
Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (20)
Destaque
Semelhante a Matched filter
Semelhante a Matched filter (20)
Último
Último (20)
Matched filter
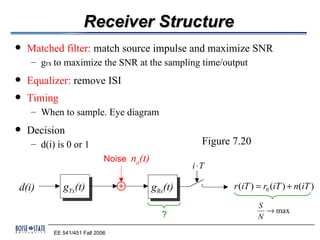
- 1. Receiver Structure Matched filter: match source impulse and maximize SNR – grx to maximize the SNR at the sampling time/output Equalizer: remove ISI Timing – When to sample. Eye diagram Decision – d(i) is 0 or 1 Figure 7.20 Noise na(t) i ⋅T d(i) gTx(t) gRx(t) r (iT ) = r0 (iT ) + n(iT ) S → max ? N EE 541/451 Fall 2006
- 2. Matched Filter Input signal s(t)+n(t) Maximize the sampled SNR=s(T0)/n(T0) at time T0 EE 541/451 Fall 2006
- 3. Matched filter example Received SNR is maximized at time T0 S Matched Filter: optimal receive filter for maximized N example: gTx (t ) gTx (−t ) gTx (T0 − t ) = g Rx (t ) T0 t T0 t T0 t transmit filter receive filter (matched) EE 541/451 Fall 2006
- 4. Equalizer When the channel is not ideal, or when signaling is not Nyquist, There is ISI at the receiver side. In time domain, equalizer removes ISR. In frequency domain, equalizer flat the overall responses. In practice, we equalize the channel response using an equalizer EE 541/451 Fall 2006
- 5. Zero-Forcing Equalizer The overall response at the detector input must satisfy Nyquist’s criterion for no ISI: The noise variance at the output of the equalizer is: – If the channel has spectral nulls, there may be significant noise enhancement. EE 541/451 Fall 2006
- 6. Transversal Transversal Zero-Forcing Equalizer If Ts<T, we have a fractionally-spaced equalizer For no ISI, let: EE 541/451 Fall 2006
- 7. Zero-Forcing Equalizer continue Zero-forcing equalizer, figure 7.21 and example 7.3 Example: Consider a baud-rate sampled equalizer for a system for which Design a zero-forcing equalizer having 5 taps. EE 541/451 Fall 2006
- 8. MMSE Equalizer In the ISI channel model, we need to estimate data input sequence xk from the output sequence yk Minimize the mean square error. EE 541/451 Fall 2006
- 9. Adaptive Equalizer Adapt to channel changes; training sequence EE 541/451 Fall 2006
- 10. Decision Feedback Equalizer To use data decisions made on the basis of precursors to take care of postcursors Consists of feedforward, feedback, and decision sections (nonlinear) DFE outperforms the linear equalizer when the channel has severe amplitude distortion or shape out off. EE 541/451 Fall 2006
- 11. Different types of equalizers Zero-forcing equalizers ignore the additive noise and may significantly amplify noise for channels with spectral nulls Minimum-mean-square error (MMSE) equalizers minimize the mean- square error between the output of the equalizer and the transmitted symbol. They require knowledge of some auto and cross-correlation functions, which in practice can be estimated by transmitting a known signal over the channel Adaptive equalizers are needed for channels that are time-varying Blind equalizers are needed when no preamble/training sequence is allowed, nonlinear Decision-feedback equalizers (DFE’s) use tentative symbol decisions to eliminate ISI, nonlinear Ultimately, the optimum equalizer is a maximum-likelihood sequence estimator, nonlinear EE 541/451 Fall 2006
- 12. Timing Extraction Received digital signal needs to be sampled at precise instants. Otherwise, the SNR reduced. The reason, eye diagram Three general methods – Derivation from a primary or a secondary standard. GPS, atomic closk x Tower of base station x Backbone of Internet – Transmitting a separate synchronizing signal, (pilot clock, beacon) x Satellite – Self-synchronization, where the timing information is extracted from the received signal itself x Wireless x Cable, Fiber EE 541/451 Fall 2006
