GPS Survey Planning and Techniques
•
1 gostou•4,181 visualizações

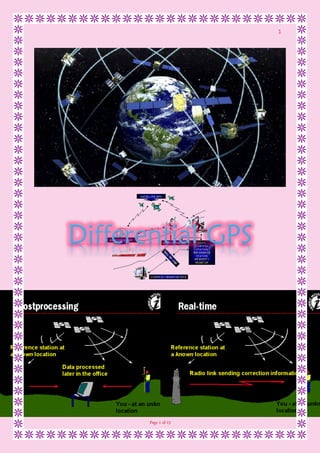
Differential Global Positioning System

Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (20)
Destaque
Destaque (20)
Semelhante a GPS Survey Planning and Techniques
Semelhante a GPS Survey Planning and Techniques (20)
Mais de Atiqa khan
Mais de Atiqa khan (20)
Último
Último (20)
GPS Survey Planning and Techniques
- 1. 1
- 2. 2 Table of Contents Multiple Choice Questions (MCQs) Answers True False Statements Answers Short Quires Answers
- 3. 3 Multiple Choice Questions 1. When satellite are close together the chance of ______ increased in the position a) Accuracy b) Duplication c) Uncertainty d) None of them 2. Three different satellites intersect each other at a point is the basic concept of a) Positioning b) DGPS c) Remote sensing d) All of them 3. We always measure the unknown point from some referenced bench mark is the main concept of a) GPS b) DGPS c) Positioning d) b and c 4. If we required the accuracy of positioning result within 10-15 meters then we use a) Measuring tape b) DGPS c) Theodolite d) GPS 5. Triangulation results consider to be more accurate while using _____ frequency mode in DGPS a) Single b) Dual c) Random d) a and c 6. While using DGPS in single frequency mode best triangle is obtained between
- 4. 4 a) two receiver and one rover station b) two receiver and one satellite c) one receiver and two satellites d) b and c 7. When we perform surveying to establish control point in any location with precision is in mm then we use DGPS ______ type a) Stop and go surveying b) Rapid static surveying c) Static surveying d) All of them 8. Post processing of DGPS is very complex and difficult because it deal with the a. Geometry of satellites b. Signals travels from satellite to receivers c. Time delay issues d. All of them 9. Accuracy degradation in the three dimensional position is obtained from a. GDOP b. TDOP c. PDOP d. HDOP 10. To establish a base line from known point to unknown point we need two things a) Length between stations and Azimuth b) Travelled time from one station to other and bearing c) Distance from known point to unknown point and angle from north d) None of them 11. If there are 7 stations possible number of non-trivial baselines are a) 7 b) 6 c) 5 d) 4
- 5. 5 12. A radio link is maintain between the base receiver and the rover, and the base receiver supplies the correct measurements without post processing. a) static survey b) rapid static survey c) real time survey d) dilution of precision 13. Surveying type to replace short range traversing and local triangulation with accuracy 5-10 mm + 1 ppm. a) static survey b) rapid static survey c) real time survey d) kinematics survey 14. Master station is included in________. a) Space segment b) Control segment c) user segment d) all of them 15. _________ is a method of determining the relative positions of objects using the geometry of triangles. a) Triangulation b) Trilateration c) Trivial d) Resection 16. Point positioning using four satellites is similar in principle to _______. a) Triangulation b) Trilateration c) Resection d) cross-sectional method 17. Latitude, Longitude and Height gives________ accuracy. a) Geometrical b) Positional
- 6. 6 c) Horizontal d) Vertical 18. Which of the following is not true about reference station? a) Computes corrections b) Transmits corrections c) receives the corrections d) none 19. In point positioning the accuracy in each component is_______. a) 5 to 10m b) 10 to 20m c) 10 to 30m d) 5 to 20m 20.__________ is used to create control points by using raw GPS data from the satellites. a) Pre Processing b) Post Processing c) Real Time d) none 21. ________ Survey is Suitable for highly accurate survey e.g. geodetic control network. a) Static b) Rapid static c) kinematic d) stop and go 22.No post processing is required in _______. a) Static survey b) Real Time c) both a & b d) none 23._______ Survey is usually done by Triangulation. a) Static
- 7. 7 b) Rapid static c) kinematic d) stop and go 24.Static survey is usually done by________. a) Triangulation b) Trilateration c) Trivial d) Resection 25.A _________is the difference between the transmission time at the satellite and the reception time at the receiver. a) orbital error b) Pseudo range c) ionosphere error d) tropospheric error 26.Which is not true about point positioning? a) Accuracy 10 to 20m in each component b) Dependent on DoP Selective Availability c) Navigation Applications d) Not suited for Surveying or Precise Navigation Answers 1. c 2. a 3. b 4. d 5. b 6. d 7. c 8. d 9. b 10. c 11. b 12. c 13. b 14. b 15. b 16. c 17. b 18. c 19. b 20. b 21. b 22. b 23. a 24. a 25. b 26. b
