

Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (20)
Semelhante a Pwm
Semelhante a Pwm (20)
Mais de negocio familiar
Pwm
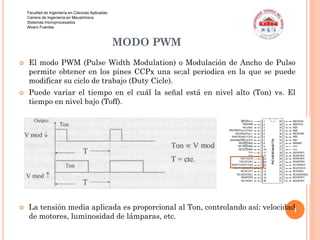
- 1. Facultad de Ingeniería en Ciencias Aplicadas Carrera de Ingeniería en Mecatrónica Sistemas microprocesados Alvaro Fuentes MODO PWM El modo PWM (Pulse Width Modulation) o Modulación de Ancho de Pulso permite obtener en los pines CCPx una se;al periodica en la que se puede modificar su ciclo de trabajo (Duty Cicle). Puede variar el tiempo en el cuál la señal está en nivel alto (Ton) vs. El tiempo en nivel bajo (Toff). La tensión media aplicada es proporcional al Ton, controlando así: velocidad 1 de motores, luminosidad de lámparas, etc.
- 2. Facultad de Ingeniería en Ciencias Aplicadas Carrera de Ingeniería en Mecatrónica Sistemas microprocesados Alvaro Fuentes MODO PWM El pin RCy del PIC16F87xA debe estar configurado como salida, mediante a configucación TRIS correspondiente. La resolución de salida es de 10 bits. El período de la señal PWM se obtiene de configurar el Timer2 y el contenido del registro PR2 (0x92). Este registro contiene los 8 bits más significativos de los 10 bits. Para calcular el período de la señal PWM se utiliza la ecuación: 2 Tpwm = (PR2+1).4 .Tosc.(Valor PreescalerTMR2)
- 3. Facultad de Ingeniería en Ciencias Aplicadas Carrera de Ingeniería en Mecatrónica Sistemas microprocesados Alvaro Fuentes MODO PWM El ciclo de trabajo o anchura de pulso (duty cicle) es el valor del registro CCPxL antes de comenzar un nuevo período. A compararse con el valor del registro del Timer2. Para calcular el ciclo de trabajo se utiliza la ecuación: PWM Duty cicle = (CCPRxL:CCPxCON(5:4)).Tosc.ValorPreescalerTMR2 Los registro CCPRxL y los bits CCPxCON pueden escribirse en cualquier momento, per no se cargan hasta que finalice el periodo de onda PWM (se produce una igualdad entre PR2 y TMR2) 3
- 4. Facultad de Ingeniería en Ciencias Aplicadas Carrera de Ingeniería en Mecatrónica Sistemas microprocesados Alvaro Fuentes MODO PWM La máxima resolución (número máximo de bits que resultan útiles para definir el ciclo de trabajo) que se puede obtener para una onda PWM generada en este módulo, viene dada por la siguiente relación: Resolución = 2N xTOSCxPrescalerTMR2, de donde se tiene: N = lg (FOSC/FPWMxPrescalerTMR2) / lg2 4
- 5. Facultad de Ingeniería en Ciencias Aplicadas Carrera de Ingeniería en Mecatrónica Sistemas microprocesados Alvaro Fuentes MODO PWM Por ejemplo, para una frecuencia PWM de 1,22kHz con un preescaler TMR2 de 16 y una frecuencia de reloj de 20MHz: Calcular PR2: 1/1220 = (PR2+1)*4*(1 / 20x10^6)*16 PR2=255 (0xFF) Calcular la Resolución: Resolución= lg(20x10^6 / 1200) / lg2 Resolución > 10 bits 5
- 6. Facultad de Ingeniería en Ciencias Aplicadas Carrera de Ingeniería en Mecatrónica Sistemas microprocesados Alvaro Fuentes MODO PWM Para poner en marcha el modo PWM se deben dar los siguientes pasos: 1. Configurar el período PWM cargando el oportuno valor en PR2 2. Configurar el Duty cicle (anchura del pulso) cargando el registro CCPR1L y los bits CCP1CON<5:4> 3. Configurar la línea CCP1 como salida mediante el TRIS 4. Asignar el valor del preescaler TMR2 y habilitarlo escribiendo en T2CON 5. Configurar el módulo CCP en modo PWM. 6
- 7. Facultad de Ingeniería en Ciencias Aplicadas Carrera de Ingeniería en Mecatrónica Sistemas microprocesados Alvaro Fuentes EL MODULO CCP EN MODO PWM EN LENGUAJE C Configuración del módulo CCPx: Setup_ccpx(modo); - donde modo es del tipo indicado en la tabla. modo PWM PWM_PLUS_1 PWM_PLUS_2 PWM_PLUS_3 CCPxCON 00001100 00011100 00101100 00111100 Definición del ciclo de trabajo: Set_pwmx_duty(valor); define el ciclo de trabajo, donde valor es un dato de 8 o 16 bits bits que determina el ciclo de trabajo. En la configuración del TMR2, el postscaler deber valer 1. 7
- 8. Facultad de Ingeniería en Ciencias Aplicadas Carrera de Ingeniería en Mecatrónica Sistemas microprocesados Alvaro Fuentes EJEMPLO PWM Configurar el módulo CCP1 y CCP2 en modo PWM y generar una señal PWM de 10Khz con ciclo de servicio de 75% y 25%. Según el estado de RA0 se obtienen 2 salidas simétricas pero complementarias. 8
- 9. Facultad de Ingeniería en Ciencias Aplicadas Carrera de Ingeniería en Mecatrónica Sistemas microprocesados Alvaro Fuentes MODO PWM ESPECIFICACIONES: Fosc 4Mhz Ciclo instrucción 1uS Frec. PWM 10Khz Período PWM 100uS (0.1mS) Duty Cycle 75% y 25% Pin de salida PWM1 RC2/CCP1 Pin de salida PWM2 RC1/CCP2 Diagrama de tren de pulsos señal con DC = 75% Diagrama de tren de pulsos señal con DC = 25% 9
- 10. Facultad de Ingeniería en Ciencias Aplicadas Carrera de Ingeniería en Mecatrónica Sistemas microprocesados Alvaro Fuentes MODO PWM FUNCIONAMIENTO El sistema generará una señal PWM utilizando el módulo CCP1 y CCP2 por medio del pin RC2/CCP1 y RC1/CCP2. De acuerdo al estado del pin RA0, se generarán 2 salidas PWM de igual frecuencia, pero complementarias, conforme a la siguiente tabla. 10
- 11. Facultad de Ingeniería en Ciencias Aplicadas Carrera de Ingeniería en Mecatrónica Sistemas microprocesados Alvaro Fuentes MODO PWM 11
- 12. Facultad de Ingeniería en Ciencias Aplicadas Carrera de Ingeniería en Mecatrónica Sistemas microprocesados Alvaro Fuentes EJEMPLO PWM 12