Baixado 43 vezes






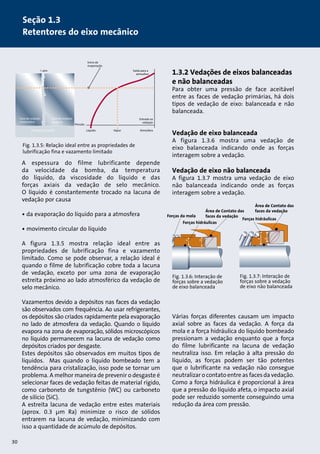
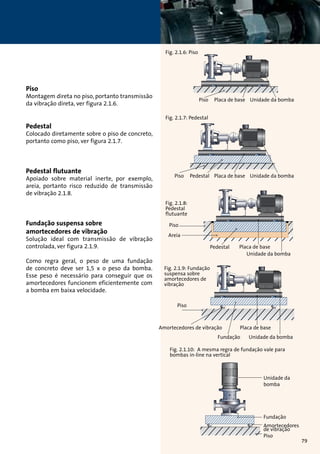
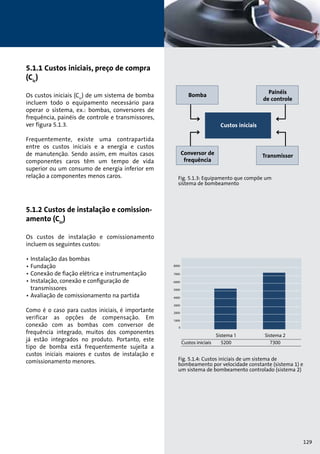
![Seção 1.1
Construção da bomba
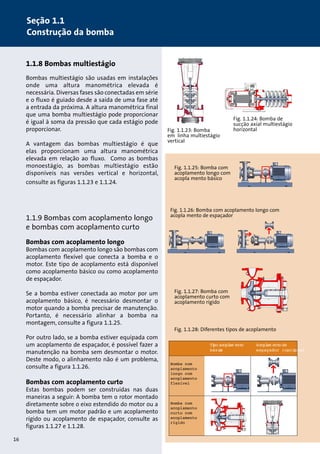
1.1.1 Bomba centrífuga
Em 1689, o físico Denis Papin inventou a bomba
centrífuga e este tipo de bomba é o mais usado ao
redor do mundo. A bomba centrífuga é construída
sobre um princípio simples: O líquido é levado
até o cubo do rotor e, através da força centrífuga,
ele é lançado na direção da periferia dos rotores.
A construção é razoavelmente barata, robusta e
simples e sua alta velocidade possibilita conectar
a bomba diretamente a um motor assíncrono.
A bomba centrífuga oferece um fluxo de líquido
uniforme e pode facilmente ser acelerado sem
causar danos a bomba.
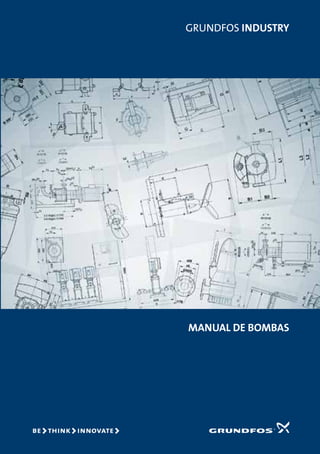
Agora, vamos observar a figura 1.1.1, que mostra
o fluxo do líquido através da bomba. A entrada
da bomba leva o líquido para o centro do rotor
giratório de onde é lançado para a periferia. Esta
construção oferece alta eficiência e é apropriada
para lidar com líquidos puros. As bombas, que têm
que lidar com líquidos impuros, como bombas
de efluentes, são equipadas com um rotor que é
construído especialmente para evitar que objetos
fiquem armazenados no interior da bomba,
consulte a seção 1.2.5.
Se ocorrer diferença de pressão no sistema enquanto
a bomba centrífuga não estiver funcionando, o
líquido ainda consegue passar através da mesma
devido ao seu desenho aberto.
Como se pode ver na figura 1.1.2, a bomba centrífuga
pode ser classificada em diferentes grupos: Bombas
de fluxo radial, bombas de fluxo misto e bombas de
fluxo axial. As bombas de fluxos radial e as bombas
de fluxo misto são os tipos mais comuns utilizados.
Portanto, iremos nos concentrar somente nestes tipos
de bombas nas próximas páginas.
Entretanto, apresentaremos brevemente a bomba
de deslocamento positivo na seção 1.2.8.
As diferentes exigências de desempenho das
bombas centrífugas, especialmente em relação à
altura manométrica total, fluxo e instalação,
junto com as exigências de operação econômica,
são somente algumas das razões porque existem
tantos tipos de bombas. A Figura 1.1.3 mostra os
diferentes tipos de bombas em relação ao fluxo e
pressão.
Fig. 1.1.1: O fluxo do líquido através da bomba
Bomba de fluxo radial Bomba de fluxo misto Bomba de fluxo axial
Fig. 1.1.2: Diferentes tipos de bombas centrífugas
H [m]
1 2
10000
6
4
2
1000
6
4
2
100
6
4
2
10
6
4
2
4
6
Bombas de fluxo radial
multiestágios
Bombas de
fluxo radial
monoestágios
10
Bombas de fluxo misto
Bombas de fluxo axial
2 46 100 2 46 10002 46 10000 100000
Q [m3/h]
Fig. 1.1.3: Fluxo e altura manométrica total para
diferentes tipos de bombas centrífugas
8](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-9-320.jpg)
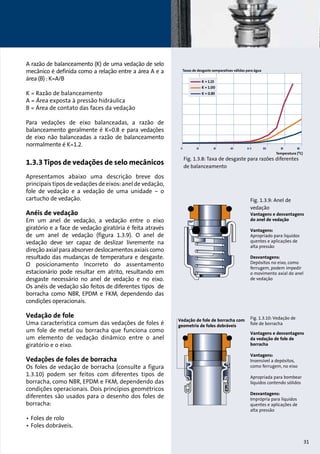
![1.1.2 Curvas das bombas
Antes de aprofundarmos no mundo da construção e
tipos de bombas apresentaremos as características
básicas das curvas de desempenho das bombas. O
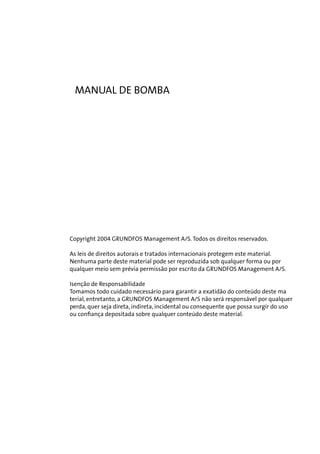
desempenho de uma bomba centrífuga é mostrado
por um conjunto de curvas de desempenho. As
curvas de desempenho para uma bomba centrífuga
são mostradas na figura 1.1.4. Altura manométrica
total, consumo de energia, eficiência de consumo
e NPSH são mostrados como uma função no fluxo.
Normalmente, as curvas das bombas nas apostilas de
dados cobrem somente a parte da bomba. Portanto,
o consumo de energia, o valor P2 que também está
listado nas apostilas de dados, cobre somente a
energia que entra na bomba – consulte a figura
1.1.4. O mesmo vale para o valor eficiência, que cobre
somente a parte da bomba (η = ηP).
Em alguns tipos de bombas com motor integrado e
conversor de frequência possivelmente integrado,
por exemplo, bombas com motor blindado (consulte
a seção 1.2.3), a curva de consumo de energia e a
curva η cobrem o motor e a bomba. Neste caso, é o
valor P1 que deve ser levado em consideração.
No geral, as curvss das bombas são projetadas de acordo
com o ISO 9906 Anexo A, que especifica as tolerâncias
das curvas:
• Q +/- 9%,
• H +/-7%,
• P +9%
• -7%.
Mostramos a seguir uma breve apresentação das
diferentes curvas de desempenho de bombas.
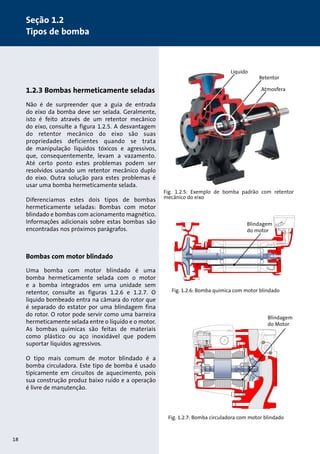
Altura manométrica total, a curva QH
A curva QH mostra a altura manométrica total, que
a bomba é capaz de executar em um determinado
fluxo. A altura manométrica total é medida em metros
de coluna de líquido/metros [mLC]; normalmente a
unidade metro [m] é aplicada. A vantagem de se usar
a unidade [m] como unidade de medida da altura
manométrica total da bomba é que a curva QH não
é afetada pelo tipo de líquido que bomba tem que
manejar, consulte a seção 2.2 para mais informações.
