Baixado 21 vezes




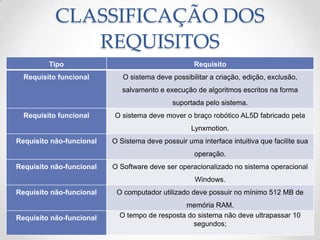
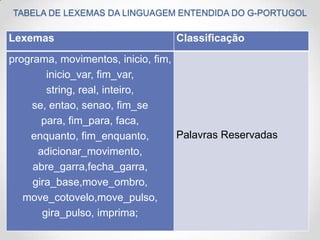
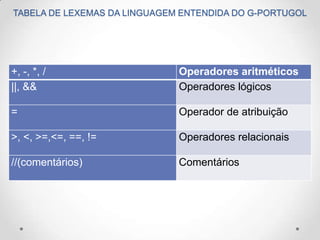
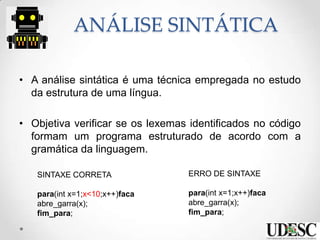
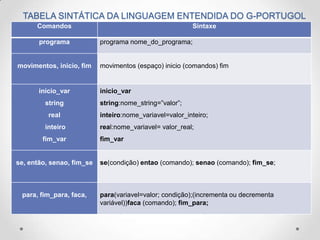
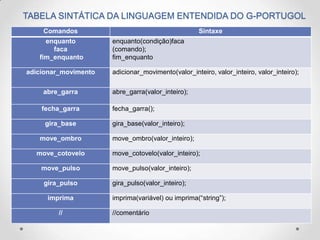
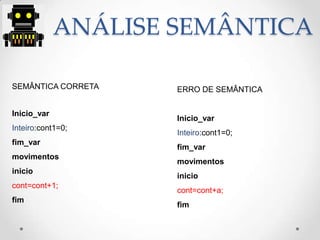
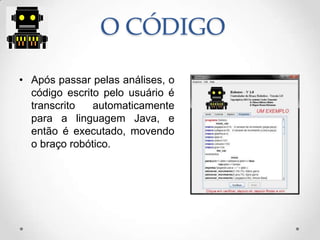
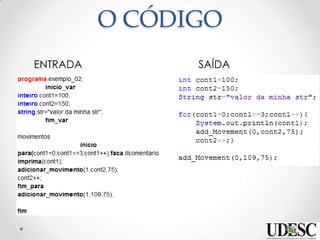

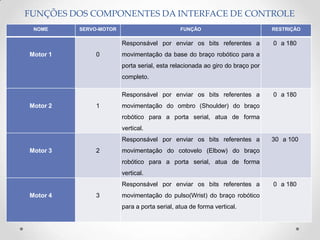
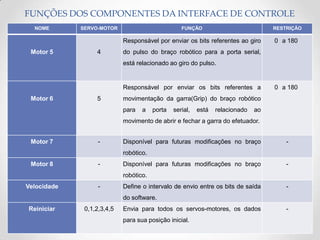
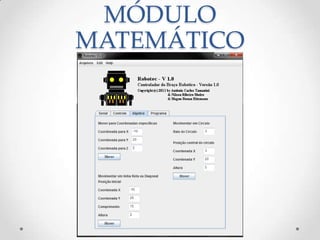
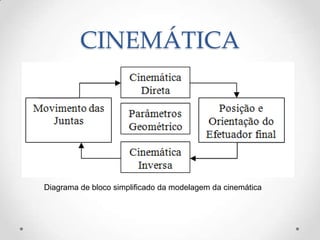
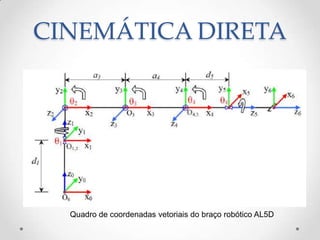

O documento descreve o projeto Robotec, uma ferramenta computacional para controlar um braço robótico através de algoritmos baseados em pseudocódigo Portugol. O sistema permite ensinar lógica de programação, álgebra vetorial e cinemática básica de forma interativa. O documento detalha os requisitos, módulos, análises lexica, sintática e semântica necessárias para interpretar os comandos e movimentar o braço robótico corretamente.






















