- 13. Example Self Clocking, RZ Contain some clocking information. PLL EE 541/451 Fall 2006
- 14. Timing/Synchronization Block Diagram Figure 2.3 After equalizer, rectifier and clipper Timing extractor to get the edge and then amplifier Train the phase shifter which is usually PLL Limiter gets the square wave of the signal Pulse generator gets the impulse responses EE 541/451 Fall 2006
- 15. Timing Jitter Random forms of jitter: noise, interferences, and mistuning of the clock circuits. Pattern-dependent jitter results from clock mistuning and, amplitude-to-phase conversion in the clock circuit, and ISI, which alters the position of the peaks of the input signal according to the pattern. Pattern-dependent jitter propagates Jitter reduction – Anti-jitter circuits – Jitter buffers – Dejitterizer EE 541/451 Fall 2006
- 16. Bit Error Probability Noise na(t) i ⋅T d(i) gTx(t) gRx(t) r0 (i T ) + n(iT ) We assume: • binary transmission with d (i ) ∈ {d 0 , d1} • transmission system fulfills 1st Nyquist criterion • noise n(iT), independent of data source p N (n ) Probability density function (pdf) of n(iT) Mean and variance n EE 541/451 Fall 2006
- 17. Conditional pdfs The transmission system induces two conditional pdfs depending on d (i ) • if d (i ) = d 0 • if d (i ) = d1 p0 ( x ) = p N ( x − d 0 ) p1 ( x) = p N ( x − d1 ) p0 ( x ) p1 ( x) x d0 d1 x EE 541/451 Fall 2006
- 18. Probability of wrong decisions Placing a threshold S p0 ( x ) p1 ( x) Probability of wrong decision x x d0 S S d1 ∞ S Q0 = ∫ p0 ( x) dx Q1 = ∫ p ( x)dx 1 S −∞ When we define P0 and P1 as equal a-priori probabilities of d 0 and d1 (P0 = P = 1 ) we will get the bit error probability 1 2 ∞ S S Pb = P0Q0 + P Q1 = 1 1 2 ∫s p ( x)dx + ∫ p ( x)dx = S 0 1 2 −∞ 1 1 2 + ∫[ −∞ 1 2 p1 ( x) − 1 p0 ( x ) ] dx 2 1 24 4 3 S 1− ∫ p0 ( x ) dx −∞ EE 541/451 Fall 2006
- 19. Conditions for illustrative solution 1 d 0 + d1 With P1 = P0 = and pN (− x) = pN ( x) ⇒ S= 2 2 S 1 S Pb = 1 + ∫ p1 ( x) dx − ∫ p0 ( x ) dx 2 −∞ −∞ d 0 − d1 d +d S ′= S S= 0 1 S 2 2 ∫ p ( x) dx = ∫ p 1 N ( x − d1 )dx ∫ p ( x) dx 1 = ∫p N ( x ′ )d x ′ equivalently −∞ −∞ −∞ −∞ S with substituting x −d1 = x ′ d −d d −d ∫ p0 ( x ) dx = d +d 0 1 1 0 2 −∞ for x =S = 0 1 1 2 1 2 = + ∫ p N ( x ′ )d x ′ = − ∫ p N ( x ′ )d x ′ d1 − d 0 d 0 + d1 d 0− d 1 2 0 2 0 1 2 ⇒S ′ = − d1= + ∫ p N ( x ' ) dx ' 2 2 d −d 1 0 2 0 1 2 Pb = 1 − 2 ∫ p N ( x )dx 2 0 EE 541/451 Fall 2006
- 20. Special Case: Gaussian distributed noise Motivation: • many independent interferers • central limit theorem • Gaussian distribution d1− d 0 n 2 x 2 − 2 − 1 1 2 e 2σ ∫ 2 2σ pN ( n ) = 2 N Pb = 1 − e dx N 2π σ N 2 2π σ N 0 0 1 24 4 3 no closed solution Definition of Error Function and Error Function Complement x 2 − x′ 2 erf( x) = ∫ e d x′ π 0 erfc( x) = 1 − erf( x ) EE 541/451 Fall 2006
- 21. Error function and its complement function y = Q(x) y = 0.5*erfc(x/sqrt(2)); 2.5 erf(x) erfc(x) 2 1.5 erf(x), erfc(x) 1 0.5 0 -0.5 -1 -1.5 -3 -2 -1 0 1 2 3 x EE 541/451 Fall 2006
- 22. Bit error rate with error function complement d1 − d 0 x2 1 2 1 2 − 1 d − d0 ∫ 2 2σ N Pb = 1 − e d x Pb = erfc 1 2 π 2σ N 0 2 2 2σ N Expressions with E S and N 0 antipodal: d1 = + d ; d 0 = − d unipolar d1= + d ; d 0 = 0 1 d −d 1 d 1 d 1 d2 Pb = erfc 1 0 = erfc Pb = erfc 2 2σ = erfc 2 2 2 2σ 2 2σ 2 8σ N 2 N N N 1 d2 1 SNR 1 d2 / 2 1 SNR = erfc = erfc = erfc = erfc 2 2σ N 2 2 2 2 4σ N 2 2 4 d2 ES d2 / 2 ES SNR = 2 = SNR = 2 = σN matched N / 2 0 σ N matched N 0 / 2 1 ES 1 ES Pb = erfc N Q function Pb = erfc 2 0 2 2 N0 EE 541/451 Fall 2006
- 23. Bit error rate for unipolar and antipodal transmission BER vs. SNR theoretical -1 10 simulation unipolar -2 10 BER antipodal -3 10 -4 10 -2 0 2 4 6 8 10 ES in dB N0 EE 541/451 Fall 2006