Transfira gratuitamente durante 30 dias
Fazer login
Carregar
Idioma (PT)
Suporte
Negócios
Celular
Mídias sociais
Marketing
Tecnologia
Arte e fotografia
Carreiras
Design
Educação
Apresentações e oratória
Governo e ONGs
Saúde
Internet
Direito
Liderança e gerenciamento
Indústria automotiva
Engenharia
Software
Recrutamento e RH
Varejo
Vendas
Serviços
Ciências
Pequenos negócios e empreendedorismo
Alimentos
Meio ambiente
Economia e finanças
Dados e análise
Relação com investidores
Esportes
Espiritual
Notícias e política
Turismo
Aperfeiçoamento pessoal
Imóveis
Diversão e humor
Saúde e medicina
Dispositivos e hardware
Estilo de vida
Mudar o idioma
Idioma
English
Español
Português
Français
Deutsche
Cancelar
Salvar
Enviar pesquisa
PT
Carregado por
vandilberto4
PPTX, PDF
7 visualizações
PPTs - Capítulo 11_ Modelagem paramétrica de sinais.pptx
Modelagem paramétrica de sinais
Engenharia
◦
Leia mais
0
Salvar
Compartilhar
Incorporar
Incorporar apresentação
Baixar
Baixar para ler offline
1
/ 33
2
/ 33
3
/ 33
4
/ 33
5
/ 33
6
/ 33
7
/ 33
8
/ 33
9
/ 33
10
/ 33
11
/ 33
12
/ 33
13
/ 33
14
/ 33
15
/ 33
16
/ 33
17
/ 33
18
/ 33
19
/ 33
20
/ 33
21
/ 33
22
/ 33
23
/ 33
24
/ 33
25
/ 33
26
/ 33
27
/ 33
28
/ 33
29
/ 33
30
/ 33
31
/ 33
32
/ 33
33
/ 33
Mais conteúdo relacionado
PPTX
Teoria de estimação
por
Manuel Vargas
PPTX
PCom_aula_2_2020 vetores para ensino .pptx
por
DarkSub
PPTX
Principios da comunicação , vetores e suas definições
por
MatheusFreitaskuhn1
PPTX
FT_Aula_02_2022.pptx
por
EdmilsonBorges12
PPTX
PCom_aula_8_2020.pptx é da engenharia eletrica
por
tomazmanoel1
PDF
Kalman Filter - Video tracking Talk at IME-USP
por
Jorge Leandro
PDF
Capítulo V Densidade espectral de potências
por
ruyribeiro6
PDF
05453943
por
govt.college of engineering,dharmapuri
Teoria de estimação
por
Manuel Vargas
PCom_aula_2_2020 vetores para ensino .pptx
por
DarkSub
Principios da comunicação , vetores e suas definições
por
MatheusFreitaskuhn1
FT_Aula_02_2022.pptx
por
EdmilsonBorges12
PCom_aula_8_2020.pptx é da engenharia eletrica
por
tomazmanoel1
Kalman Filter - Video tracking Talk at IME-USP
por
Jorge Leandro
Capítulo V Densidade espectral de potências
por
ruyribeiro6
05453943
por
govt.college of engineering,dharmapuri
Destaque
PDF
2024 Trend Updates: What Really Works In SEO & Content Marketing
por
Search Engine Journal
PDF
Storytelling For The Web: Integrate Storytelling in your Design Process
por
Chiara Aliotta
PDF
Artificial Intelligence, Data and Competition – SCHREPEL – June 2024 OECD dis...
por
OECD Directorate for Financial and Enterprise Affairs
PDF
How to Leverage AI to Boost Employee Wellness - Lydia Di Francesco - SocialHR...
