
Recomendados
Mais conteúdo relacionado
Destaque
Destaque (14)
Diana alejandra leal mapa c.
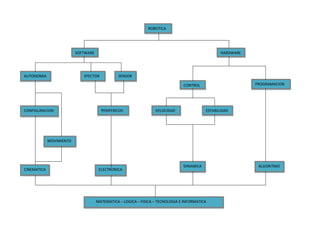
- 1. ESTABILIDADVELOCIDADALGORITMOPROGRAMACIONDINAMICACONTROLCINEMATICASENSOREFECTORAUTONOMIAELECTRONICA MATEMATICA – LOGICA – FISICA – TECNOLOGIA E INFORMATICAHARDWAREMOVIMIENTO CONFIGURACIONPERIFERICOSROBOTICASOFTWARE<br />