H
[m]
η
[%]
50
40
70
Eficiência
60
50
40
30
20
10
0
12
10
8
6
4
2
30
20
10
0
0 10 20 30 40 50 60 70 Q [m 3/h]
P2
[kW]
10
8
6
4
2
0
NPSH
(m)
Consum o de energia
NPSH
Fig. 1.1.4: Curvas de desempenho típicas para
uma bomba centrífuga. Altura manométrica
total, consumo de energia, eficiência e NPSH são
mostrados como uma função do fluxo
Q
P1 M P2 H
3~
ηM ηP
Fig. 1.1.5: As curvas para consumo de energia e
eficiência normalmente cobrem somente a parte
da bomba da unidade – i.e. P2 e ηP
H
[m]
60
50
40
30
20
10
0
0 10 20 30 40 50 60 70 80 Q [m3/h
Fig. 1.1.6: Curva QH típica para uma bomba
centrífuga; fluxo baixo resulta em altura
manométrica total alta e fluxo alto resulta em
altura manométrica total baixa
9](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-10-320.jpg)
![Eficiência, a curva η
A eficiência é a relação entre a energia fornecida e
a quantidade de energia utilizada. No mundo das
bombas, a eficiência ηP é a relação entre a energia,
que a bomba fornece para a água (PH) e a entrada
de energia no eixo (P2):
onde:
ρ é a densidade do líquido em kg/m3,
g é a aceleração da gravidade em m/s2,
Q é o fluxo em m3/h e H é a altura manométrica
total em m.
Para água a 20oC e com Q medido em m3/h e H em
m, a energia hidráulica pode ser calculada como:
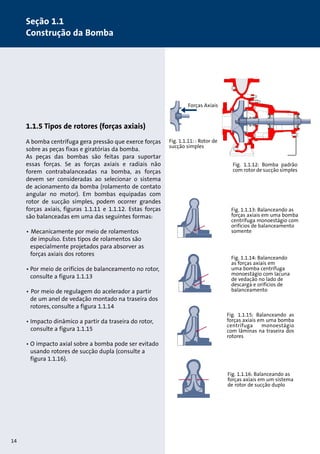
Como aparece a partir da curva de eficiência, a
eficiência depende do ponto de operação da bomba.
Portanto, é importante selecionar uma bomba que
seja compatível com os requisitos de fluxo e que
assegure que a bomba esteja funcionando na área
de fluxo mais eficiente.
Consumo de energia, a curva P2
A relação entre o consumo de energia da bomba
e o fluxo é mostrada na figura 1.1.8. A curva P2
da maioria das bombas centrífugas é semelhante
à curva na figura 1.1.8 onde o valor P2 aumenta
quando o fluxo aumenta.
Curva NPSH (Altura Manométrica de Sucção
Positiva Líquida)
O valor NPSH de uma bomba é a pressão mínima
absoluta (consulte a seção 2.2.1) que deve estar
presente no lado de sucção da bomba para evitar
cavitação. O valor NPSH é medido em [m] e
depende do fluxo; quando o fluxo aumenta, o valor
NPSH também aumenta; figura 1.1.9. Para mais
informações sobre cavitação e NPSH, vá para a
seção 2.2.1.
η
[%]
80
70
60
50
40
30
20
10
0
0 10 20 30 40 50 60 70 Q [m 3/h]
Fig. 1.1.7: Curva de eficiência de uma bomba
centrífuga típica
P2
[kW]
10
8
6
4
2
0
0 10 20 30 40 50 60 70 Q [m 3/h]
Fig. 1.1.8: Curva de consumo de energia de uma
bomba centrífuga típica
NPSH
[m]
10
8
6
4
2
0
0 10 20 30 40 50 60 70 Q [m 3/h]
ηp =
PH
P2
=
ρ . g . Q . H
P2 x 3600
Fig. 1.1.9: Curva NPSH de bomba centrífuga
típica
PH = 2.72 . Q . H [W]
10
Seção 1.1
Construção da bomba
= Q . H . g .ρ
3600 x ηp
P2](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-11-320.jpg)




![Fig. 1.2.10: Bomba sanitária
Fig.1.2.11: Bomba sanitária com canal lateral de
auto-escorvamento
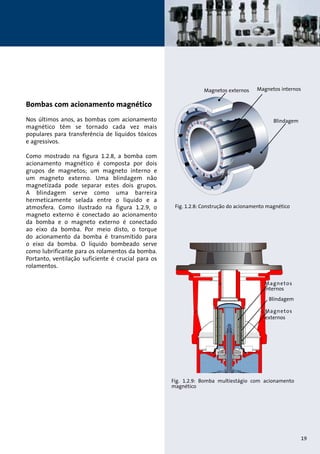
1.2.4 Bombas sanitárias
As bombas sanitárias são usadas principalmente
por indústrias de alimentos, bebidas, farmacêuticas
e de biotecnologia onde é muito importante que o
líquido bombeado seja manipulado suavemente e
que as bombas sejam fáceis de limpar.
Para atender as exigências de processamento
destas indústrias, as bombas devem ter uma
superfície áspera entre 3,2 e 0,4 μm Ra. Isto pode
ser melhor obtido usando aço inoxidável forjado
ou laminado rolado como materiais de construção,
consulte a figura 1.2.12. Estes materiais possuem
uma superfície compacta não porosa que pode
ser facilmente trabalhada para atender os vários
requisitos de acabamento de superfície.
As principais características das bombas sanitárias
são facilidade de limpeza e de manutenção.
Os fabricantes líderes de bombas sanitárias
projetaram suas bombas para atender os padrões
a seguir:
EHEDG – [Grupo de Design de Equipamento
Higiênico Europeu]
QHD – [Design Higiênico Qualificado]
3-A – Padrões Sanitários:
3A0/3A1: Padrão Industrial/Higiênico
Ra ≤ 3.2 μm
3A2: Padrão Estéril
Ra ≤ 0.8 μm
3A3: Padrão Estéril
Ra ≤ 0.4 μm
Areia fundida
Fundição de
precisão
Aço rolado
Fig.1.2.12: Aspereza da superfície do material
Seção 1.2
Tipos de bomba
20](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-21-320.jpg)








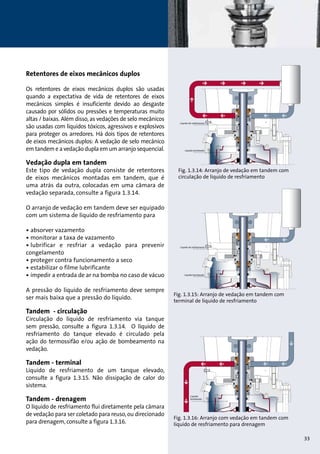
















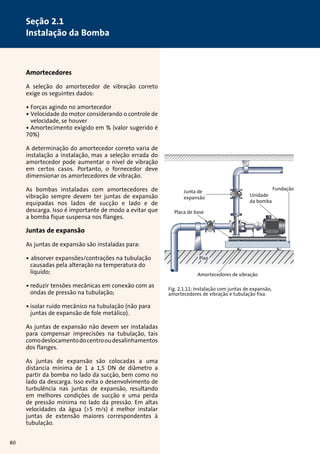
![1.5.2 Liquidos não newtonianos
Os líquidos discutidos até agora são conhecidos
como fluidos newtonianos. A viscosidade de
líquidos newtonianos não é afetada pela magnitude
e a movimento aos quais eles estão expostos. Óleo
mineral e água são exemplos típicos deste tipo de
líquido. Por outro lado, a viscosidade de líquidos
não newtonianos altera quando agitados.
Isso pede alguns exemplos:
• Líquidos dilatantes como creme – a viscosidade
aumenta quando agitado
• Fluidos plásticos como ketchup – tem um limite
de escoamento, o qual tem que ser excedido
antes que o fluxo inicie. Deste ponto em diante a
viscosidade diminui com um aumento na agitação
• Líquidos tixotropico como pintura não gotejante
– apresenta uma viscosidade decrescente com um
aumento na agitação
Os líquidos não newtonianos não estão cobertos
pela fórmula de viscosidade descrita anteriormente
nesta seção.