por
SocialHRCamp
PDF
2024 State of Marketing Report – by Hubspot
por
Marius Sescu
PDF
Everything You Need To Know About ChatGPT
por
Expeed Software
PDF
Product Design Trends in 2024 | Teenage Engineerings
por
Pixeldarts
PDF
How Race, Age and Gender Shape Attitudes Towards Mental Health
por
ThinkNow
PDF
AI Trends in Creative Operations 2024 by Artwork Flow.pdf
por
marketingartwork
PDF
Skeleton Culture Code
por
Skeleton Technologies
PDF
PEPSICO Presentation to CAGNY Conference Feb 2024
por
Neil Kimberley
PDF
Content Methodology: A Best Practices Report (Webinar)
por
contently
PPTX
How to Prepare For a Successful Job Search for 2024
por
Albert Qian
PDF
Social Media Marketing Trends 2024 // The Global Indie Insights
por
Kurio // The Social Media Age(ncy)
PDF
Trends In Paid Search: Navigating The Digital Landscape In 2024
por
Search Engine Journal
PDF
5 Public speaking tips from TED - Visualized summary
por
SpeakerHub
PDF
ChatGPT and the Future of Work - Clark Boyd
por
Clark Boyd
PDF
Getting into the tech field. what next
por
Tessa Mero
PDF
Google's Just Not That Into You: Understanding Core Updates & Search Intent
por
Lily Ray
PDF
How to have difficult conversations
por
Rajiv Jayarajah, MAppComm, ACC
2024 Trend Updates: What Really Works In SEO & Content Marketing
por
Search Engine Journal
Storytelling For The Web: Integrate Storytelling in your Design Process
por
Chiara Aliotta
Artificial Intelligence, Data and Competition – SCHREPEL – June 2024 OECD dis...
por
OECD Directorate for Financial and Enterprise Affairs
How to Leverage AI to Boost Employee Wellness - Lydia Di Francesco - SocialHR...
por
SocialHRCamp
2024 State of Marketing Report – by Hubspot
por
Marius Sescu
Everything You Need To Know About ChatGPT
por
Expeed Software
Product Design Trends in 2024 | Teenage Engineerings
por
Pixeldarts
How Race, Age and Gender Shape Attitudes Towards Mental Health
por
ThinkNow
AI Trends in Creative Operations 2024 by Artwork Flow.pdf
por
marketingartwork
Skeleton Culture Code
por
Skeleton Technologies
PEPSICO Presentation to CAGNY Conference Feb 2024
por
Neil Kimberley
Content Methodology: A Best Practices Report (Webinar)
por
contently
How to Prepare For a Successful Job Search for 2024
por
Albert Qian
Social Media Marketing Trends 2024 // The Global Indie Insights
por
Kurio // The Social Media Age(ncy)
Trends In Paid Search: Navigating The Digital Landscape In 2024
por
Search Engine Journal
5 Public speaking tips from TED - Visualized summary
por
SpeakerHub
ChatGPT and the Future of Work - Clark Boyd
por
Clark Boyd
Getting into the tech field. what next
por
Tessa Mero
Google's Just Not That Into You: Understanding Core Updates & Search Intent
por
Lily Ray
How to have difficult conversations
por
Rajiv Jayarajah, MAppComm, ACC
PPTs - Capítulo 11_ Modelagem paramétrica de sinais.pptx
1.
© 2013 Pearson.
Todos os direitos reservados. slide 1 Capítulo 11 Modelagem paramétrica de sinais
2.
© 2013 Pearson.
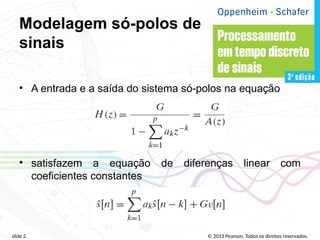
Todos os direitos reservados. slide 2 Modelagem só-polos de sinais • A entrada e a saída do sistema só-polos na equação • satisfazem a equação de diferenças linear com coeficientes constantes
3.
© 2013 Pearson.
Todos os direitos reservados. slide 3 Modelo inverso por mínimos quadrados • Uma formulação baseada em filtragem inversa fornece uma solução relativamente simples e tratável para os valores de parâmetros no modelo só-polos. • A técnica de filtragem inversa é baseada no reconhecimento de que, se o sinal dado s[n] de fato for a saída do filtro H(z), então, sendo s[n] a entrada do inverso de H(z), a saída será u[n].
4.
© 2013 Pearson.
