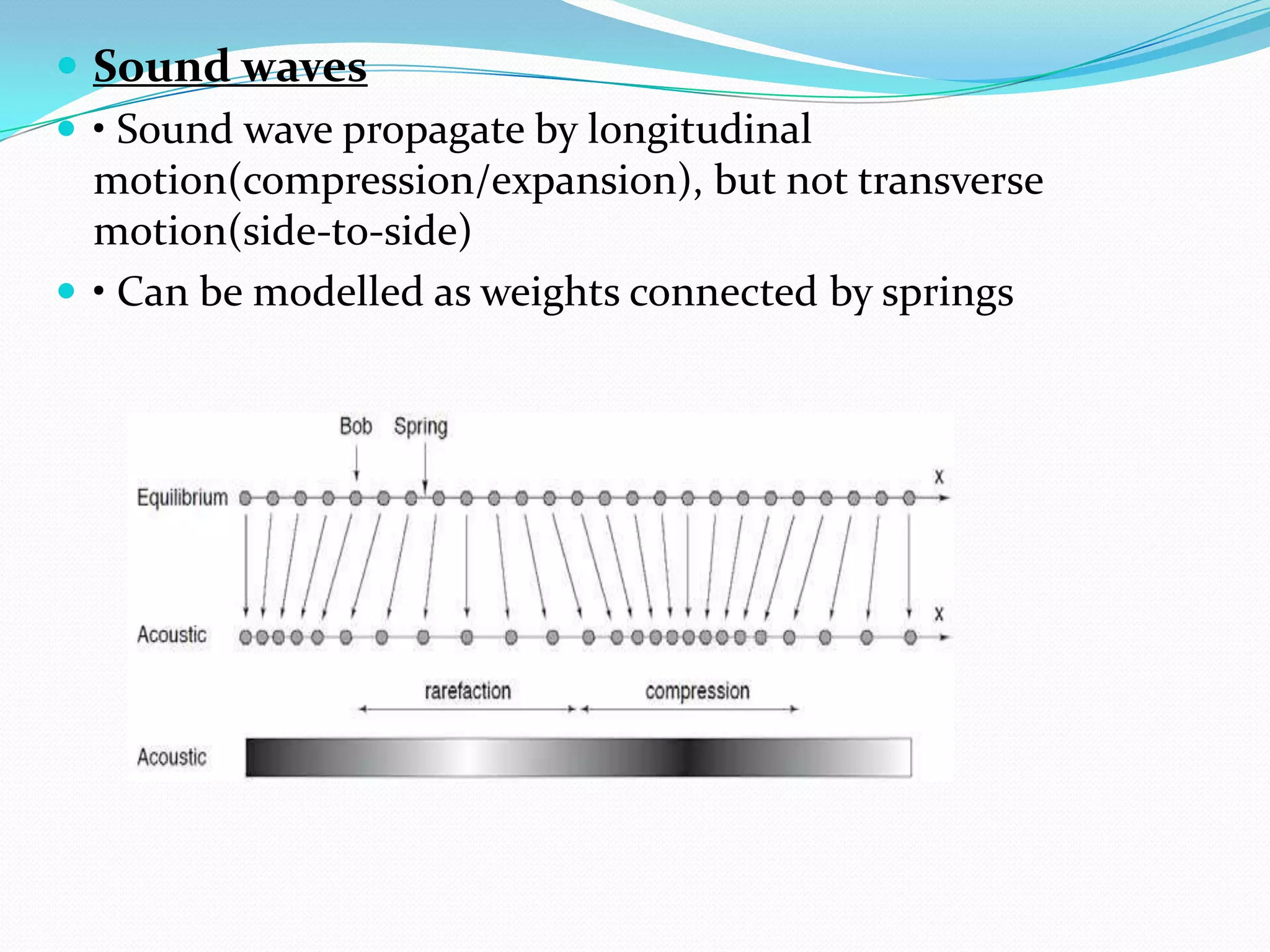
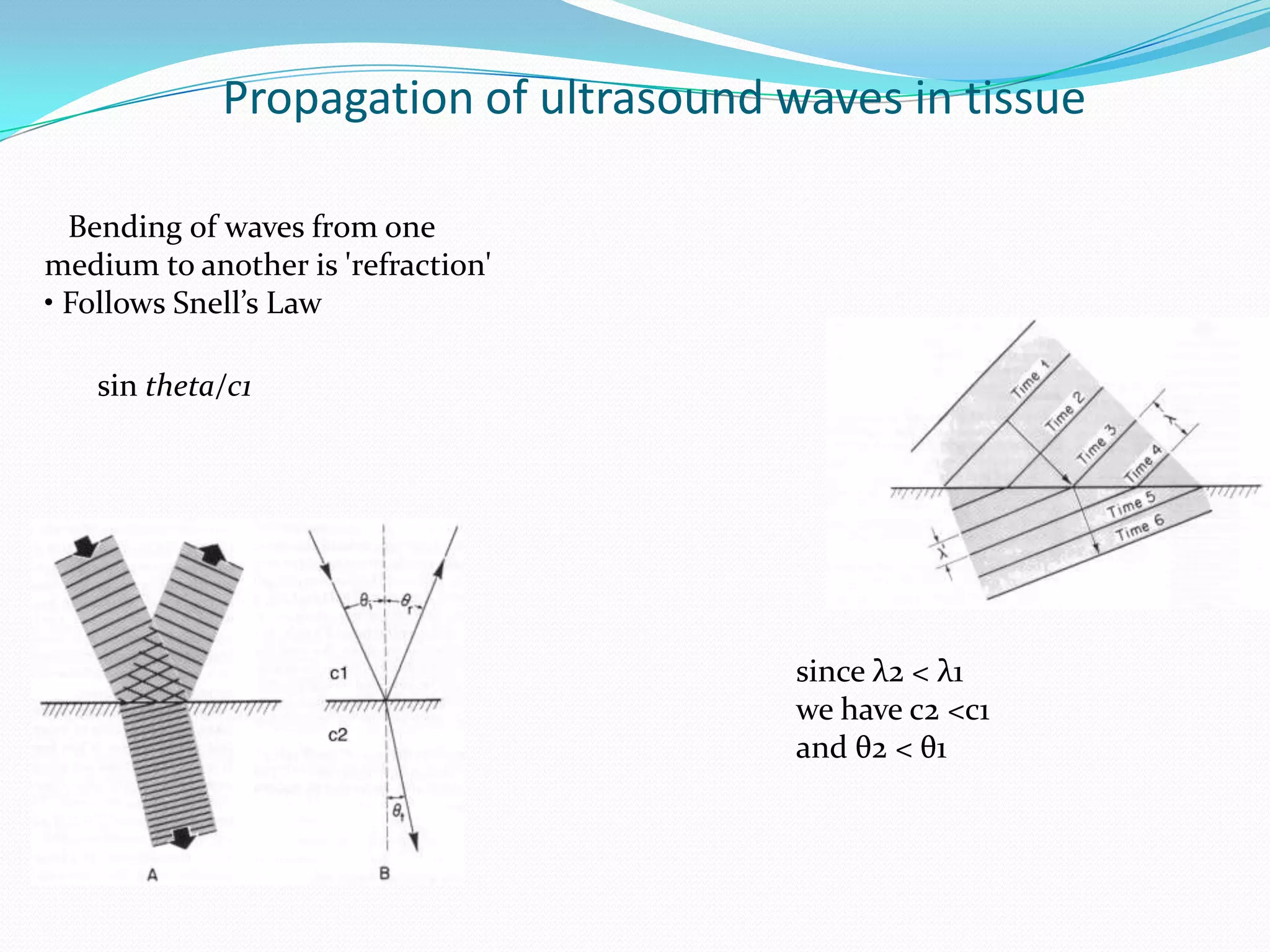
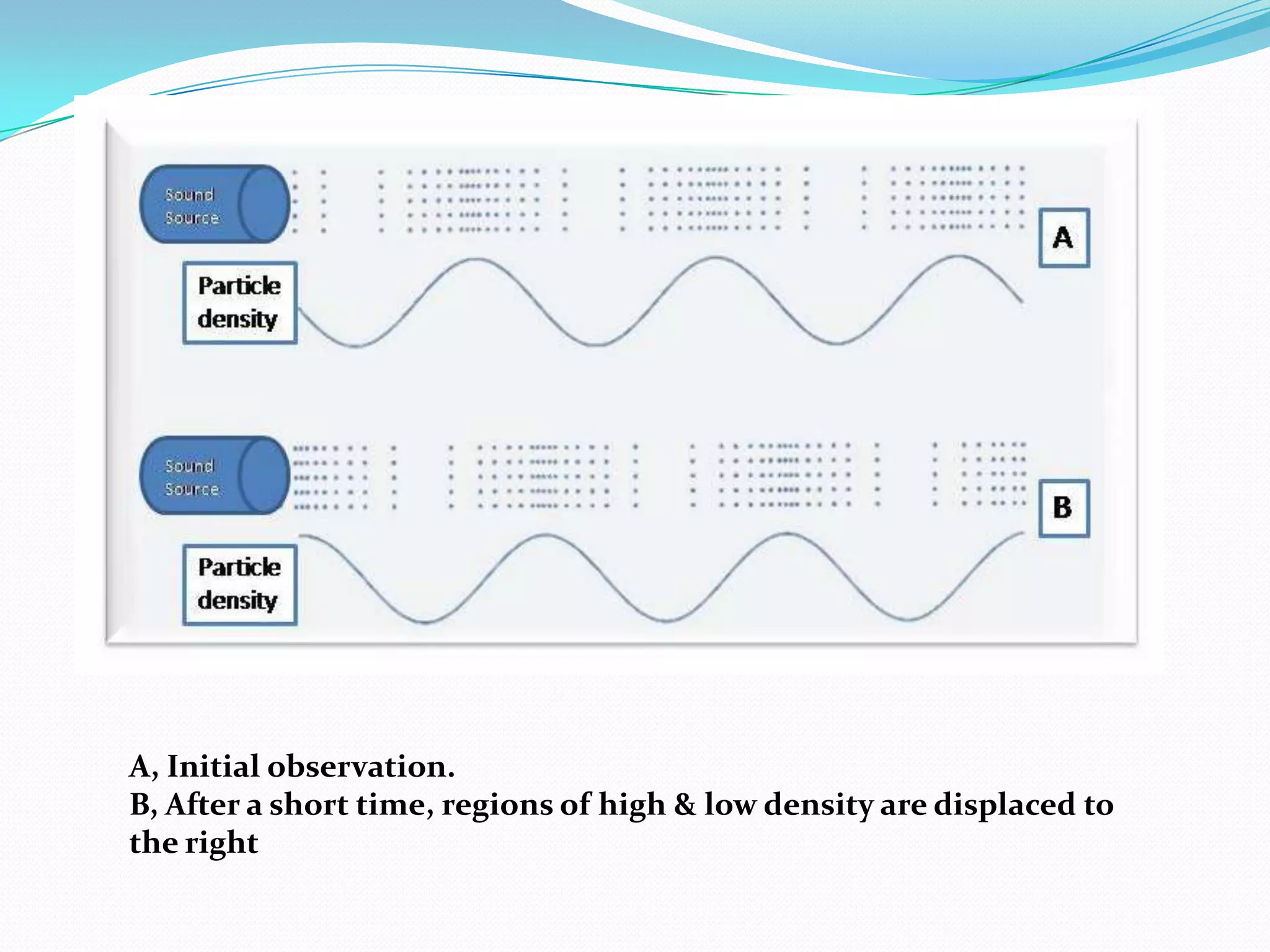