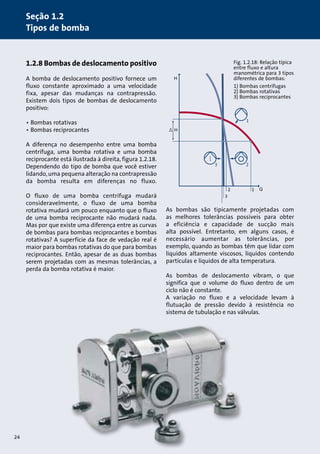
1.5.3 O impacto de líquidos viscosos no
desempenho de uma bomba centrifuga
Líquidos viscosos, que são líquidos com viscosidade
mais alta e/ou maior densidade do que a água,
afetam o desempenho das bombas centrifugas de
diferentes formas:
• Aumenta o consumo de energia, isto é, um
motor maior pode ser exigido para desempenhar a
mesma função
• A eficiência da carga, taxa de fluxo e da bomba são
reduzidas
Vamos dar uma olhada num exemplo. Uma bomba
é usada para bombear um líquido em um sistema
de arrefecimento com uma temperatura de liquido
abaixo de 0°C. Para evitar que o líquido congele
um agente anticongelante como propilenoglicol é
adicionado à água.
Quando glicol ou um agente anticongelante
similar é adicionado ao liquido bombeado,
o liquido obtém as propriedades diferentes
daquelas da água. O liquido terá:
• Ponto de congelamento mais baixo, tf [°C]
• Aquecimento especifico mais baixo, cp [kJ/
kg.K]
• Condutividade térmica mais baixa, λ
[W/m.K]
• Ponto de ebulição mais alto, tb [°C]
• Maior coeficiente de expansão, β [m/°C]
• Maior densidade, ρ [kg/m3]
• Maior viscosidade cinemática, ν [cSt]
Essas propriedades tem que ser mantidas
em mente quando projetando um sistema
e selecionando bombas. Como mencionado
anteriormente, uma maior densidade exige
potencia aumentada do motor e maior
viscosidade reduz a carga e taxa de fluxo
da bomba e a eficiência resulta necessidade
acrescida da potencia do motor, veja figura
1.5.2.
Fig. 1.5.2: Carga alterada, eficiência e entrada de
potencia para o liquido com mais alta viscosidade
55](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-54-320.jpg)
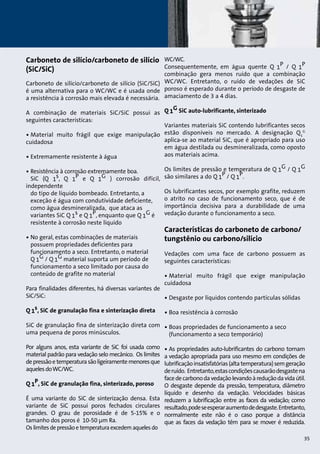
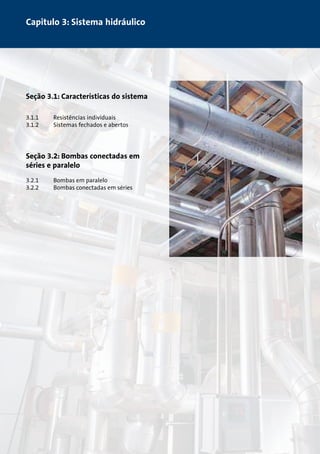
![1.5.4 Seleção da bomba certa para um
líquido anticongelante
As características da bomba normalmente
são baseadas em água a aproximadamente
20°C, isto é, uma viscosidade cinemática de
aproximadamente 1 cSt e uma densidade de
aproximadamente 1.000 kg/m3.
Quando as bombas são usadas para líquidos
contendo anticongelante abaixo de 0°C, é
necessário examinar se a bomba pode fornecer
o desempenho exigido ou se é necessário um
motor maior. A seção a seguir apresenta um
método simplificado usado para determinar as
correções da curva da bomba para bombas num
sistema que tem que lidar com viscosidade entre
5 - 100 cSt e uma densidade de no máximo 1.300
kg/m3. Favor observar que este método não é
tão preciso quanto o método computadorizado
descrito mais adiante nesta seção.
Correções da curva da bomba para bombas
manuseando líquido de alta viscosidade
Baseado no conhecimento sobre o ponto de
funcionamento requisitado, QS, HS, e a viscosidade
cinemática do líquido bombeado, os fatores de
correção de H e P2 podem ser encontrados, ver
figura 1.5.3.
Para obter o fator de correção para bombas
multiestágio, a altura manométrica de um
estágio tem que ser usada.
KH
1.35
1.30
1.25
1.20
1.15
1.10
1.05
1.00
KP2
1.9
1.8
1.7
1.6
1.5
1.4
1.3
1.2
1.1
1.0
0.9
Q [m3/h]
140
130
120
110
100
90
80
70
60
50
40
30
20
10
0
100 cSt
60 cSt
100 cSt
60 cSt
40 cSt
40 cSt
20 cSt
10 cSt
20 cSt
10 cSt
5 cSt
5 cSt
H = 6 m
H = 10 m
H = 20 m
H = 40 m
H = 60 m
Fig. 1.5.3: É possível determinar o fator de correção
para a altura manométrica e consumo de energia
em diferentes valores de fluxo, altura manométrica
e viscosidade.
56
Seção 1.5
Líquidos](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-55-320.jpg)

![1.5.5 Exemplo de cálculo
Uma bomba de circulação num sistema de
refrigeração deve bombear um líquido com 40%
(peso) de propilenoglicol à temperatura de -
10°C. O fluxo desejado é QS = 60 m3/h, e a altura
manométrica) desejada é HS = 12 m. Conhecendo
o ponto de funcionamento desejado é possível
encontrar o QH característico para água e
escolher uma bomba capaz de cobrir o ponto de
funcionamento. Uma vez que determinamos o
tipo de bomba necessário e tamanho, podemos
verificar se a bomba está equipada com um
motor que pode suportar a carga da bomba
específica.
O líquido tem uma viscosidade cinemática de 20
cSt e uma densidade de 1049 kg/m3. Com QS = 60
m3/h, HS = 12 m e ν = 20 cSt, os fatores de correção
podem ser encontrados na figura 1.5.3.
kH = 1.03
kP2 = 1.15
HW = kH · HS = 1.03 · 12 = 12.4 m
QS = 60 m3/h
A bomba tem que ser capaz de cobrir um ponto
de funcionamento equivalente a Q,H = 60 m3/h,
12.4m. Uma vez que o tamanho de bomba
necessário é determinado, o valor P2 para o ponto
de funcionamento é encontrado, o que neste
caso é P2W = 2.9 kW. Agora é possível calcular
a potência do motor necessária para a mistura
propilenoglicol:
O cálculo mostra que a bomba tem que ser
equipada com um motor de 4 kW, que é o menor
tamanho de motor capaz de cobrir o P2S = 3.5 kW
calculado.
1.5.6 Seleção de bomba assistida por
computador para líquidos densos e vis-cosos
Algumas ferramentas de seleção de bomba
assistida por computador incluem um recurso
que compensa para curvas de desempenho da
bomba baseadas na entrada da densidade do
líquido e viscosidade. A figura 1.5.5 mostra as
curvas de desempenho da bomba a partir do
exemplo que acabamos de abordar.
A figura mostra tanto as curvas de desempenho
para a bomba quando ela opera líquido
viscoso (as linhas cheias) quanto as curvas de
desempenho quando ela opera com água (as
linhas interrompidas). Como indicado, a altura
manométrica), fluxo e eficiência são reduzidos,
resultando num aumento do consumo de
energia.
O valor de P2 is 3.4 kW, o que corresponde ao
resultado que obtemos no cálculo exemplar na
seção 1.5.4.
H
[m]
η
[%
14
12
10
8
6
4
2
0
4
3
2
1
0
0 10 20
70
60
50
40
30
20
10
0
30 40 50 60 70 80 Q [m 3/h]
Q [m 3/h]
P2
[kW]
Fig. 1.5.5: Curvas de desempenho da bomba
ρS
ρw
P2S = kP2
.
P2w
.
P2S = 1.15 .
2.9 .
1049
998
= 3.5 kW
58
Seção 1.5
Líquidos](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-57-320.jpg)






![Em ambientes contendo cloretos, o aço inoxidável
pode ser atacado pela corrosão localizada, por
exemplo, corrosão alveolar e corrosão por
frestas. A resistência do aço inoxidável a estes
tipos de corrosão é altamente dependente de sua
composição química. Tornou-se bastante comum
usar os tão conhecidos valores PRE (Equivalente
de Resistência Alveolar) como uma medida da
resistência alveolar do aço inoxidável. Os valores
PRE são calculados por fórmulas nas quais a
influência relativa de alguns elementos de ligação
(cromo, molibdênio e nitrogênio) sobre a resistência
alveolar é levada em consideração. Quanto mais
alto o PRE, mais alta a resistência à corrosão
localizada. Esteja ciente de que o valor de PRE
é uma estimativa muito grosseira da resistência
alveolar de um aço inoxidável e só deve ser usado
para comparação/classificação de diferentes tipos
de aço inoxidável.
