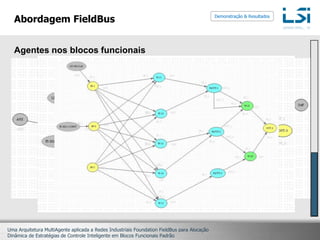
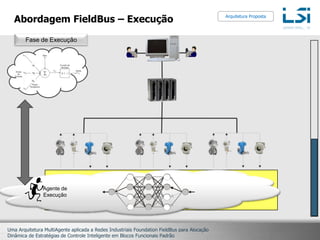
1) O documento descreve uma arquitetura multiagente aplicada a redes industriais Foundation Fieldbus para alocação dinâmica de estratégias de controle inteligente em blocos funcionais padrão.
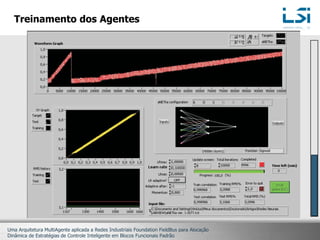
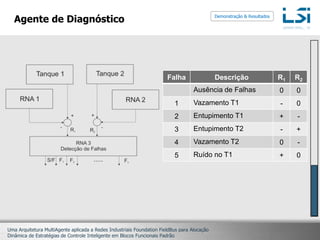
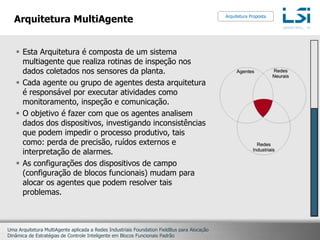
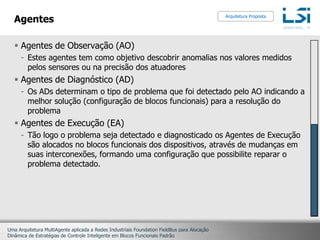
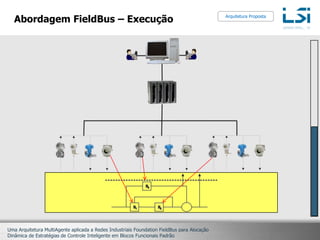
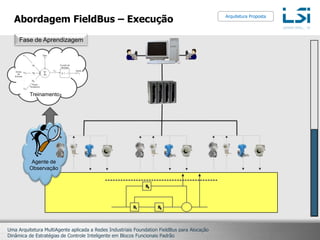
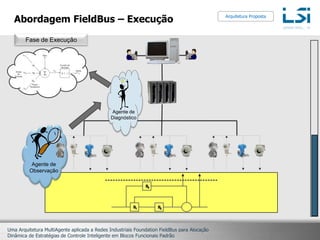
2) A arquitetura propõe o uso de agentes com aprendizado de máquina para detectar e resolver problemas (falhas) nas redes industriais de forma autônoma e adaptativa.
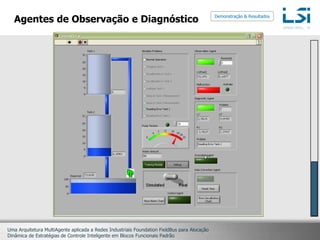
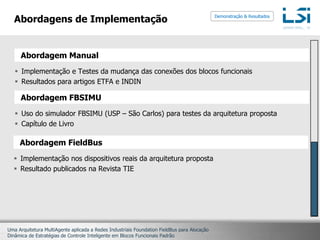
3) A arquitetura é demonstrada através de simulações e implementações reais em dispositivos de campo Foundation Fieldbus.

![AgenteAgente AutônomoParadigma para o desenvolvimento de aplicações de software.Entidade computacional com um comportamento autônomo que lhe permite decidir suas próprias ações.DefiniçõesÉ uma entidade que percebe o ambiente através de sensores e age neste ambiente através de atuadores, tomando decisões que irão auxiliar a alcançar seu objetivo [Russell & Norvig 2003].É um sistema de computador, situado em algum ambiente, que é capaz de flexibilizarações autônomas a fim de encontrar seus objetivos de desenvolvimento [Woolridge, 2002].Agente autônomo é o que consegue operar com completa autonomia, decidir por si só como relacionar os dados obtidos com ações de modo que seus objetivos sejam atingidos com sucesso[Maes 1995] .Fundamentação TeóricaAdaptaçãoAutonomiaAdaptaçãoAutonomiaAutonomiaAprendizagem](https://image.slidesharecdn.com/labsin-090903085754-phpapp01/85/Apresentacao-LabSIn-7-320.jpg)
![Agentes & Redes IndustriaisTrabalhos RelacionadosEstudo sobre a viabilidade de implementação de agentes em ambiente industrial [Wagner 2002]Estatísticas de uso de dispositivos em ambientes industriais [Landaburu et al. 2002]Camada baseada em agentes para acesso a informações sobre os processos. (Ontologias) [Pirttiojaet al. 2005] e (Web-Semântica) [Jussila 2006]Agentes de Fábrica (PlantAgents). Monitora e controla um único item na planta. [Buse & Wu 2007]Monitoramento e Diagnóstico de processos usando agentes e mapas auto-organizáveis [Frey 2009]Detecção e recuperação de falhas usando agente em ambientes fieldbus. [Stefano & Santoro 2009]](https://image.slidesharecdn.com/labsin-090903085754-phpapp01/85/Apresentacao-LabSIn-14-320.jpg)
![Agentes & Redes NeuraisTrabalhos RelacionadosAgentes para reconhecimento de padrões utilizando redes neurais como parte de um sistema de navegação [Cunha 1997]Modelo e agentes para detecção de invasão em redes de computadores. Utiliza redes neurais para categorizar os comportamentos dos usuários [Shelestovet al. 2003]Agentes móveis que "combinam "conhecimento adquirido através de redes Neurais [Badawy & Almotwaly 2004]Agentes Baseados em Redes Neurais para predição de estoques [Xu & Shao 2008]](https://image.slidesharecdn.com/labsin-090903085754-phpapp01/85/Apresentacao-LabSIn-15-320.jpg)
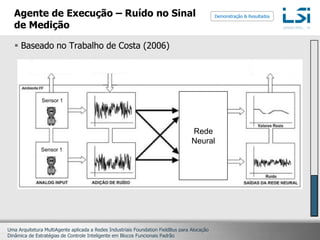
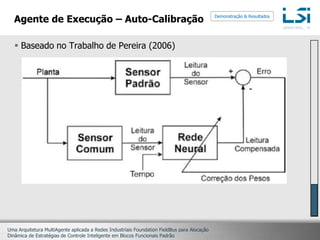
![Redes Neurais & Redes IndustriaisTrabalhos RelacionadosImplementação em Ambiente FoundationFieldbus de Filtragem Estocástica [Costa 2005]Auto-Compensação e Auto-Calibração [Cagni 2005] Redes neurais artificiais no ambiente de redes industriais Foundation Fieldbususandoblocosfuncionais Padrões [Silva et al. 2006]Predição usando Redes Neurais [Medeiros 2009]](https://image.slidesharecdn.com/labsin-090903085754-phpapp01/85/Apresentacao-LabSIn-16-320.jpg)

![Resultado publicados na Revista TIEAbordagem FieldBusDemonstração & ResultadosUso de dispositivos reais (planta didática – LAMP)Agentes implementados em LabView [Polaków & Metzger 2007]](https://image.slidesharecdn.com/labsin-090903085754-phpapp01/85/Apresentacao-LabSIn-27-320.jpg)