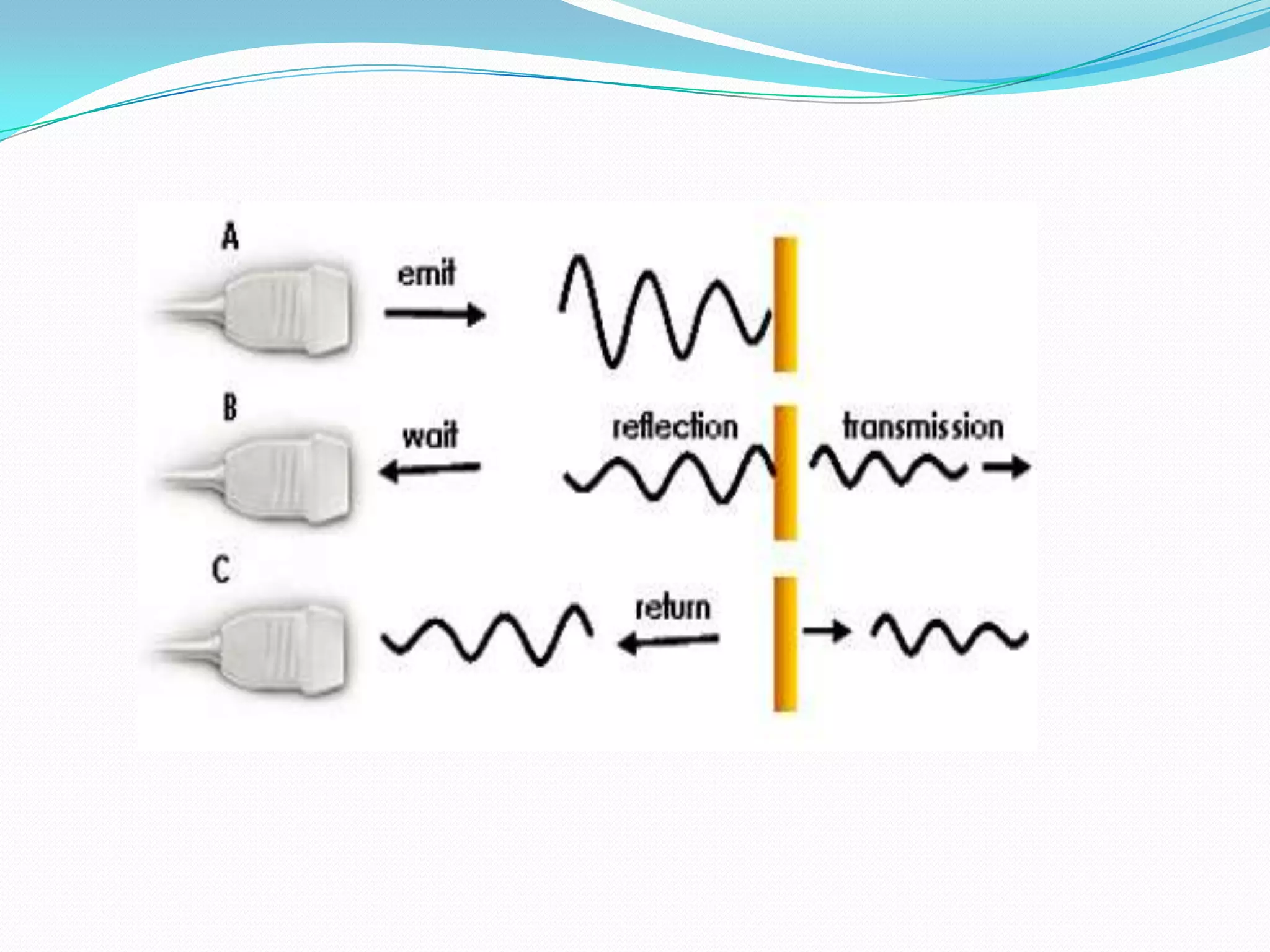
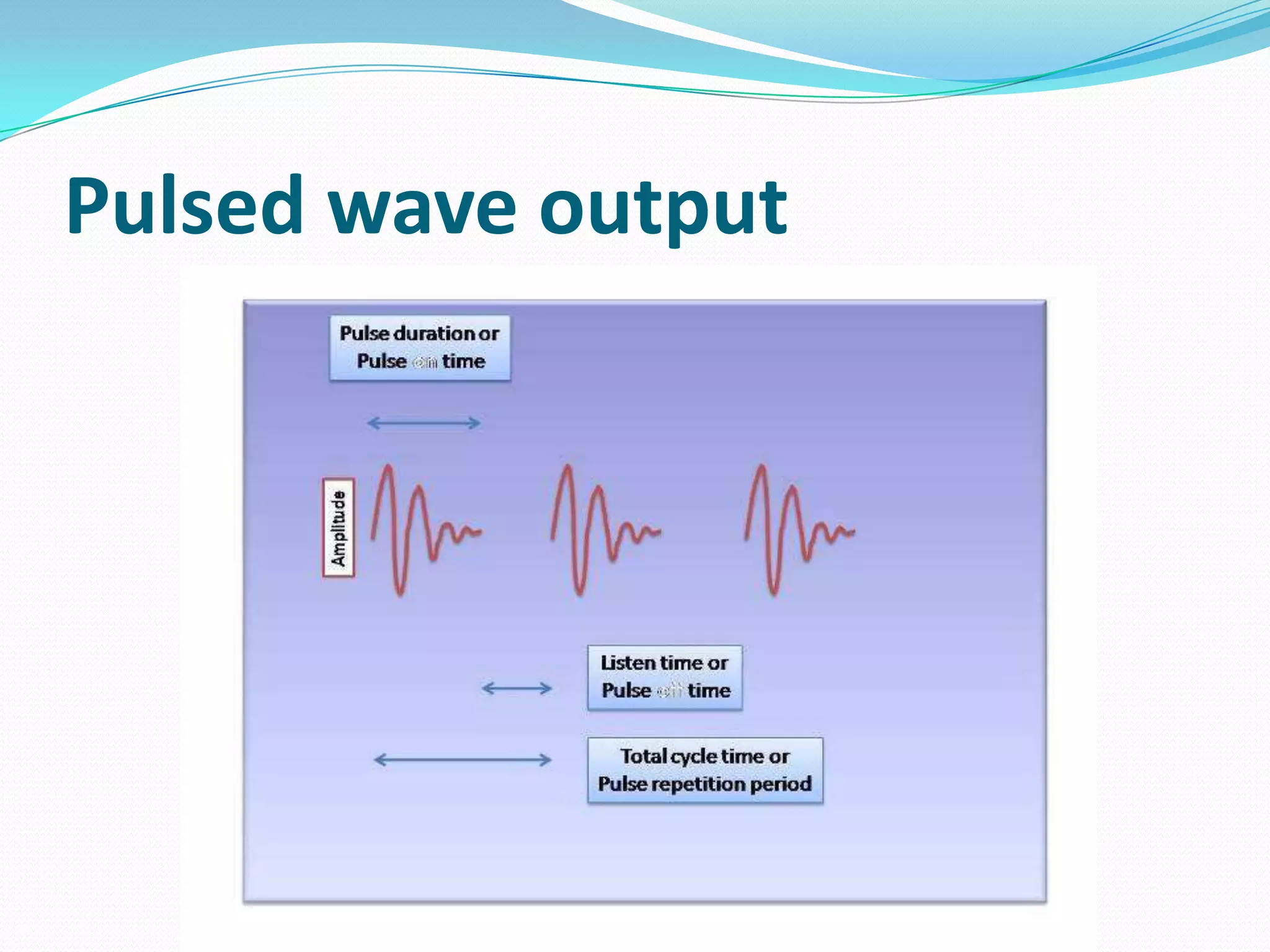