A seguir, apresentaremos os quatro tipos principais
de aço inoxidável: ferrítico, martensítico, austenítico
e duplo.
Fig 1.6.17: Composição química do aço inoxidável
Composição química do aço inoxidável [w%]
Microestrutura Designação % % % % % PRE 5)
EN/AISI/UNS Carbon máx. Cromio Níquel Molibdênio Outros
Ferritico 1.4016/430/ S43000 0.08 16-18 17
Martensitico 1.4057/431/ S43100 0.12-0.22 15-17 1.5-2.5 16
Austenítico 1.4305/303/ S30300 0.1 17-19 8-10 S 0.15-0.35 18
Austenítico 1.4301/304/ S30400 0.07 17-19.5 8-10.5 18
Austenítico 1.4306/304L/ S30403 0.03 18-20 10-12 18
Austenítico 1.4401/316/ S31600 0.07 16.5-18.5 10-13 2-2.5 24
Austenítico 1.4404/316L/ S31603 0.03 16.5-18.5 10-13 2-2.5 24
Austenítico 1.4571/316Ti/ 0.08 16.5-18.5 10.5-13.5 2-2.5 Ti 5 x carbono 24
S31635 Ti 0.70
Austenítico 1.4539/904L/ N08904 0.02 19-21 24-26 4-5 Cu 1.2-2 34
Austenítico 1.4547/nenhum / 0.02 20 18 6.1 N 0.18-0.22 43
S 31254 3) Cu 0.5-1
Ferrítico/ 1.4462/ nenhum/ 0.03 21-23 4.5-6.5 2.5-3.5 N 0.10-0.22 34
austenítico S32205 2)
Ferrítico/ 1.4410/nenhum/ 0.03 25 7 4 N 0.24-0.32 43
austenítico S 32750 4)
Microestrutura Designação % % % % % PRE
EN/ASTM/UNS Carbon máx. Crômio Níquel Molibdênio Outros
Austenítico 1) 1.4308/CF8/ J92600 0.07 18-20 8-11 19
Austenítico 1) 1.4408/CF8M/ J92900 0.07 18-20 9-12 2-2.5 26
Austenítico 1) 1.4409/CF3M/ J92800 0.03 18-20 9-12 2-2.5 N máx. 0.2 26
Austenítico 1.4584/nenhum/nenhum 0.025 19-21 24-26 4-5 N máx. 0.2 35
Cu 1-3
Ferrítico/
austenítico 1.4470/CD3MN/ J92205 0.03 21-23 4.5-6.5 2.5-3.5 N 0.12-0.2 35
Ferrítico/ 1.4517/CD4MCuN/ N 0.12-0.22
austenítico J93372 0.03 24.5-26.5 2.5-3.5 2.5-3.5 Cu 2.75-3.5 38
1) Contém um pouco de ferrita 2) Também conhecido como SAF 2205, 3) Também conhecido como 254 SMO, 4)
Também conhecido como SAF 2507 5) Equivalente de Resistência Alveolar (PRE): Cr% + 3,3xMo% + 16xN%.
67](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-66-320.jpg)

![Ligas de Níquel
Ligas à base de níquel são definidas como ligas nas
quais o níquel está presente em maior proporção
do que qualquer outro elemento de ligação.
Os constituintes de ligação mais importantes
são ferro, cromo, cobre, e molibdênio. Os
constituintes de liga tornam possível formar
uma ampla gama de classes de liga. O níquel e
as ligas de níquel têm a capacidade de resistir a
uma ampla variedade de condições operacionais
severas, por exemplo, ambientes corrosivos, altas
temperaturas, altas tensões ou uma combinação
destes fatores.
Ligas Hastelloys™ são uma linha de ligas comerciais
contendo Ni, Mo, Cr e Fe. As ligas à base de níquel,
tais como Inconel™ Alloy 625, Hastelloys™ C-276
e C-22 são altamente resistentes à corrosão e não
estão sujeitas à corrosão alveolar ou por frestas
em água do mar de baixa velocidade e não sofrem
erosão em alta velocidade.
O preço da liga à base níquel limita seu uso
a certas aplicações. As ligas de níquel estão
disponíveis tanto em grades forjadas quanto
fundidas. Entretanto, as ligas de níquel são mais
difíceis de fundir do que os aços carbonos comuns
e ligas de aço inoxidável. As ligas de níquel são
especialmente utilizadas para peças da bomba
na indústria de processamento químico.
Ligas de cobre
O cobre puro tem excelentes propriedades
térmicas e elétricas, mas é um material muito
macio e dúctil.
Elementos de liga resultam em diferentes
materiais de fundidos e forjados, que são
adequados para uso na produção de bombas,
tubulações, acessórios, vasos de pressão e para
muitas aplicações marinhas, elétricas e de
engenharia em geral.
Tipos comuns de ligas de cobra
Material Elementos principais de liga [w%]
1)
Zinco Estanho Níquel Cobre
Latão
Latão vermelho
(metal de arma)
Bronze
Cuproníquel
descanso
descanso
descanso
descanso
2)
1) Chumbo pode ser adicionado como elemento de ligação
para aumentar a capacidade de usinagem.
2) O bronze pode ser ligado com o alumínio para aumentar
a resistência.
Fig 1.6.18: Tipos comuns de ligas de cobre
Latões são os mais amplamente utilizados nas
ligas de cobre por causa de seu baixo custo,
sua fabricação e usinagem fáceis ou baratas.
Entretanto, eles são inferior ao bronze
em resistência e não devem ser usados em
ambientes que causem dezincificação (ver seção
sobre corrosão seletiva).
Latão vermelho, bronze, níqueis de cobre em
particular têm, em comparação ao ferro fundido,
uma alta resistência aos cloretos em líquidos
agressivos, tais como água do mar. Em tais
ambientes o latão não é adequado por causa de
sua tendência a dezincificar.
Todas as ligas de cobre têm fraca resistência a
líquidos alcalinos (alto pH), amônia e sulfetos
e são sensíveis à erosão. Latão, latão vermelho
e bronze são amplamente usados para fazer
rolamentos, impulsores e carcaças de bombas.
69](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-68-320.jpg)









![Pressão (p)
A pressão é uma medida de força por área unitária.
Nós distinguimos entre pressão estática, pressão
dinâmica e pressão total. A pressão total é a soma da
pressão estática e da pressão dinâmica:
Pressão estática
A pressão estática psta é a pressão que é medida com o
medidor de pressão colocado perpendicular ao fluxo
ou num líquido sem movimento, ver figura 2.2.2.
12
12
Pressão Dinâmica
A pressão dinâmica pdyn é causada pela velocidade do
líquido. A pressão dinâmica não pode ser medida por
um manômetro normal, mas é calculada pela seguinte
fórmula:
12
onde:
ρ é a densidade do líquido em [kg/m3]
v é a velocidade do líquido em [m/s]
12
A pressão dinâmica pode ser convertida em pressão
estática pela redução da velocidade do líquido e
vice versa. A figura 2.2.3 mostra uma parte de um
sistema onde o diâmetro do tubo aumenta de D1 a D2,
resultando numa diminuição na velocidade do líquido
de v1 para v2. Assumindo que não há perda por fricção
no sistema, a soma da pressão estática e da pressão
dinâmica é constante por todo o tubo horizontal.
12
12
Assim, um aumento no diâmetro do tubo, como
aquele mostrado na figura 2.2.3 resulta num
aumento na altura manométrica estática medida
com o medidor de pressão p2.
Na maioria dos sistemas de bombas, a pressão
dinâmica pdyn tem um impacto menor na pressão
total. Por exemplo, se a velocidade de um fluxo de
água é 4,5 m/s, a pressão dinâmica é em torno de
0,1 bar, que é considerada insignificante em muitos
sistemas de bombeamento. Mais tarde neste capítulo,
discutiremos a pressão dinâmica em conexão com a
determinação da altura manométrica de uma bomba.
psta ptot pdyn
psta psta
ptot
ptot
Fig. 2.2.2: Como determinar a pressão estática psta,
pressão dinâmica pdyn e a pressão total ptot
p1 p2
Q
v1 v2
D2 D1
ptot
psta
pdyn
A
P
B
Fig. 2.2.3: A pressão estática aumenta se a
velocidade do líquido for reduzida. A figura se aplica
a um sistema com perda de fricção insignificante.