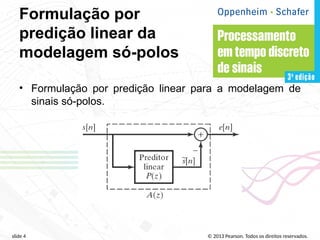
Todos os direitos reservados. slide 4 Formulação por predição linear da modelagem só-polos • Formulação por predição linear para a modelagem de sinais só-polos.
5.
© 2013 Pearson.
Todos os direitos reservados. slide 5 Modelagem só-polos dos sinais determinísticos com energia finita • Escolhemos o operador como a energia total na sequência de erro de modelagem, isto é, • Com essa definição do operador média, fss[i, k] é dada por
6.
© 2013 Pearson.
Todos os direitos reservados. slide 6 Modelagem só-polos dos sinais determinísticos com energia finita • para sinais reais s[n], rss[m] é a função de autocorrelação determinística • Portanto,
7.
© 2013 Pearson.
Todos os direitos reservados. slide 7 Modelagem de sinais aleatórios • Modelo de sistema linear para um sinal aleatório s[n]. • A equação de diferenças para esse sistema é
8.
© 2013 Pearson.
Todos os direitos reservados. slide 8 Erro quadrático médio mínimo • A equação • é verdadeira para qualquer escolha apropriada do operador média. • Em particular, para definições de média para as quais fss[i, k] = rss[i − k], a equação acima torna-se
9.
© 2013 Pearson.
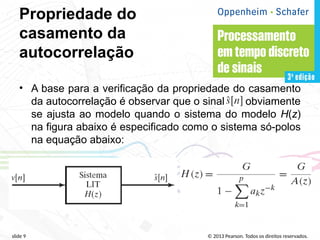
Todos os direitos reservados. slide 9 Propriedade do casamento da autocorrelação • A base para a verificação da propriedade do casamento da autocorrelação é observar que o sinal obviamente se ajusta ao modelo quando o sistema do modelo H(z) na figura abaixo é especificado como o sistema só-polos na equação abaixo:
10.
© 2013 Pearson.
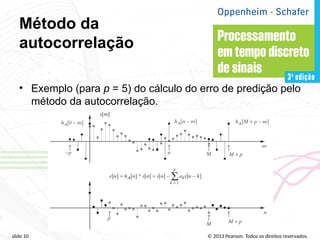
Todos os direitos reservados. slide 10 Método da autocorrelação • Exemplo (para p = 5) do cálculo do erro de predição pelo método da autocorrelação.
11.
© 2013 Pearson.
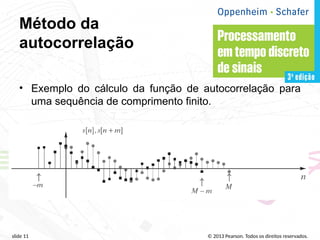
Todos os direitos reservados. slide 11 Método da autocorrelação • Exemplo do cálculo da função de autocorrelação para uma sequência de comprimento finito.
12.
© 2013 Pearson.
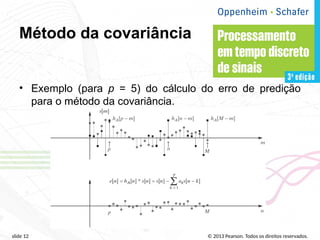
Todos os direitos reservados. slide 12 Método da covariância • Exemplo (para p = 5) do cálculo do erro de predição para o método da covariância.
13.
© 2013 Pearson.
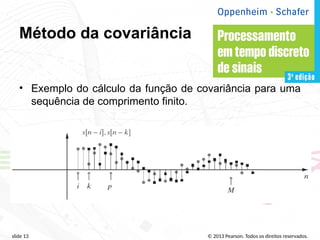
Todos os direitos reservados. slide 13 Método da covariância • Exemplo do cálculo da função de covariância para uma sequência de comprimento finito.
14.
© 2013 Pearson.
Todos os direitos reservados. slide 14 Ordem do modelo • Uma técnica comum para a escolha de p consiste em examinar o erro de predição médio a partir do modelo ótimo de ordem p. A energia do erro de predição para o modelo de ordem p que usa o método da autocorrelação é • Para p = 0,
15.
© 2013 Pearson.
