Baixar para ler offline


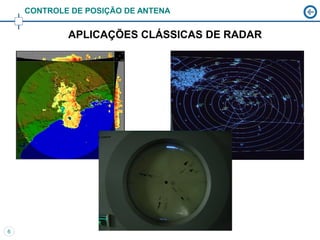
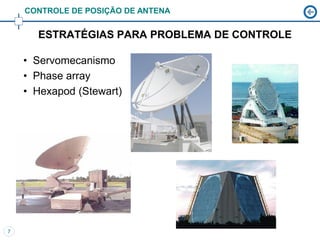
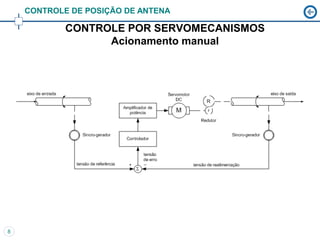
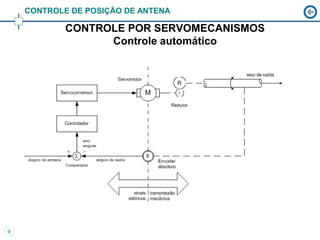
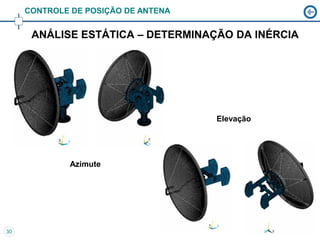
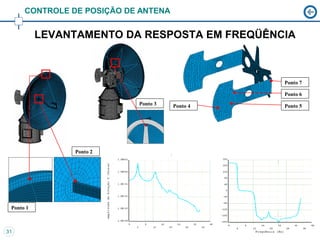
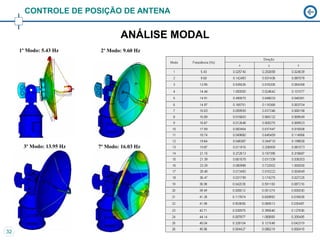
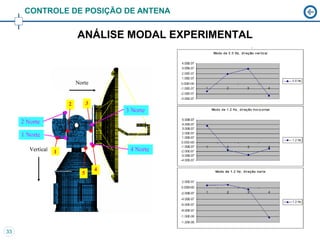



Este documento apresenta o projeto e implementação do controle de posição de uma antena de radar meteorológico através de servomecanismos. Os objetivos incluem especificar o projeto, propor um modelo teórico da estrutura da antena para simulação e análise, e implementar o sistema de controle proposto em um projeto real de engenharia para um radar meteorológico.


























![Firewall.[1]](https://cdn.slidesharecdn.com/ss_thumbnails/firewall-1-100907220602-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)




















