Baixado 17 vezes




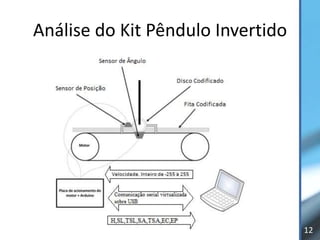
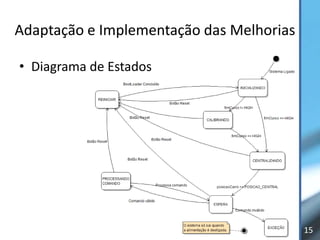

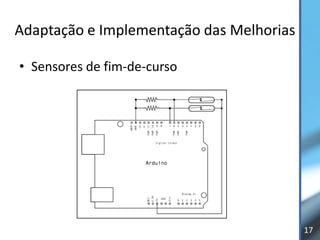

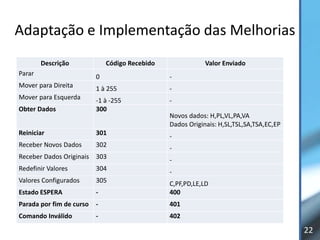
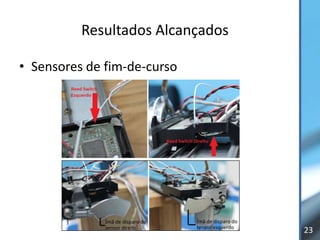
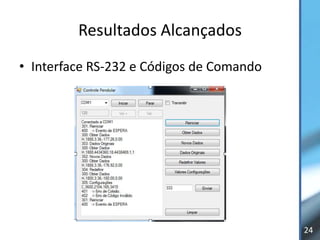
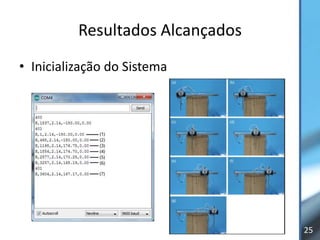
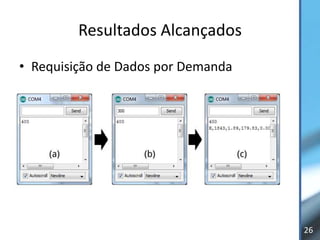

O documento discute melhorias em um kit educacional de pêndulo invertido, focando na utilização de resíduos eletrônicos para a construção do equipamento e a implementação de sensores e interface de controle. As adaptações realizadas visam aumentar a resistência do kit, melhorar a comunicação de dados e facilitar a interação dos alunos nas aulas de engenharia. Conclui-se que essas melhorias tornam o kit um recurso didático mais eficaz para o ensino de conceitos de controle e sistemas dinâmicos.






