Todos os direitos reservados. slide 15 Análise de espectro só- polos • Se os dados se ajustam ao modelo, então um segmento finito dos dados pode ser usado para determinar os parâmetros do modelo e também seu espectro. • Tanto para o caso determinístico quanto para o caso aleatório, a estimativa de espectro toma a forma
16.
© 2013 Pearson.
Todos os direitos reservados. slide 16 Análise só-polos de sinais de voz • Na figura abaixo é mostrado um segmento de 201 pontos obtido pelo janelamento usando uma janela de Hamming de um sinal de voz s[n].
17.
© 2013 Pearson.
Todos os direitos reservados. slide 17 Análise só-polos de sinais de voz • Na figura abaixo é mostrada a função de autocorrelação correspondente rss[m].
18.
© 2013 Pearson.
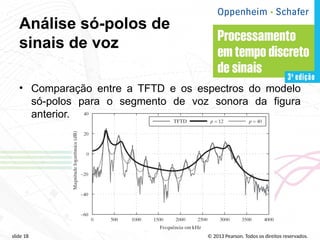
Todos os direitos reservados. slide 18 Análise só-polos de sinais de voz • Comparação entre a TFTD e os espectros do modelo só-polos para o segmento de voz sonora da figura anterior.
19.
© 2013 Pearson.
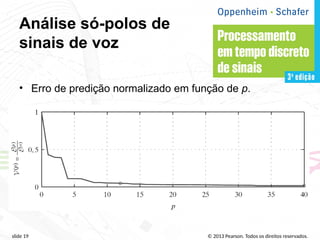
Todos os direitos reservados. slide 19 Análise só-polos de sinais de voz • Erro de predição normalizado em função de p.
20.
© 2013 Pearson.
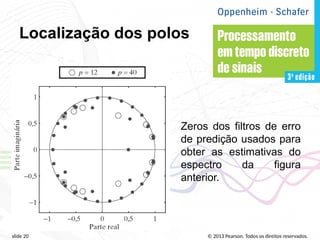
Todos os direitos reservados. slide 20 Localização dos polos Zeros dos filtros de erro de predição usados para obter as estimativas do espectro da figura anterior.
21.
© 2013 Pearson.
Todos os direitos reservados. slide 21 Modelagem só-polos dos sinais senoidais • Consideramos o uso dos polos de um modelo só-polos para estimar frequências de sinais senoidais. Considere a soma de duas senoides
22.
© 2013 Pearson.
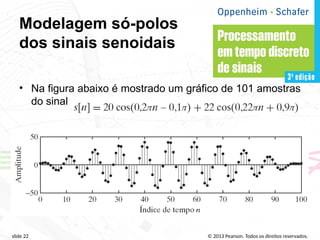
Todos os direitos reservados. slide 22 Modelagem só-polos dos sinais senoidais • Na figura abaixo é mostrado um gráfico de 101 amostras do sinal
23.
© 2013 Pearson.
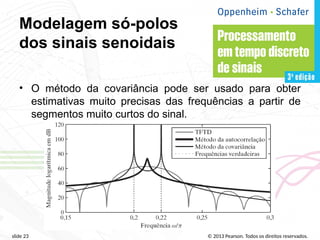
Todos os direitos reservados. slide 23 Modelagem só-polos dos sinais senoidais • O método da covariância pode ser usado para obter estimativas muito precisas das frequências a partir de segmentos muito curtos do sinal.
24.
© 2013 Pearson.
Todos os direitos reservados. slide 24 Solução das equações normais da autocorrelação • No caso específico do método da autocorrelação ou em qualquer método para o qual fss[i, k] = rss[|i − k|], as equações normais da autocorrelação são
25.
© 2013 Pearson.
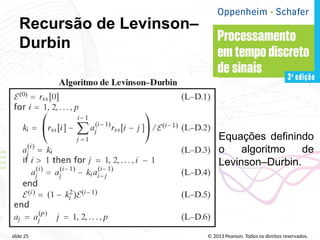
Todos os direitos reservados. slide 25 Recursão de Levinson– Durbin Equações definindo o algoritmo de Levinson–Durbin.
26.
© 2013 Pearson.
