Baixado 10 vezes







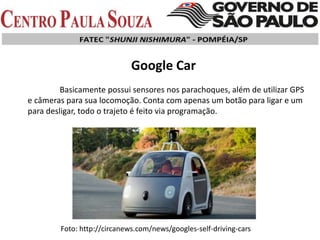

A visão computacional pode ser usada para navegação de veículos autônomos na agricultura, como projetos de pulverizador (JAV), plataforma robótica (Agribot) e trator (ANTs Valtra) que usam câmeras e sensores para se locomover e coletar dados sem um operador. A visão computacional analisa imagens para navegação e obtenção de informações sobre culturas.