84
Seção 2.2
Desempenho das bombas](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-83-320.jpg)
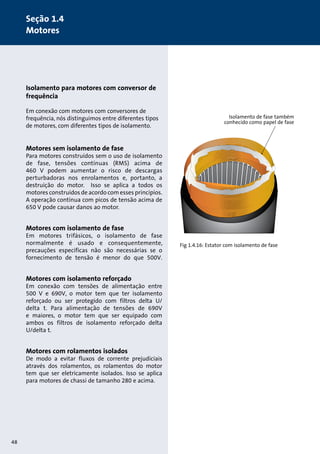
![7.3 m
H(m)
12
10
8
6
4
Duty point for water at 95°C
Duty point for water at 20°C
Duty point for brine at 20°C
Tabela de conversão para unidades de pressão
0.0968 0.1 1
Pa bar
point for diesel Salmoura 10.2 m
10.6 m
12.75 m
1 bar 1 bar 1 bar Duty 1 bar 1 bar 1 bar 1 bar
H(m)
12
10
8
6
4
H(m)
12
10
8
Duty point for water at 95°C
Duty point for water at 20°C
6
Duty point for brine at 20°C
4
2
Tabela de conversão para unidades de atm* at** 1 bar
1 atm
1 at = 1 kp/cm3
1 m H2O
1 bar 1 bar 1 bar 1 bar
Pa bar
0.0968 0.1 Tabela de conversão para unidades de pressão
Pa bar
1 Pa = 1 N/m2 10-5 1 9.87 . 10-4 750 . 10-5 1.02 . 10-4
750
1.02 . 10-5
10 5 1 0.987 1.02 10.2
1.013 . 10 5 1.013 1 1.033 10.33
760 . Duty point for diesel at 20°C
0.981 10 5 0.981 0.968 1 10
736 0.981 . 10 4
0.0981 Duty point for water at 95°C
73.6 0.0968 0.1 1
H(m)
12
10
Duty point for water at 20°C
* Atmosfera física ** Atmosfera teórica
atm* at** mH2O mmHg
1 bar
1 atm
1 at = 1 kp/cm3
1 m H2O
2
Q
Duty point for diesel at 20°C
7.3 m
10.2 m
10.6 m
1 Pa = 1 N/m2 10-5 1 9.87 . 10-4 1.02 . 1010 1 5 0.987 1.02 1.013 . 10 1.013 5 1 1.033 0.981 . 10 5 0.981 0.968 1 0.981 . 10 4
0.0981 * Atmosfera física ** Atmosfera teórica
Duty point Duty a 20°C
1300 kg/m3
1 bar = 7.3 m
Água a 20°C
997 kg/m3
1 bar = 10.2 m
7.3 m
10.2 m
10.6 m
12.75 m
8
6
Duty point for brine at 20°C
Água a 95°C
960 kg/m3
1 bar = 10.6 m
Óleo diesel a 20°C
800 kg/m3
1 bar = 12.75 m
Fig. 2.2.5: Bombeando quatro líquidos diferentes a 1
bar no lado da descarga da bomba resulta em quatro
alturas manométricas diferentes(m), por isso quatro
pontos de trabalho diferentes
Medição da pressão
A pressão é medida em, por exemplo, Pa (N/m2), bar
(105 Pa) ou PSI (Ib/in2). Quando trabalhamos com
pressão é importante saber o ponto de referencia
para a medição da pressão. Dois tipos de pressão
são essenciais em conexão com a medição de
pressão: pressão absoluta e pressão manométrica:
Pressão absoluta (pabs)
A pressão absoluta é definida como a pressão acima
do vácuo absoluto, 0 atm, que é o zero absoluto
para a pressão. Normalmente, o valor “pressão
absoluta” é usado em cálculos de cavitação.
Pressão manométrica
A pressão manométrica, com frequência
conhecida como sobrepressão, é a pressão maior
do que a pressão atmosférica normal (1 atm).
Normalmente, a pressão p é determinada como
pressão manométrica por que a maioria das
medições dos sensores e dos medidores de pressão
mede a diferença de pressão entre o sistema e a
atmosfera. Por todo esse livro o termo pressão se
refere a pressão manométrica.
Altura manométrica (H)
A altura manométrica de uma bomba é a expressão
da altura que a bomba pode elevar um líquido. A
altura manométrica é medida em metros (m) e é
independente da densidade do líquido. A fórmula a
seguir mostra a relação entre pressão (p) e a altura
manométrica (H):
onde :
H é a altura manométrica em [m]
p é a pressão em [Pa = N/m2]
ρ é a densidade do líquido em [kg/m3]
g é a aceleração da gravidade em [m/s2]
Normalmente, a pressão ρ é medida em [bar], que
é igual a 105 Pa. Entretanto, outras unidades de
pressão também são usadas também, ver figura
2.2.4.
A relação entre a pressão e a altura manométrica é
mostrada na figura 2.2.5 onde a bomba manuseia
quatro líquidos diferentes.
1 Pa = 1 N/m2 10-5 1 9.87 . 10-4 750 . 10-5 1.02 . 10-4
750
1.02 . 10-5
10 1 5 0.987 1.02 10.2
1.013 . 10 1.013 760 5 1 1.033 10.33
0.981 . 10 0.981 736 5 0.968 1 10
0.981 . 10 0.0981 73.6 4
* Atmosfera física ** Atmosfera teórica
atm* at** mH2O mmHg
1 bar
1 atm
1 at = 1 kp/cm3
1 m H2O
2
Q
Duty point for diesel at 20°C
Fig. 2.2.4: Tabela de conversão para unidades de pressão
85
12
12](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-84-320.jpg)
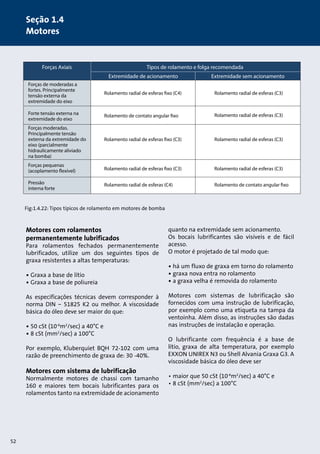
![v1 p1 D1
v2
Fig. 2.2.6: Bomba padrão com sucção na
extremidade com diferença de dimensão na
sucção e portas de descarga
Como determinar a altura manométrica
A altura manométrica da bomba é determinada
pela leitura da pressão nos flanges da bomba p2,
p1 e depois a conversão dos valores em altura
manométrica - ver figura 2.2.6. Entretanto, se uma
diferença geodésica na altura manométrica estiver
presente entre dois pontos de medição, como é
o caso na figura 2.2.6, é necessário compensar a
diferença. Além disso, se as dimensões da porta dos
dois pontos de medição diferirem uma da outra,
a altura manométrica real também tem que ser
corrigida para este.
12
12
12
A altura manométrica da bomba real H é calculada
pela seguinte fórmula:
12
12
onde :
H é a altura manométrica real da bomba em [m]
p é a pressãonos flanges em [Pa = N/m2]
ρ é a densidade do líquido em [kg/m3]
g é a aceleração da gravidade em [m/s2]
h é a altura geodésica em [m]
v é a velocidade do líquido em [m/s]
12
A velocidade do liquido v é calculada
pela seguinte fórmula:
onde:
v é a velocidade do líquido em [m/s]
Q é o fluxo volumétrico em [m3/s]
D é o diâmetro da porta em [m]
Combinando estas duas fórmulas, a altura
manométrica H depende dos seguintes fatores: As
medições de pressão p1 e p2, a diferença em altura
geodésica entre os pontos de medição (h2-h1), o
fluxo através da bomba Q e o diâmetro das duas
portas D1 e D2.
A correção devida à diferença no diâmetro da porta
é causada pela diferença na pressão dinâmica. Em
vez de calcular a correção a partir da fórmula, a
contribuição pode ser lida num nomograma, ver
apêndice F.
h2 h1
D2
p2
h2 - h1 = 355 mm
D1 = 150 mm
v1 = 3.77 m/s2
D2= 125 mm
p1 = 0.5 bar
v2 = 5.43 m/s2
p2 = 1.1 bar
86
Seção 2.2
Desempenho das bombas](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-85-320.jpg)


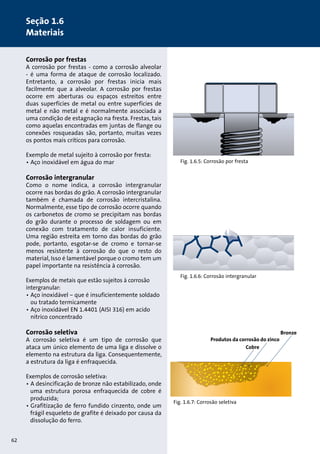
![H
Pressão do vapor
a = Frente das pás do
rotor
b = Parte de trás das pás
do rotor
Bolhas de vapor
implodindo
a = Frente das pás
do rotor
b = Parte de trás
das pás do rotor
a
b
Fig.: 2.2.10: Desenvolvimento da pressão através de uma
bomba centrifuga
Q
a
p
p1
Entrada do rotor Saída do ro
NPSH
H
Q
H
Pressão [Pa]
Fig.: 2.2.12: curva NPSH
Cavitação e NPSH
A cavitação ocorre em algum lugar na bomba
quando a pressão é menor do que a pressão do
vapor do líquido, ver figuras 2.2.9 e 2.2.10.