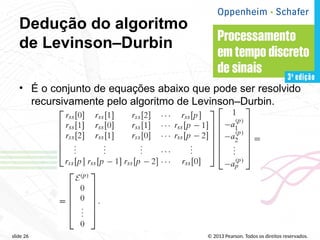
Todos os direitos reservados. slide 26 Dedução do algoritmo de Levinson–Durbin • É o conjunto de equações abaixo que pode ser resolvido recursivamente pelo algoritmo de Levinson–Durbin.
27.
© 2013 Pearson.
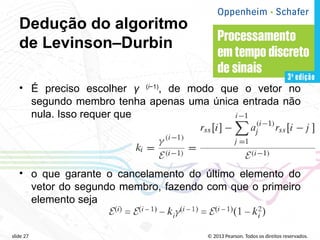
Todos os direitos reservados. slide 27 Dedução do algoritmo de Levinson–Durbin • É preciso escolher γ (i−1) , de modo que o vetor no segundo membro tenha apenas uma única entrada não nula. Isso requer que • o que garante o cancelamento do último elemento do vetor do segundo membro, fazendo com que o primeiro elemento seja
28.
© 2013 Pearson.
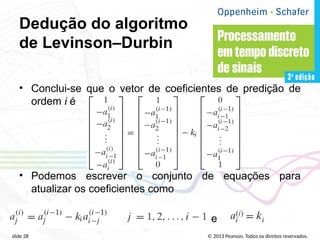
Todos os direitos reservados. slide 28 Dedução do algoritmo de Levinson–Durbin • Conclui-se que o vetor de coeficientes de predição de ordem i é • Podemos escrever o conjunto de equações para atualizar os coeficientes como e
29.
© 2013 Pearson.
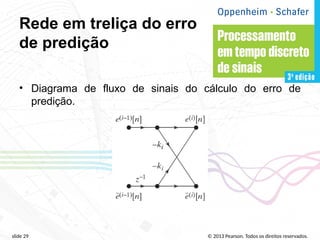
Todos os direitos reservados. slide 29 Rede em treliça do erro de predição • Diagrama de fluxo de sinais do cálculo do erro de predição.
30.
© 2013 Pearson.
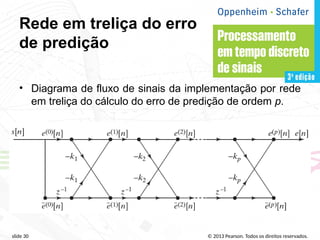
Todos os direitos reservados. slide 30 Rede em treliça do erro de predição • Diagrama de fluxo de sinais da implementação por rede em treliça do cálculo do erro de predição de ordem p.
31.
© 2013 Pearson.
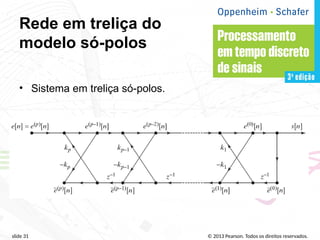
Todos os direitos reservados. slide 31 Rede em treliça do modelo só-polos • Sistema em treliça só-polos.
32.
© 2013 Pearson.
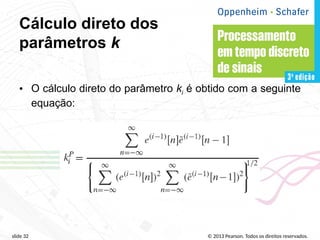
Todos os direitos reservados. slide 32 Cálculo direto dos parâmetros k • O cálculo direto do parâmetro ki é obtido com a seguinte equação:
33.
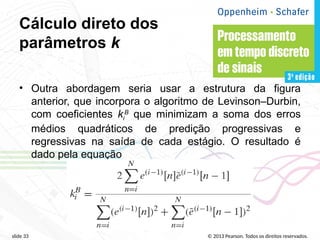
© 2013 Pearson.
Todos os direitos reservados. slide 33 Cálculo direto dos parâmetros k • Outra abordagem seria usar a estrutura da figura anterior, que incorpora o algoritmo de Levinson–Durbin, com coeficientes ki B que minimizam a soma dos erros médios quadráticos de predição progressivas e regressivas na saída de cada estágio. O resultado é dado pela equação
Baixar

![© 2013 Pearson. Todos os direitos reservados.
slide 3
Modelo inverso por
mínimos quadrados
• Uma formulação baseada em filtragem inversa fornece
uma solução relativamente simples e tratável para os
valores de parâmetros no modelo só-polos.
