การออกแบบตัวควบคุมความเร็วสายพาน
•Transferir como PPTX, PDF•
2 gostaram•1,962 visualizações

ขั้นตอนในการทดลองและควบคุมความเร็วของสายพาน โดยใช้ Arduino ร่วมกับบอร์ด L298

Recomendados
Mais conteúdo relacionado
Destaque
Destaque (20)
การออกแบบตัวควบคุมความเร็วสายพาน
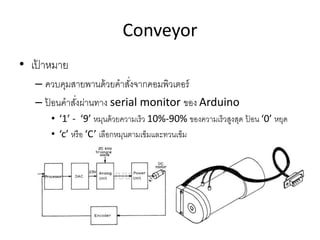
- 1. Conveyor • เป้ าหมาย – ควบคุมสายพานด้วยคาสั่งจากคอมพิวเตอร์ – ป้ อนคาสั่งผ่านทาง serial monitor ของ Arduino • ‘1’ - ‘9’ หมุนด้วยความเร็ว 10%-90% ของความเร็วสูงสุด ป้ อน ‘0’ หยุด • ‘c’ หรือ ‘C’ เลือกหมุนตามเข็มและทวนเข็ม
- 2. Conveyor • หัวต่อแบบ D sub 9 pin
- 4. Procedure • เตรียมชุดทดลอง = หัวต่อ D sub 9 pin + บอร์ดขับกระแส + Arduino คอมพิวเตอร์ – เลือกขาสาหรับขับมอเตอร์ และเอ็นโค้ดเดอร์ • ทดสอบความสัมพันธ์ (? pulse/cm) – วัดระยะที่จานวนพัลส์ต่างๆกัน โดยทาทั้งสายพานหมุนไปทางซ้าย/ทางขวา – นาผลการทดสอบไปพล็อตกราฟหาความสัมพันธ์ • ทดสอบความเร็วสูงสุด (? rpm) – ขับด้วย PWM 100% – อ่านค่าความเร็วจาก serial monitor
- 5. const int enPin = X; const int dirPin = X; const int pwmPin = X; void motorTurn(float duty_cycle) { byte pwm; if (duty_cycle != 0) digitalWrite(enPin, HIGH); else digitalWrite(enPin, LOW); if (duty_cycle > 0) { digitalWrite(dirPin, LOW); pwm = map(duty_cycle, 0, 100, 0, 255); analogWrite(pwmPin, pwm); } else { digitalWrite(dirPin, HIGH); pwm = 255 - map(-duty_cycle, 0, 100, 0, 255); analogWrite(pwmPin, pwm); } } โค้ดตัวอย่างสาหรับขับมอเตอร์ #1 หมุนด้วย Ton หมุนด้วย Toff กาหนดค่าตามขาที่เลือก
- 6. const int chB = X; volatile unsigned long count = 0; void pulseCount() { if (digitalRead(chB) == HIGH) count++; else count--; } void setup() { pinMode(dirPin, OUTPUT); pinMode(enPin, OUTPUT); pinMode(enPin, OUTPUT); pinMode(chB, INPUT); attachInterrupt(X,pulseCount,RISING); Serial.begin(9600); } โค้ดตัวอย่างสาหรับนับพัลส์ #2 กาหนดค่าตามขาที่เลือก 0 D2 หรือ 1 D3
- 7. #define NUM_PULSE (X) void loop() { if (count < NUM_PULSE) motorTurn(50.0); else motorTurn(0); Serial.print("Count: "); Serial.println(count); delay(100); } #define PULSE_PER_CM (X.X) void loop() { float speed = count / PULSE_PER_CM * 60; count = 0; motorTurn(100.0); Serial.print("Speed: "); Serial.println(speed); delay(1000); } โค้ดตัวอย่างสาหรับทดลอง จากผลการทดลอง cm/min
- 8. PID controller • หลักการควบคุม = สร้างสัญญาณควบคุมจากการคานวณ error = setpoint - feedback • setpoint อ่านค่าจาก potentiometer • Feedback อ่านค่าจากเอ็นโค้ดเดอร์
- 9. #define MAX_SPEED (X.Y) const float Kp = 1.0; const float Ki = 0.0; const float Kd = 0.0; float sumErr = 0.0; float lastSpeed = 0.0; setpoint = readSerial(); speed = count / PULSE_PER_CM * 600; speed = speed/MAX_SPEED * 100.0; float pidCtrl(float setpoint, float speed) { float error, ctrl, speedChange; error = setpoint – speed; sumErr += error; speedChange = speed – lastSpeed; ctrl = Kp*error + Ki*sumErr + Kd*speedChange; lastSpeed = speed; return ctrl; } โค้ดตัวอย่างสาหรับตัวควบคุม PID มาจากผลทดลอง อ่านตัวอักษรและคืนค่า แปลง rpm รอบ 0.1 s
- 10. Results • เอกสารสรุปงาน (ประมาณ 3-4 หน้า ส่งพร้อมสาธิต) – ค่า pulse/cm และความเร็วสูงสุดจากการทดลอง – กราฟแสดง speed ของตัวควบคุม PID เมื่อปรับค่า Kp,Ki,Kd ต่างๆกัน (ใช้ delay(100) ภายใน loop) – โค้ดสมบูรณ์ที่รวมโค้ดตัวอย่างเข้าด้วยกัน • รับคาสั่งปรับทิศทางและความเร็วจากคอมพิวเตอร์ • กราฟแสดงการควบคุมความเร็ว เมื่อทดลองวางของที่น้าหนักต่างกันบนสายพาน • การให้คะแนนพิจารณาความเรียบร้อยของชิ้นงานด้วย