Quando a pressão no lado da sucção cai abaixo
da pressão do vapor do líquido (figura 2.210
ponto amarelo), pequenas bolhas de vapor se
formam. Estas bolhas cedem (implodem) quando
a pressão sobe (figura 2.2.10 ponto vermelho) e
libera ondas de choque. Consequentemente, os
impulsores podem ser danificados pela energia
liberada. A taxa do dano ao impulsor depende
das propriedades do material. O aço inoxidável
é mais resistente à cavitação do que o bronze e
o bronze é mais resistente à cavitação do que o
ferro fundido, ver seção 1.6.3.
A cavitação diminui o fluxo (Q) e a altura
manométrica (H), o que leva a desempenho
H
reduzido da bomba, ver figura 2.2.11. O dano
devido à cavitação com frequência apenas é
detectado quando a bomba é desmontada.
Além disso, a cavitação causa aumento de ruído
e vibrações, o que pode consequentemente
danificar os rolamentos, retentores de eixo e
soldas.
Cálculo do risco de cavitação
Para evitar a cavitação, a seguinte fórmula é
usada para calcular a altura manométrica de
sucção máxima:
hmax – Altura manométrica máxima de sucção
Hb – pressão atmosférica no local da bomba;
esta é a elevação de sucção máxima teórica, ver
figura 2.2.13
Hf – Perda de fricção no tubo de sucção
NPSH = Altura manométrica de sucção positiva
líquida (é para ser lida na curva NPSH no fluxo
operacional mais alto) ver figura 2.2.12.
Q
Q
NPSH
H
Q
H
Curva
quando a
bomba cavita
b
Fig.: 2.2.11: Curva da bomba quando a bomba cavita
89
Fig.: 2.2.9: Implosão das bolhas de cavitação na
parte de trás das pás do rotor](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-88-320.jpg)
![O valor NPSH indica em que medida a bomba não
é capaz de criar vácuo absoluto, isto é para levantar
uma coluna cheia de água 10,33 m acima do nível
do mar, ver figura 2.2.13.
NPSH pode ser chamada de NPSHr (requisitada)
ou NPSHa (disponível).
NPSHrequisitada A altura manométrica de sucção
requerida para a bomba
NPSHdisponível Altura manométrica de sucção
disponível no sistema disponivel
O valor NPSH de uma bomba é determinado
pelo teste de acordo com isso 9906 e pe feito
da seguinte maneira. A altura manométrica de
sucção é reduzida enquanto o fluxo é mantido
em nível constante. Quando a pressão diferencial
diminuiu até 3%, a pressão no lado sucção da
bomba é lida; e o valor NPSH da bomba é definido.
O teste é repetido em diferentes fluxos, o que
forma a base da curva NPSH no final.
Colocado de outra forma: Quando a curva NPSH
é atingida, o nível de cavitação é tão alto que a
altura manométrica da bomba diminuiu em 3%.
Hv – Pressão do vapor do líquido; para maiores
informações relativas à pressão do vapor da água,
vá ao apêndice D.
Hs – Fator de segurança. Hs depende da situação
e normalmente varia entre 0,5m e 1 m e para
líquidos contendo gás até 2 m, ver figura 2.2.15.
2.2.2 Condições Elétricas
Quando você quer examinar o desempenho da
bomba, precisa conhecer uma gama de valores.
Nesta seção apresentaremos os valores elétricos
mais importantes: consumo de energia, tensão,
corrente e fator de energia.
Pressão
barométrica
p
b
(bar)
Coluna de
água
H
b
(m)
1.013 10.33
0.935
9.73
9.16
8.10
Fig.: 2.2.13: Pressão barométrica acima do nível do mar
NPSH
Hv
0.899
0.795
Liquido com ar
Q [m3/s]
H [m]
Altura acima
do nível do
NPSH
Ponto de
ebulição
da água (°C)
Liquido deslo
Hf
Hf
Hb
h
140
140
100
100
45
40
35
30
1,5
mar (m)
0
500
1000
2000
100
99
96
93
Fig.: 2.2.15: Curva NPSH típica para líquido contendo gás
45
40
35
30
20
15
12
10
8,0
6,0
5,0
4,0
3,0
2,0
1,5
1,0
0,8
0,6
0,4
0,3
0,2
0,1
120
110
90
80
70
60
50
40
30
20
10
0
Hv
(m)
tm
(°C )
150
130
25
NPSH
Hb
h
Hv
20
15
12
10
8,0
6,0
5,0
4,0
3,0
2,0
1,0
0,8
0,6
0,4
0,3
0,2
0,1
120
110
90
80
70
60
50
40
30
20
10
0
Hv
(m)
tm
(°C )
150
130
25
Fig.: 2.2.14: Sistema com indicação de valores diferentes
que são importantes na conexão com cálculos de sucção
90
Seção 2.2
Desempenho das bombas](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-89-320.jpg)










![Seção 4.1
Ajuste de desempenho da bomba
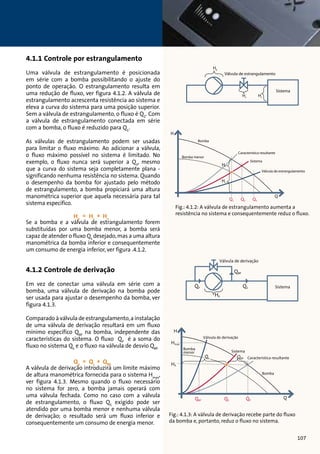
Ao selecionar uma bomba para uma
determinada aplicação é importante
selecionar aquela onde o ponto de operação
está na área de alta eficiência da bomba.
Caso contrário, o consumo de energia da
bomba será desnecessariamente alto. Ver
figura 4.1.1.
Entretanto, algumas vezes não é possível
selecionar uma bomba que se adeque ao
ponto de operação ótimo uma vez que os
requisitos do sistema ou a curva do sistema
são alterados ao longo do tempo.
Portanto, pode ser necessário ajustar
o desempenho da bomba para que ela
atenda os requisitos alterados.
Os métodos mais comuns de mudança de
desempenho de bomba são:
• Controle por estrangulamento
• Controle de derivação
• Modificação do diâmetro do rotor
• Controle de velocidade
A seleção de um método de ajuste de
desempenho de bomba baseia-se em
uma avaliação do investimento inicial
juntamente com os custos operacionais
da bomba. Todos os métodos podem
ser executados continuamente durante
operação independentemente da
modificação do método-diâmetro do
rotor. Frequentemente, as bombas
superdimensionadas são selecionadas
para o sistema e, portanto, é necessário
limitar o desempenho, antes de tudo, da
taxa de fluxo e em algumas aplicações a
altura manométrica máxima.
Nas páginas seguintes você poderá ler
sobre os quatros métodos de ajuste.
Fig.: 4.1.1: Ao selecionar uma bomba é importante
selecionar uma cujo ponto de operação esteja dentro da
área de alta eficiência.
H
[m]
50
40
30
20
10
70
60
50
40
30
20
10
0
0
0 10 20 30 40 50 60 70 80 Q [m3/h]
106](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-103-320.jpg)




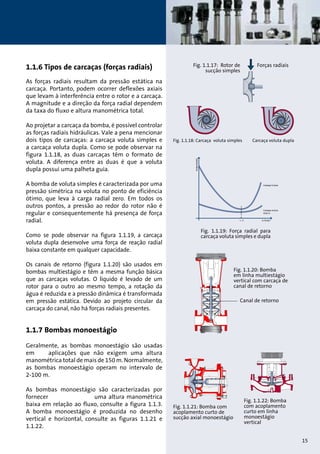
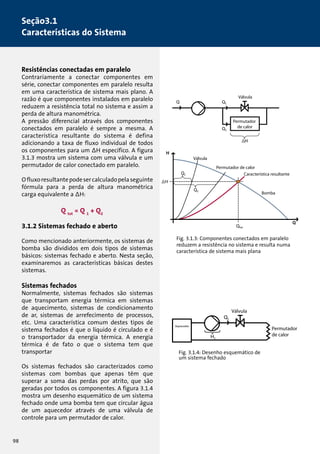
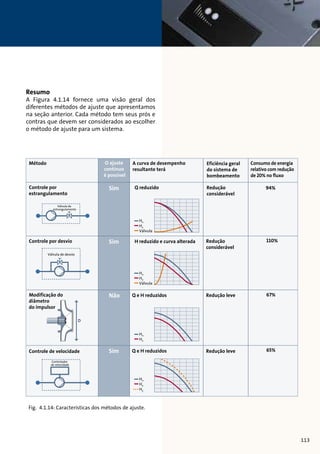
![Controle por estrangulamento
O consumo de energia é reduzido em
aproximadamente 94% quando o fluxo cai.