• A técnica de filtragem inversa é baseada no
reconhecimento de que, se o sinal dado s[n] de fato for a
saída do filtro H(z), então, sendo s[n] a entrada do
inverso de H(z), a saída será u[n].](https://image.slidesharecdn.com/ppts-captulo11modelagemparamtricadesinais-250408132926-4b8c21bf/85/PPTs-Capitulo-11_-Modelagem-parametrica-de-sinais-pptx-3-320.jpg)
![© 2013 Pearson. Todos os direitos reservados.
slide 5
Modelagem só-polos dos
sinais determinísticos com
energia finita
• Escolhemos o operador como a energia total na
sequência de erro de modelagem, isto é,
• Com essa definição do operador média, fss[i, k] é dada
por](https://image.slidesharecdn.com/ppts-captulo11modelagemparamtricadesinais-250408132926-4b8c21bf/85/PPTs-Capitulo-11_-Modelagem-parametrica-de-sinais-pptx-5-320.jpg)
![© 2013 Pearson. Todos os direitos reservados.
slide 6
Modelagem só-polos dos
sinais determinísticos com
energia finita
• para sinais reais s[n], rss[m] é a função de autocorrelação
determinística
• Portanto,](https://image.slidesharecdn.com/ppts-captulo11modelagemparamtricadesinais-250408132926-4b8c21bf/85/PPTs-Capitulo-11_-Modelagem-parametrica-de-sinais-pptx-6-320.jpg)
![© 2013 Pearson. Todos os direitos reservados.
slide 7
Modelagem de sinais
aleatórios
• Modelo de sistema linear para um sinal aleatório s[n].
• A equação de diferenças para esse sistema é](https://image.slidesharecdn.com/ppts-captulo11modelagemparamtricadesinais-250408132926-4b8c21bf/85/PPTs-Capitulo-11_-Modelagem-parametrica-de-sinais-pptx-7-320.jpg)
![© 2013 Pearson. Todos os direitos reservados.
slide 8
Erro quadrático médio
mínimo
• A equação
• é verdadeira para qualquer escolha apropriada do
operador média.
• Em particular, para definições de média para as quais
fss[i, k] = rss[i − k], a equação acima torna-se](https://image.slidesharecdn.com/ppts-captulo11modelagemparamtricadesinais-250408132926-4b8c21bf/85/PPTs-Capitulo-11_-Modelagem-parametrica-de-sinais-pptx-8-320.jpg)
![© 2013 Pearson. Todos os direitos reservados.
slide 16
Análise só-polos de
sinais de voz
• Na figura abaixo é mostrado um segmento de 201
pontos obtido pelo janelamento usando uma janela de
Hamming de um sinal de voz s[n].](https://image.slidesharecdn.com/ppts-captulo11modelagemparamtricadesinais-250408132926-4b8c21bf/85/PPTs-Capitulo-11_-Modelagem-parametrica-de-sinais-pptx-16-320.jpg)
![© 2013 Pearson. Todos os direitos reservados.
slide 17
Análise só-polos de
sinais de voz
• Na figura abaixo é mostrada a função de autocorrelação
correspondente rss[m].](https://image.slidesharecdn.com/ppts-captulo11modelagemparamtricadesinais-250408132926-4b8c21bf/85/PPTs-Capitulo-11_-Modelagem-parametrica-de-sinais-pptx-17-320.jpg)
![© 2013 Pearson. Todos os direitos reservados.
slide 24
Solução das equações
normais da
autocorrelação
• No caso específico do método da autocorrelação ou em
qualquer método para o qual fss[i, k] = rss[|i − k|], as
equações normais da autocorrelação são](https://image.slidesharecdn.com/ppts-captulo11modelagemparamtricadesinais-250408132926-4b8c21bf/85/PPTs-Capitulo-11_-Modelagem-parametrica-de-sinais-pptx-24-320.jpg)