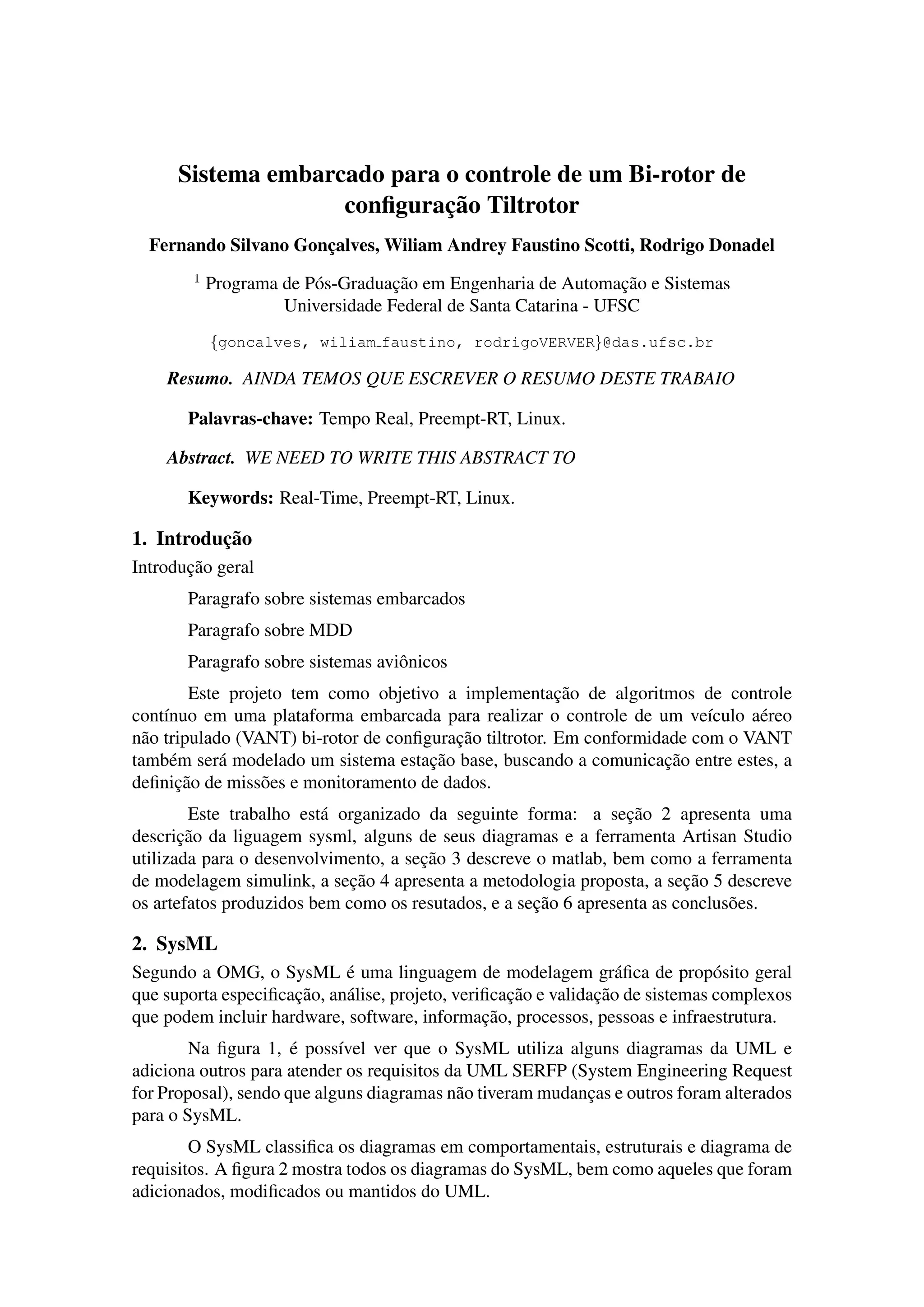
Este documento descreve o desenvolvimento de um sistema embarcado para controlar um veículo aéreo não tripulado (VANT) bi-rotor utilizando técnicas de modelagem. A metodologia proposta utiliza o MATLAB/Simulink para simular e validar algoritmos de controle, SysML para modelar a arquitetura de software e hardware, e mapeamento do modelo SysML para código de implementação na plataforma embarcada. O trabalho ainda está em desenvolvimento, faltando detalhar mais a metodologia e apresentar resultados.




















![[Hind oopsla00] resumo do artigo "Adaptive Optimization in the Jikes RVM"](https://cdn.slidesharecdn.com/ss_thumbnails/hindoopsla00resumo-120304201713-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)













