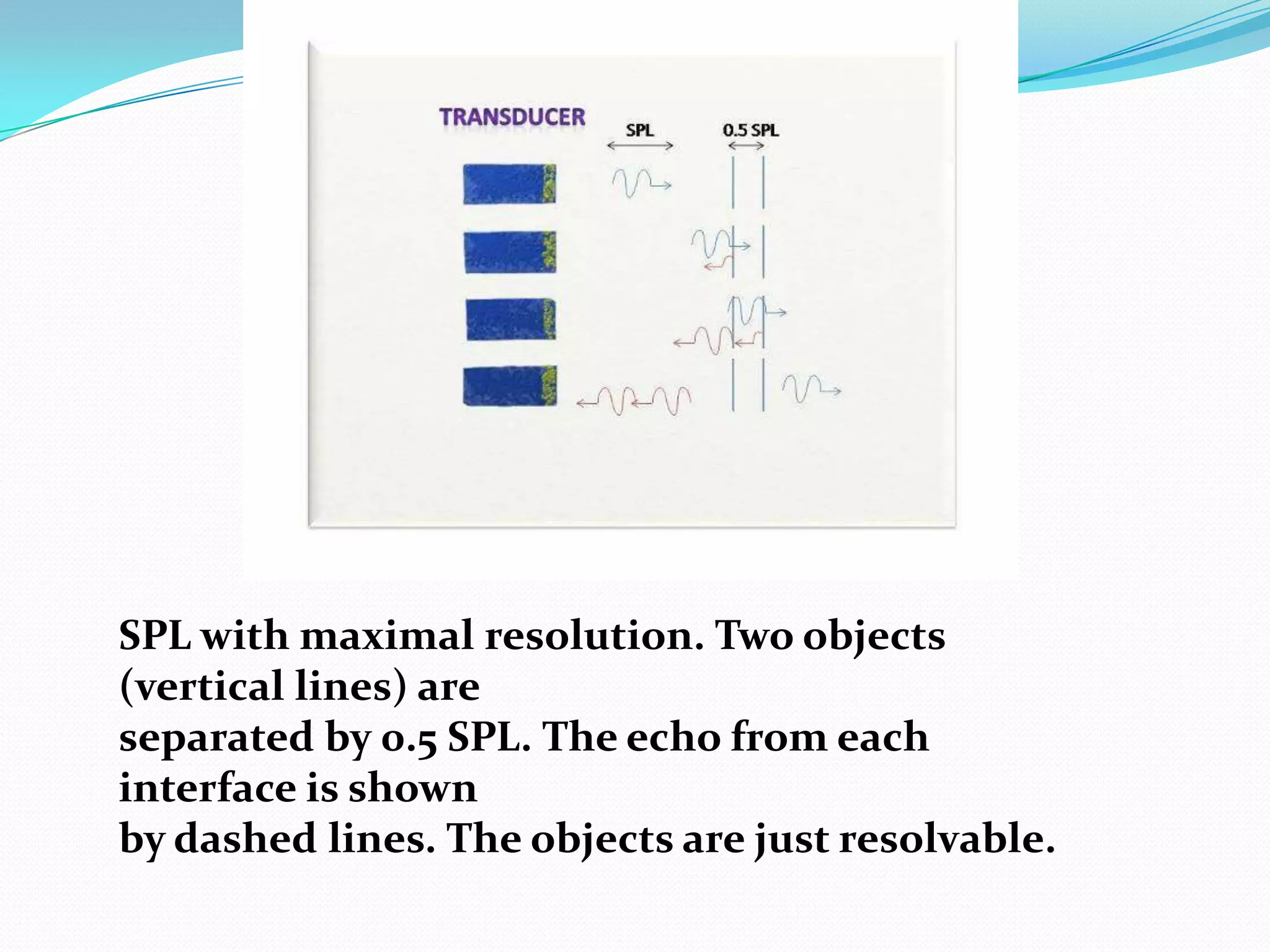
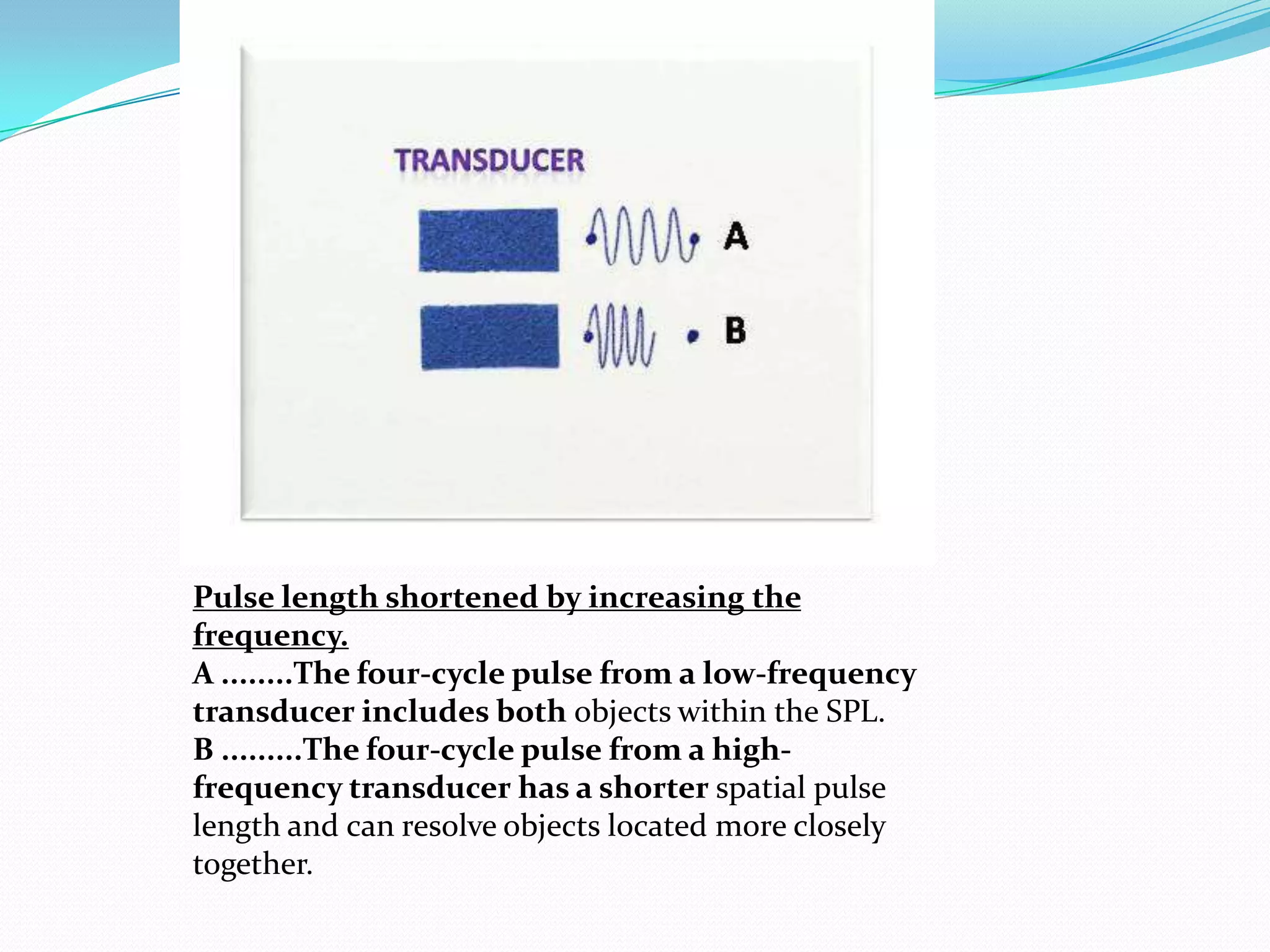
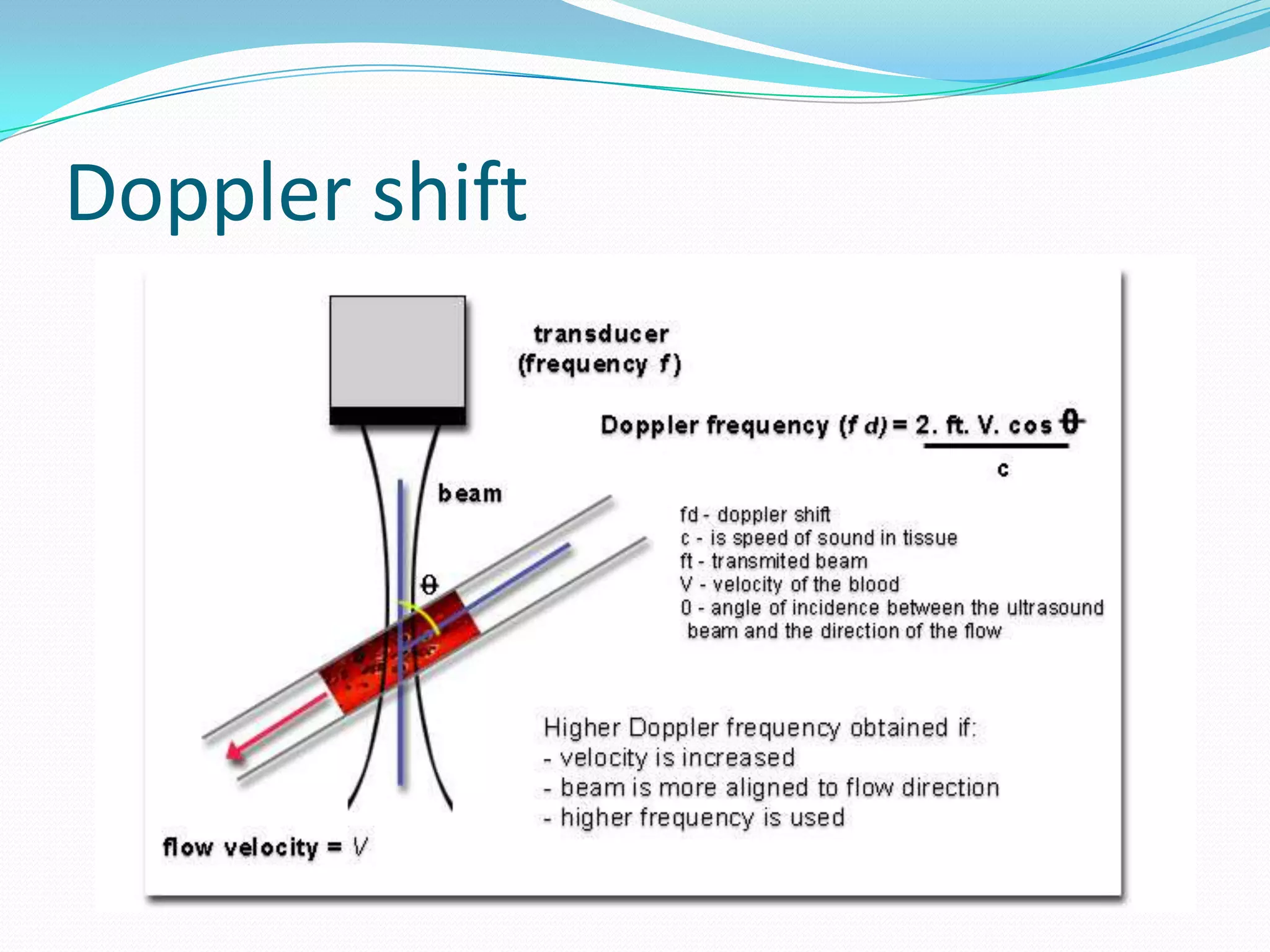
