Transferir como PDF, PPTX


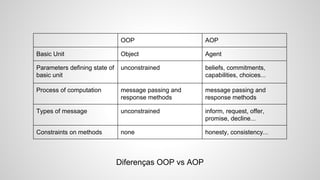

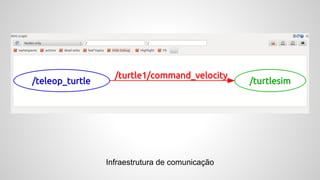



O documento discute a integração de sistemas robóticos com agentes, abordando a programação orientada a agentes e suas diferenças em relação à programação orientada a objetos. Apresenta também a plataforma ROS como um framework para desenvolver software de robôs e descreve um experimento com o turtlesim que demonstra a viabilidade da união entre ROS e Java por meio do jrosbridge. Conclui que agentes podem ser programados para múltiplas funções, facilitando a criação de robôs multifunção.
