- 8. 8 True False 1-Radio signals are used from a constellation of earth-orbiting satellites to determine the 3D position of a receiver? (True/false) 2-GPS signals must travel through a number of layers making up the atmosphere. (True/false) 3-When the GPS signal arrives at earth it may reflect off various obstructions. (True/false) 4-RANGE = Time Taken x Speed of Light. (True/false) 5-To "triangulate," a GPS receiver measures distance using the travel time of radio signals. (True/false) 6-Differential GPS or "DGPS" can yield measurements good to a couple of meters in moving applications and even better in stationary situations. (True/false) 7-GDOP (Geometrical), Includes Lat, Lon, Height & Time (True/false) 8-HDOP (Horizontal) Includes Lat only. (True/false) 9-Single frequency as well as Dual Frequency GPS receivers are used in static survey. (True/false) 10-Every station in the network is connected to at least one other station by a non- trivial baseline. (True/false) 11-The new control points established relative to known control points by static / kinematic survey. (True/false) 12- Post processing required for real time code /phase (True/false) 1. T 2. T 3. T 4. T 5. T 6. T 7. T 8. F 9. T 10. T 11. T 12. F
- 9. 9 SHORT QUESTIONS Q1: Define pseudo-range for GPS and its formula? A pseudo range (code observation) is the difference between the transmission time at the satellite and the reception time at the receiver (Erickson, 1992). Pseudo range between the satellite and the receiver is obtained by scaling it using the speed of light. The observation equation for a pseudo range is given AS: Where, p is the observed pseudo range, is the unknown satellite-receiver range, c is the speed of light, dt is the satellite clock error, dT is the receiver clock error, d is the orbital error, dion is the ionospheric error, dtrop is the tropospheric error, p is the code measurement noise and multipath. Q2: How satellite clock error effects the position of GPS satellites? Though they use atomic clocks, they are still subject to small inaccuracies in their time keeping. These inaccuracies will translate into positional errors: “Orbit Uncertainty”. The satellites position in space is also important as it’s the beginning for all calculations. They drift slightly from their predicted orbit
- 10. 10 Q3: What is the source of error in distance calculation of satellite-receiver? GPS signals transmit their timing information via radio waves. It is assumed that a radio wave travels at the speed of light. GPS signals must travel through a number of layers making up the atmosphere. As they travel through these layers the signal gets delayed. This delay translates into an error in the calculation of the distance between the satellite and the receiver. Q4: On which factors selection of GPS survey depends? Desire level of accuracy Use of survey Size of survey Type of equipment used Available software Q5: Why to use DGPS? Eliminates errors in the sat. and receiver clocks Minimizes atmospheric delays Accuracy 3mm - 5m Q6: Define DOPs? A description of purely geometrical contribution to the uncertainty in a position fix. It is an indicator as to the geometrical strength of the satellites being tracked at the time of measurement Q7: How RTIME Code works? At Reference Station
- 11. 11 Reference Station on a Known Point Tracks all Satellites in View Computes corrections for each satellite Transmits corrections via a communication link in either propriety format or in the RTCM format At the Rover Station Rover unit receives the corrections via the communication link Rover position corrected by applying the received corrections Q8: Write down the merits and de-merits of Real Time GPS? Merits De-merits Good Accuracy for short surveys Not good accuracy for detailed survey One man operation Short rang network Ease of operation No post processing Q9: What are the major steps for planning a Real Time GPS survey? Accuracy Requirements Code = meter / sub-meter Phase = centimeter Availability of Control Horizontal Vertical Both Type of Transformation Local Grid WGS84
- 12. 12 Q10: Define DOPs by its rating? Q11: What are the required steps for planning a GPS survey? • Available Planning tools • Satellite availability • Satellite visibility • Sky-plots • Elevations of satellites • Predicted DOP values (HDOP, VDOP, GDOP,TDOP) Q12: Write down the nomenclature for GPS data processing files and write down its extensions? File name nomenclature AAAABBBC.dat AAAA = last 4 numbers of receiver serial number
- 13. 13 BBB = Julian date File number starting from 0 to F Extensions are: DC01, DC02, DAT Q13: What are the 5 segments of the GPS system? Space Segment Master Control Station Monitor Station Ground Antennas User Segment Q14: Differentiate between static and stop n go methods? Static Stop n Go More accurate Less Accuracy Wide Range area coverage Shot range Not real time Semi -real time example Longer observation time Shorter observation time Q15: List out all type of errors in GPS system? Satellite clock uncertainties Multipath errors Receiver clock drift Internal receiver noise error Obstruction from buildings, mountains etc. Signal out of sight