Transferir como PDF, PPTX

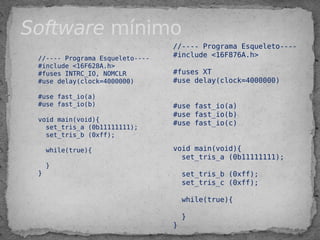
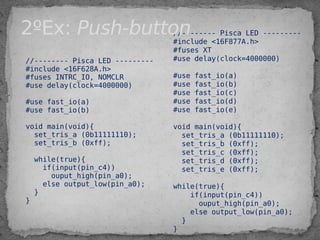
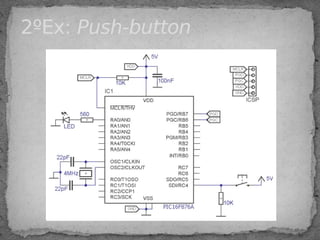

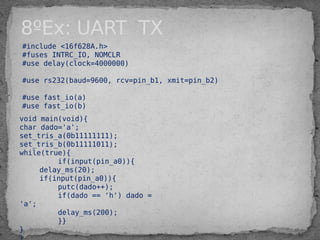
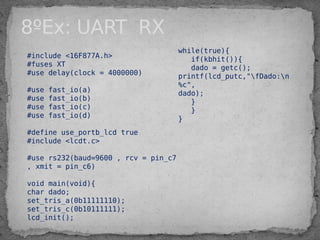
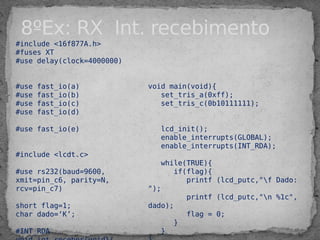
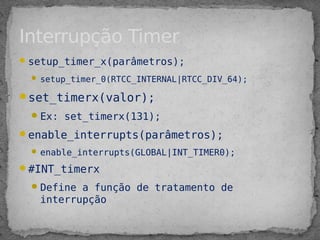
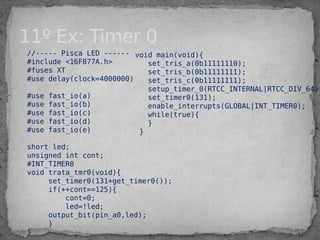


1. O documento descreve um curso sobre microcontroladores PIC, abordando programação em C, hardware e software básicos, periféricos como LCD, ADC, UART, interrupções e timer. 2. São apresentadas estruturas, características, funções e exemplos de código para configurar e utilizar os recursos dos PICs. 3. O curso tem o objetivo de ensinar conceitos e aplicações práticas relacionadas a microcontroladores PIC16F628A e PIC16F876A.