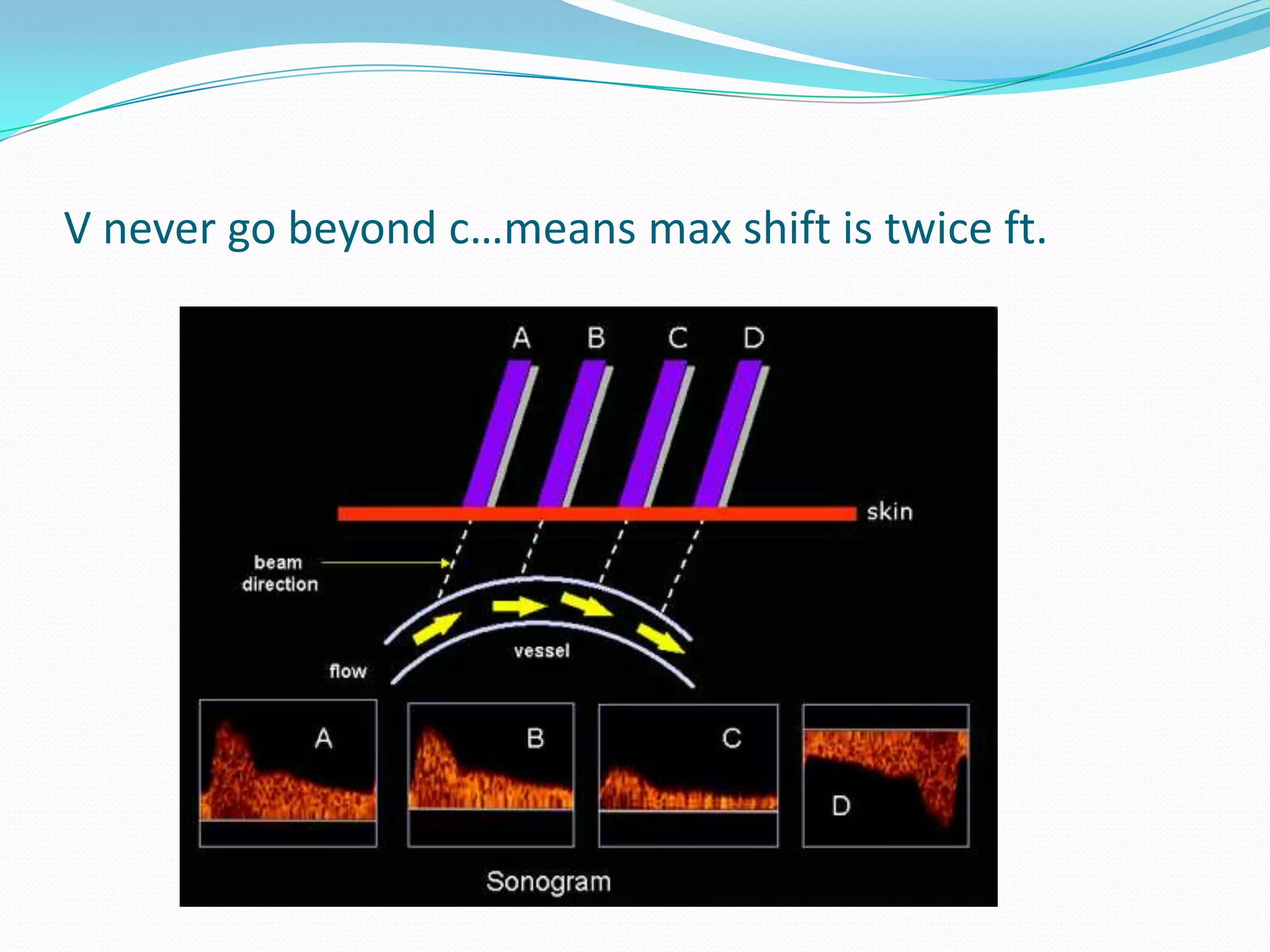
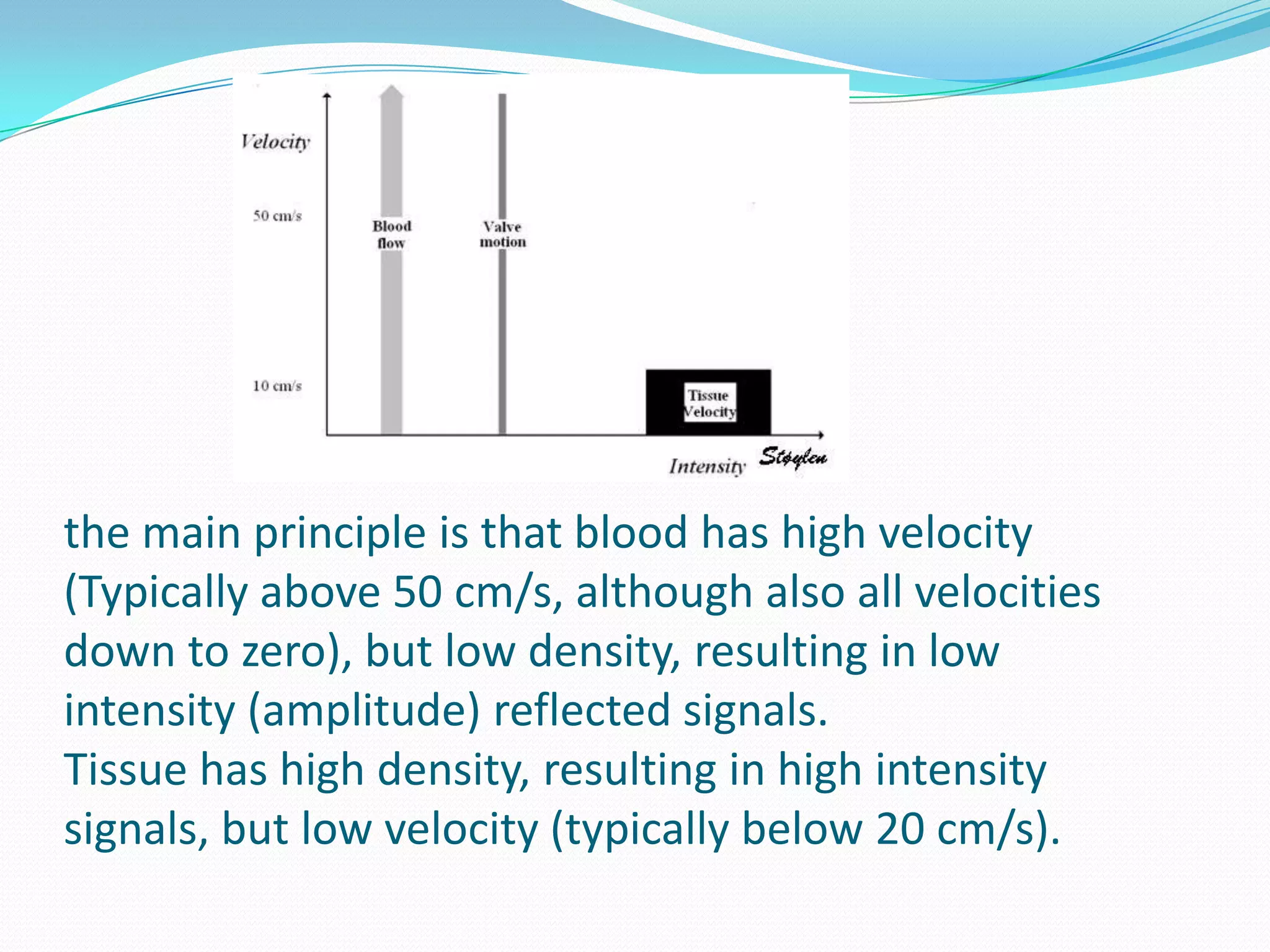
The document discusses ultrasound technology including its history, basic principles, imaging modes, transducer types, and diagnostic applications. It provides details on how ultrasound works by sending sound waves into the body and analyzing the echoes. Key points covered include pulse echo imaging, Doppler imaging, resolution, propagation of ultrasound in tissue, and common ultrasound machines and transducer types.