Baixado 42 vezes


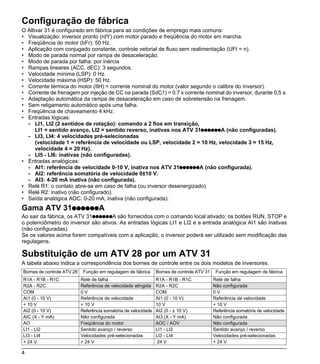

1. O documento fornece instruções para a instalação, configuração e operação do inversor de frequência Altivar 31 para motores assíncronos. 2. Inclui recomendações preliminares, etapas de colocação em funcionamento, configuração de fábrica, compatibilidade eletromagnética e detalhes sobre menus, parâmetros e falhas. 3. O documento destaca a importância de seguir normas de segurança, realizar aterramentos corretos e usar cabos blindados para assegurar a compatibilidade





![[E-BOOK 3] - Comandos Elétricos 3.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/e-book3-comandoseltricos3-230731223143-b56b455f-thumbnail.jpg?width=640&height=640&fit=bounds)