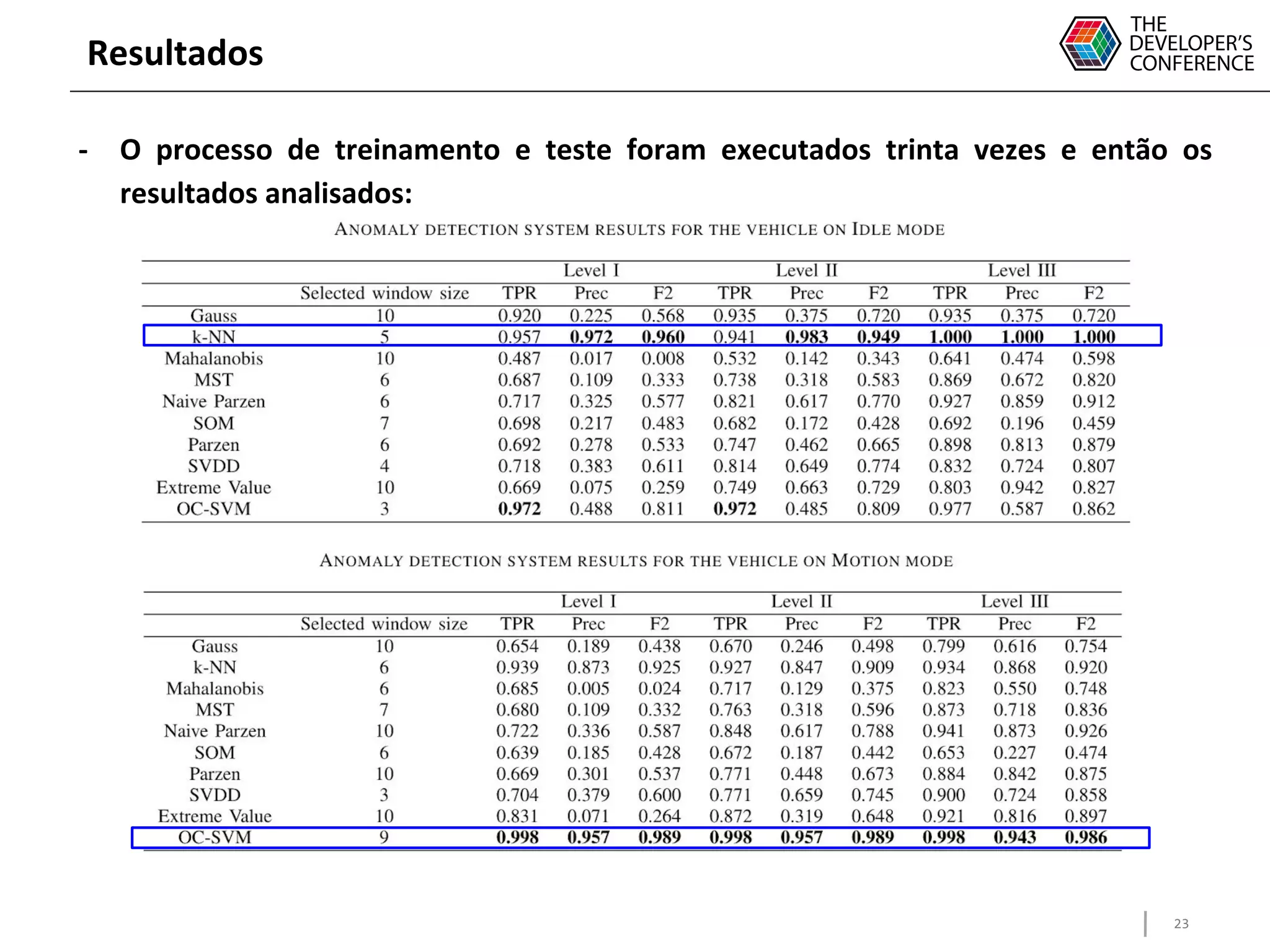
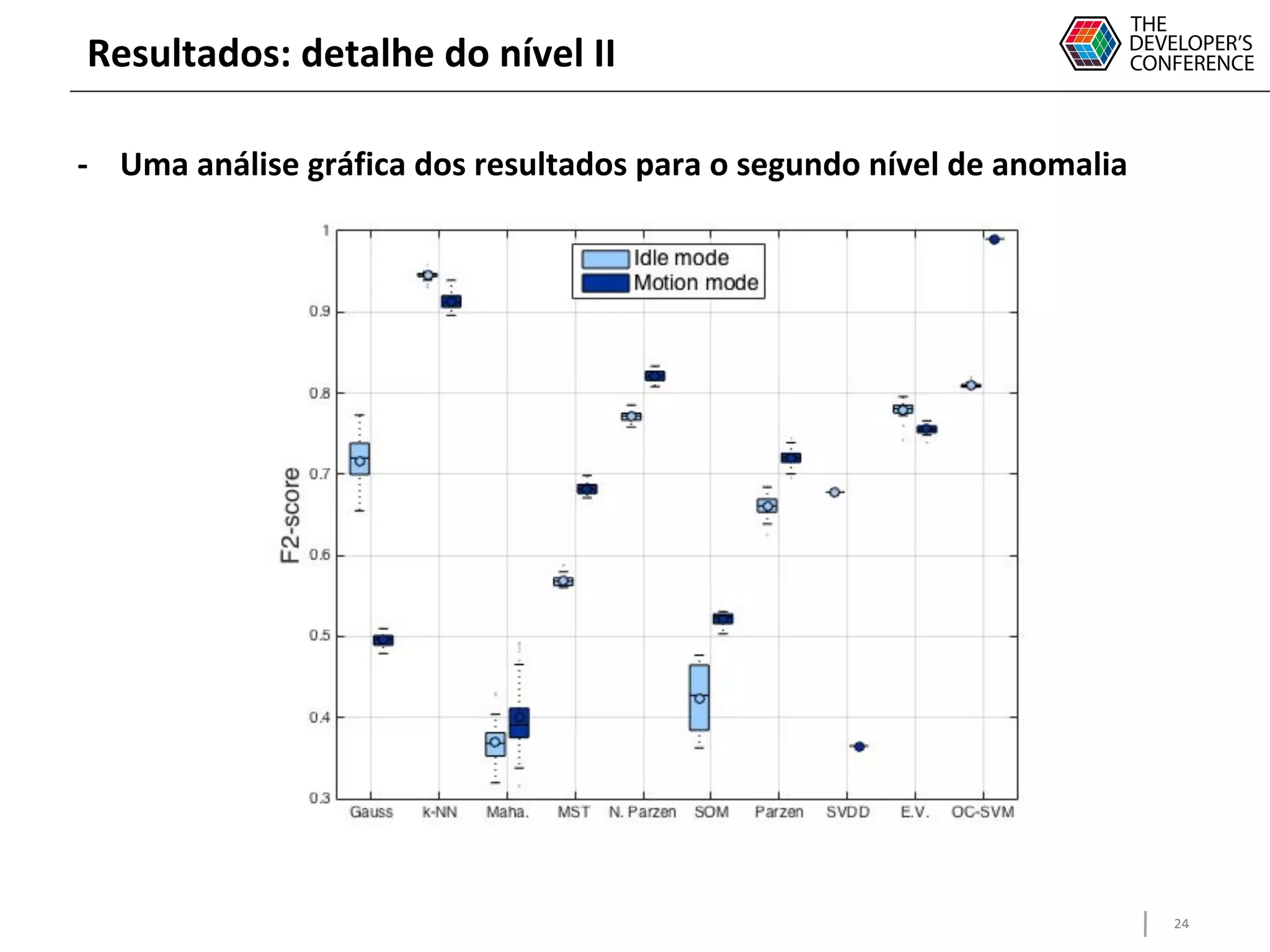
O documento apresenta um sistema para detecção de anomalias no sensor do líquido de arrefecimento de um motor veicular utilizando classificadores one-class. O sistema coleta dados de sensores de um veículo, extrai características, insere anomalias artificiais e treina e avalia os classificadores para detecção das anomalias. Os resultados mostraram que o SVDD obteve o melhor desempenho na detecção de anomalias.