O estrangulamento resulta em uma altura
manométrica aumentada, ver figura 4.1.10. O
consumo de energia máximo para algumas bombas
fica em um fluxo menor que o fluxo máximo. Se
este for o caso, o consumo de energia aumentará
por conta do estrangulamento.
Controle por derivação
Para reduzir o fluxo no sistema, a válvula deve
reduzir a altura manométrica da bomba para 55 m.
Isto só pode ser feito por meio do aumento do fluxo
na bomba. Conforme mostrado na figura 4.1.11, o
fluxo será consequentemente aumentado para 81
m3/h, que resultará em um aumento no consumo
de energia de até 10% acima do consumo original.
O grau de aumento depende do tipo de bomba e
do ponto de operação. Portanto, em alguns casos,
o aumento na P2 é igual a zero e em poucos casos
raros a P2 poderá até mesmo diminuir um pouco.
Modificação no diâmetro do rotor
Quando o diâmetro do rotor for reduzido,
tanto o fluxo quanto a altura manométrica da
bomba cairão. Por meio da redução de fluxo
de 20%, o consumo de energia é reduzido para
aproximadamente 67% de seu consumo original,
ver figura 4.1.12.
Controle de velocidade
Quando a velocidade da bomba é controlada, tanto
o fluxo quando a altura manométrica são reduzidos,
ver figura 4.1.13. Consequentemente, o consumo
de energia foi reduzido para aproximadamente
65% do consumo original.
Quando se trata de obter a melhor eficiência
possível, o método de ajuste de diâmetro de rotor ou
o método de controle de velocidade da bomba são os
mais adequados para reduzir o fluxo na instalação.
Quando a bomba tiver de operar em um ponto de
operação fixo, modificado, o método de ajuste de
diâmetro de rotor é a melhor solução. Entretanto,
quando nos deparamos com uma instalação, onde a
demanda de fluxo é variável, a bomba controlada por
velocidade é a melhor solução.
H [m]
= Ponto de serviço modificado
= Ponto de serviço original
Q
Q
Q
Q [m3/h]
76
H [m]
70
55
P2
100%
94%
50 60
H [m]
= Ponto de serviço modificado
= Ponto de serviço original
Q
Q
Q
Q
Q [m3/h]
Q
= Ponto de serviço modificado
= Ponto de serviço original
Q [m3/h]
= Ponto de serviço modificado
= Ponto de serviço original
Q [m3/h]
70
P2
100%
76
76
70
55
70
55
70
70
100%
100%
100%
P2
100%
67%
100%
67%
100%
100%
67%
67%
P2
100%
65%
110%
55
50 60
50 60
50 60
81
H [m]
H [m]
Q
Q
70
55
70
55
Q
76
70
55
Fig. 4.1.10: Consumo de energia relativa –
controle por estrangulamento
Q [m3/h]
P2
100%
94%
50 60
H [m]
Q [m3/h]
Q [m3/h]
Q [m3/h]
70
P2
P2
P2
100%
65%
110%
55
50 60
50 60
50 60
81
H [m]
H [m]
Q
Q
70
55
70
55
Q
Fig. 4.1.11: Consumo de energia relativo -
controle por derivação
H [m]
Q [m3/h]
P2
100%
94%
50 60
H [m]
Q [m3/h]
Q [m3/h]
Q [m3/h]
P2
P2
P2
100%
65%
110%
55
50 60
50 60
50 60
81
H [m]
H [m]
Q
Q
70
55
70
55
Q
Fig. 4.1.12: Consumo de energia relativo –
modificação de diâmetro de rotor
H [m]
Q [m3/h]
P2
100%
94%
50 60
H [m]
Q [m3/h]
Q [m3/h]
Q [m3/h]
P2
P2
P2
100%
65%
110%
55
50 60
50 60
50 60
81
H [m]
H [m]
Q
Q
70
55
70
55
Q
Fig. 4.1.13: Consumo de energia relativo –
controle de velocidade
112
Seção 4.1
Ajuste de desempenho de bomba](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-109-320.jpg)





![Ampla faixa de desempenho
As bombas com conversor de frequência integrado
possuem uma gama bastante ampla de faixa de
desempenho, o que permite que elas operem de
forma eficiente sob condições bastante variadas e
atendam a uma ampla gama de requisitos. Assim,
menos bombas podem substituir muitos tipos de
bomba de velocidade fixa com poucos recursos de
desempenho.
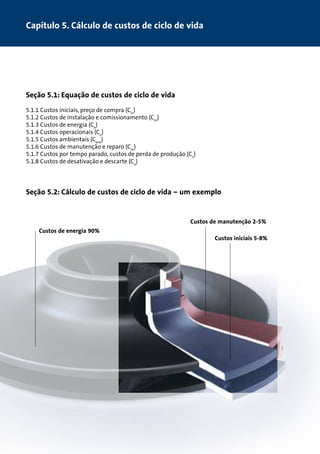
4.4.1. Curvas de desempenho de bombas
controladas por velocidade
Agora, permita-nos fazer uma análise aprofundada
de como você pode ler o desempenho da bomba
controlada por velocidade.
A figura 4.4.2 mostra um exemplo das curvas
de desempenho de uma bomba controlada por
velocidade. A primeira curva exibe a curva QH e
a segunda curva mostra a curva de consumo de
energia correspondente.
Como você pode ver, as curvas de desempenho
são fornecidas para cada diminuição em 10%
na velocidade de 100% para 50%. Da mesma
forma, a curva mínima representada por 25% da
velocidade máxima também é mostrada. Como
nós indicamos no diagrama, você pode indicar
um ponto de operação específico QH e descobrir
em qual velocidade de ponto de operação pode
ser alcançado e o que o consumo de energia da
P1 significa.
4.4.2. Bombas controladas por
velocidade em diferentes sistemas
As bombas controladas por velocidade são
usadas em uma ampla gama de sistemas.
A troca no desempenho da bomba e
consequentemente a economia de energia
potencial dependem do sistema em questão.
Conforme discutido no capítulo 3, a característica de
um sistema é uma indicação da altura manométrica
necessária que uma bomba deve fornecer para
transportar uma certa quantidade de líquido
através do sistema. A Figura 4.4.3 exibe a curva de
desempenho e a característica do sistema de um
sistema fechado e um sistema aberto.
H
[m]
70
60
50
40
30
20
10
0 5 10 15 20 25 30 Q [m 3/h]
Q [m 3/h]
35
P1 [kW]
6
4
2
0
100%
90%
86%
80%
70%
60%
50%
25%
Fig 4.4.2: Curva de desempenho para uma
bomba controlada por velocidade
Curva da bomba Curva da bomba
Característica
do sistema
Q
H
H
Fig 4.4.3: SPonto de característica de sistema
de um sistema fechado e um sistema aberto
H
Q
HO
Sistema fechado Sistema aberto Q
H
Q
HO
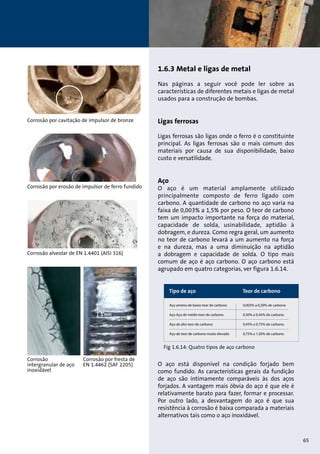
Característica
do sistema
119](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-116-320.jpg)
![Bombas controladas por velocidade em
sistemas fechados
Em sistemas fechados, como sistemas de
aquecimento e ar condicionado, a bomba deve
somente superar as perdas de fricção nas tubulações,
válvulas, trocadores de calor, etc. Nessa seção, nós
apresentaremos um exemplo com uma bomba
controlada por velocidade em um sistema fechado. A
perda de fricção total por um fluxo total é de 15 m3/h
é 18 m, ver figura 4.4.4.
A característica de sistema inicia no ponto (0,0),
a linha vermelha na figura 4.4.5. As válvulas de
controle no sistema sempre precisam de certa
pressão operacional, portanto a bomba não pode
operar de acordo com a característica de sistema.
