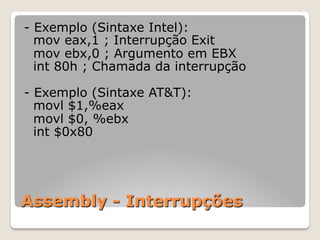
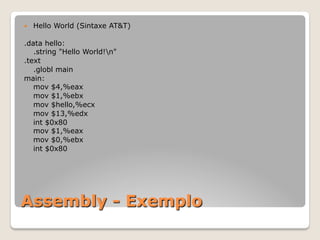
A linguagem assembly é uma linguagem de baixo nível dependente da arquitetura da CPU e não é portável entre diferentes hardware. Embora tenha sido amplamente usada até os anos 80, atualmente é utilizada em aplicações críticas de desempenho, como drivers de dispositivos e sistemas embutidos. A programação em assembly exige conhecimento profundo da estrutura de hardware e possui suas próprias convenções, como a manipulação de registradores e pilhas.


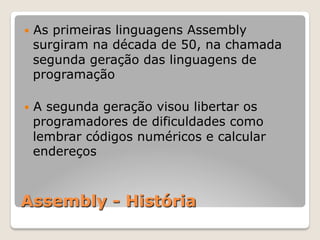
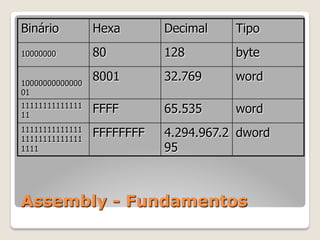
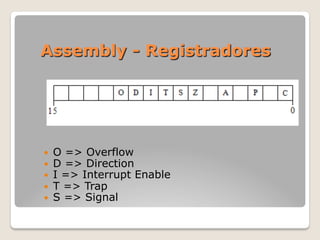
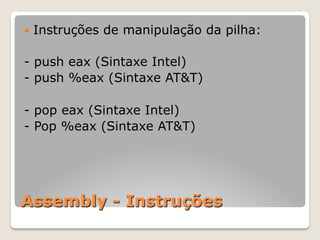
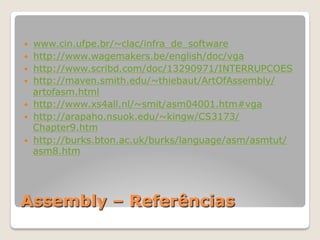
![Assembly - Instruções
Intel AT&T
mov eax, 1 movl $1, %eax
mov ebx, 0ffh movl $0xff, %ebx
mov eax, [ebx] movl (%ebx), %eax
mov eax, [ebx+3] movl 3(%ebx), %eax](https://image.slidesharecdn.com/assemblyaula5-240421142319-da6a6b46/85/Assembly-PDFs-Eduardo-Cj-como-usar-o-assembly-29-320.jpg)
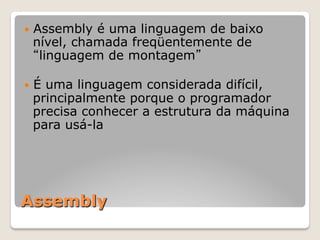
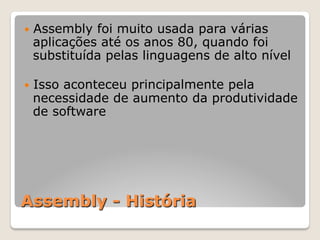
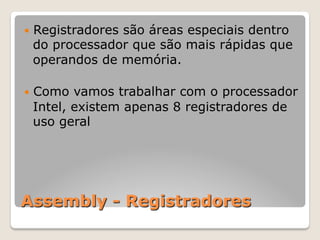
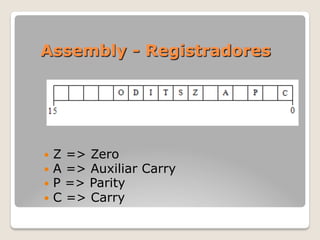
![Assembly - Instruções
— Instrução de soma:
- add destino, fonte (Sintaxe Intel)
Exemplo: add eax,[ebx+ecx]
- add fonte, destino (Sintaxe AT&T)
Exemplo: addl (%ebx,%ecx),%eax](https://image.slidesharecdn.com/assemblyaula5-240421142319-da6a6b46/85/Assembly-PDFs-Eduardo-Cj-como-usar-o-assembly-30-320.jpg)
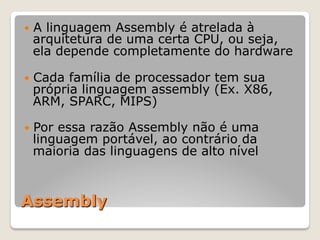
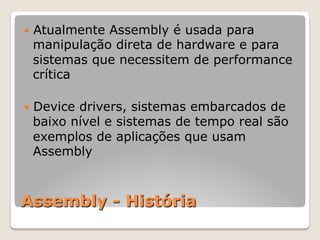
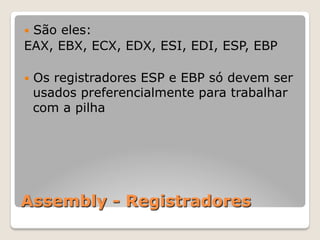
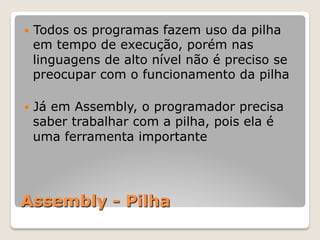
![Assembly - Instruções
— Instruções de jump:
“Pulo” incondicional:
- jmp [100] (Sintaxe Intel)
- jmp eax (Sintaxe Intel)
- jmp *100 (Sintaxe AT&T)
- jmp *%eax (Sintaxe AT&T)](https://image.slidesharecdn.com/assemblyaula5-240421142319-da6a6b46/85/Assembly-PDFs-Eduardo-Cj-como-usar-o-assembly-34-320.jpg)
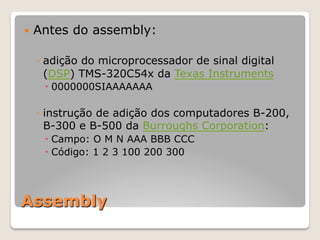
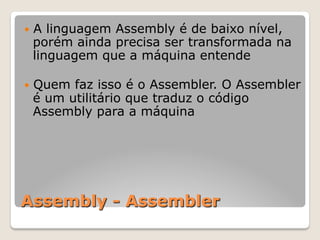
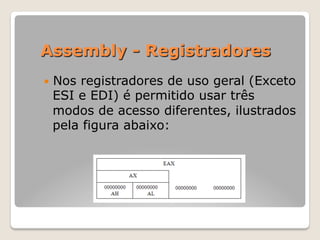
![Assembly - Instruções
“Pulo” condicional:
- je [100] (Sintaxe Intel)
- jne eax (Sintaxe Intel)
- je *100 (Sintaxe AT&T)
- jne *%eax (Sintaxe AT&T)](https://image.slidesharecdn.com/assemblyaula5-240421142319-da6a6b46/85/Assembly-PDFs-Eduardo-Cj-como-usar-o-assembly-35-320.jpg)