Baixar para ler offline
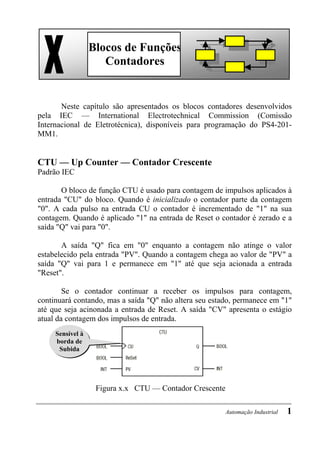














O documento apresenta os blocos contadores desenvolvidos pela IEC, incluindo CTU e CTUD. O CTU é um contador crescente usado para contar pulsos na entrada "CU" e o CTUD é um contador crescente e decrescente usado para contar pulsos nas entradas "CU" e "CD". Exemplos demonstram como usar esses blocos para contar rotações de um motor e contar visitantes em um salão de exposições.