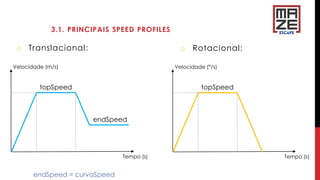
O documento descreve o controle de um micromouse usando controladores PD e um profiler de velocidade. Ele explica como controlar a velocidade translacional e rotacional do micromouse usando feedback de encoders, sensores e giroscópio e calculando os erros de posição e velocidade. Além disso, apresenta exemplos de código para o controlador e perfis de velocidade translacional e rotacional.