Isso ocorre porque algumas bombas controladas
por velocidade oferecem a função de controle de
pressão proporcional, que garante que a bomba
operará de acordo com a linha laranja mostrada
na figura. Como você pode ver na figura 4.4.5, o
desempenho mínimo está por volta de 57% da
velocidade total. Em uma operação de sistema de
circulação na curva mínima (25% da velocidade
total) podem ser relevante em algumas situações,
por exemplo, quando lidamos com serviços
noturnos em sistemas de aquecimento.
H
Q = 15 m2/h
Consumidores
Caldeira
ou similar
Fig. 4.4.4: Sistema fechado
H
[m]
24
20
16
12
8
4
100%
99%
90%
80%
70%
50%
0 2 4 6 8 10 12 Q [m 3/h]
Q [m 3/h]
14 16
P1 [kW]
1.2
0.8
0.4
0
60%
25%
Fig. 4.4.5: A Uma bomba controlada por
velocidade em um sistema fechado
120
Seção4.4
Vantagens de bombas com conversor de frequência integrado](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-117-320.jpg)
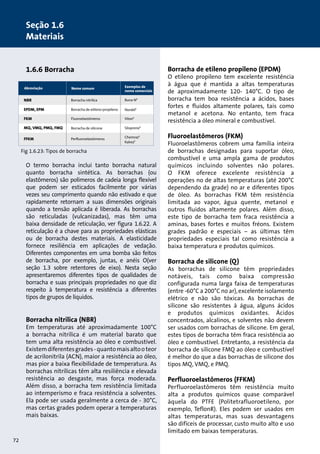
![Bombas controladas por velocidade em
sistemas abertos
A característica do sistema e a faixa operacional
da bomba dependem do tipo de sistema em
questão. A Figura 4.4.6 mostra uma bomba em
um sistema de reforço de pressão/abastecimento
de água. A bomba deve abastecer Q = 6,5 m3/h
para a torneira, que é posicionada h = 20 m acima
da bomba. A pressão de entrada para a bomba ps
é de 1 bar, a pressão na torneira pt deve ser de 2
bar e a perda de fricção total no sistema por fluxo
total de pf é de 1,3 bar.
A Figura 4.4.7 mostra a curva QH de uma
bombacapaz de atender os requisitos descritos
acima. Você poderá calcular a altura manométrica
necessária em fluxo zero (Ho) usando a equação à
sua direita.
Se você precisar calcular a altura manométrica
máxima em um fluxo (Q) de 6.5 m3/h, utilize a
equação abaixo:
pf
. g
1.3. 105
Hmax = oH + = 30.29 9 8+ . 9.81= 43.5
Para cobrir esta aplicação de fluxo zero para fluxo
máximo Ho = h Q pt + = - 6.5 ps
m3/h a (bomba 2-1. )1 05 = 20 9+9.81= operará em uma
. g 9 8 . 30.2 m
faixa de velocidade estreita relativa, que fica entre
65% da velocidade total e até 99% da velocidade
total. Nos sistemas com menos perda de fricção
a variação a velocidade será ainda menor. Se não
houver nenhuma perda de fricção, a velocidade
mínima no caso acima será por volta de 79% da
velocidade.
Como você pode ver a partir dos dois exemplos
anteriores, a variação possível na velocidade e
consequentemente no consumo de energia é
a máxima em sistemas fechados. Portanto, os
sistemas fechados são responsáveis pela maior
economia de energia potencial.
Fig. 4.4.6: Bomba em um sistema de
abastecimento de água
h = 20 m
pt = 2 bar
ps = 1 bar
pf = 1.3 bar
Q = 6.5 m3/h
H
pt - Pressão no ponto de tomada
ps - Pressão de sucção
pf - Perda de fricção
Q - Taxa de fluxo
h - Elevação estática
H
[m]
60
50
40
20
10
pf
. g
1.3. 105
Hmax = oH + = 30.29 9 8+ . 9.81= 43.5
(2-1. )1 05
Ho = h + . g = 20 9 9+8 . 9.81= 30.2 m
100%
pt - ps
0 1 2 3 4 5 6 7 8Q [m 3/h]
Q [m 3/h]
P1 [kW]
1.2
0.8
0.4
0
90%
80%
70%
60%
50%
25%
HO
Fig. 4.4.7: Uma bomba controlada por velocidade em
um sistema aberto
121](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-118-320.jpg)





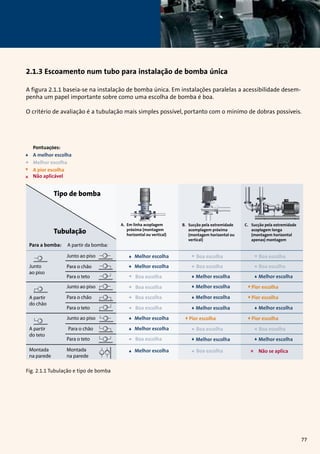
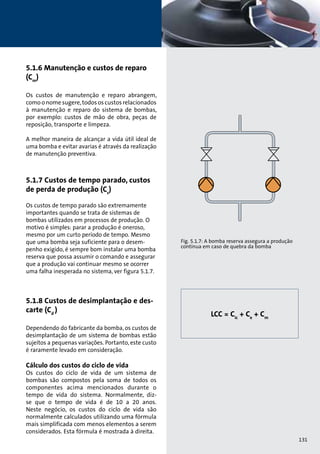
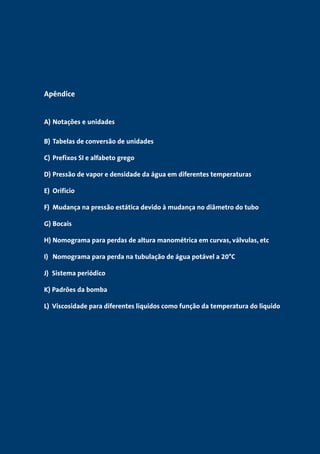
![5.1.3 Custos de energia (Ce )
Na maioria dos casos, o consumo de energia é o
maior custo dentro os custos do ciclo de vida de um
sistema de bombas, onde estas muitas vezes operam
por mais de 2.000 horas por ano. Na verdade, cerca
de 20% do consumo mundial de energia elétrica são
usados em sistemas de bombeamento, ver figura
5.1.5. Abaixo está uma lista de alguns dos fatores que
influenciam o consumo de energia de um sistema de
bombas:
• Perfil da carga
• Eficiência da bomba (cálculo do ponto de
operação), ver figura 5.1.6
• Eficiência do motor (a eficiência do motor em
carga parcial pode variar significativamente
entre motores de alta eficiência e motores de
eficiência normal)
• Dimensionamento da bomba (muitas vezes, as
margens e arredondamentos tendem a sugerir
bombas de grandes dimensões)
• Outros componentes do sistema, tais como tubos
e válvulas
• Uso de soluções de velocidade controlada.
Ao utilizar bombas de velocidade controlada no
setor, é possível reduzir o consumo de energia
em até 50%
5.1.4 Custos operacionais (Co )
Os custos operacionais abrangem custos de mão
de obra relativos à operação de um sistema de
bombeamento. Na maioria dos casos, os custos de
mão de obra relacionados às bombas são modestos.
Hoje, diferentes tipos de equipamentos de vigilância
permitem conectar o sistema de bombas a uma
rede de computadores, proporcionando custos
operacionais baixos.
5.1.5 Custos ambientais(Cenv)
Os custos ambientais abrangem o descarte de peças
e a contaminação provocada pelo líquido bombeado.
A contribuição do fator ambiental para os custos do
ciclo de vida de um sistema de bombeamento no
setor é modesto.
Outros usos 80%
Sistemas de
bombas 20%
Fig. 5.1.5: Consumo mundial de energia
0 5 10 15 20 25 30 35 40 45 50 55
[%]
80
60
40
20
0
Existente
Q [M3/h]
Nova
Fig. 5.1.6: Comparação da eficácia de uma bomba
nova e uma bomba existente
130
Seção 5.1
Equação de custos do ciclo de vida](https://image.slidesharecdn.com/manualdebombasapendicea-140915134010-phpapp02/85/Manual-de-bombas-apendice-a-126-320.jpg)



O documento é um manual técnico sobre bombas produzido pela Grundfos. Apresenta os principais tipos de bombas, componentes, materiais, instalação e leitura de desempenho. Está dividido em 5 capítulos abordando design de bombas, instalação, desempenho, sistemas hidráulicos e ajuste do desempenho. Tem o objetivo de fornecer informações técnicas para engenheiros e técnicos que trabalham com projeto e instalação de sistemas de bombas.
















































