
Recomendados
Mais conteúdo relacionado
Semelhante a Chilquillo.pptx
Semelhante a Chilquillo.pptx (20)
Último
Último (20)
Chilquillo.pptx
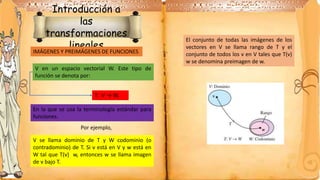
- 1. Introducción a las transformaciones lineales IMÁGENES Y PREIMÁGENES DE FUNCIONES V en un espacio vectorial W. Este tipo de función se denota por: En la que se usa la terminología estándar para funciones. T: V → W. El conjunto de todas las imágenes de los vectores en V se llama rango de T y el conjunto de todos los v en V tales que T(v) w se denomina preimagen de w. V se llama dominio de T y W codominio (o contradominio) de T. Si v está en V y w está en W tal que T(v) w, entonces w se llama imagen de v bajo T. Por ejemplo,
- 2. TRANSFORMACIONES LINEALES Definición de transformación lineal Sean V y W espacios vectoriales. La función Se llama transformación lineal de V en W si las dos propiedades siguientes son verdaderas para todo u y v en V y para cualquier escalar c. 𝑇: 𝑉 → 𝑊 Se dice que una transformación lineal conserva operaciones porque se obtiene el mismo resultado si las operaciones de suma y multiplicación escalar se efectúan antes o después de que se aplique la transformación lineal. Aunque se utilizan los mismos símbolos para denotar las operaciones vectoriales tanto en V como en W, debe observar que las operaciones pueden ser diferentes, como se indica en el siguiente diagrama. 1.- 𝑇 𝑢 + 𝑣 = 𝑇 𝑢 + 𝑇(𝑣) 2.-T c u = cT(u)
- 3. Propiedades de las transformaciones lineales Sea T una transformación lineal de V en W, donde u y v están en V. Entonces, las propiedades siguientes son verdaderas. 1.- 𝑇(0) 2.- 𝑇 −𝑣 = −𝑇 𝑣 3.- 𝑇 𝑢 − 𝑣 = 𝑇 𝑢 − 𝑇(𝑣) 4.- 𝐼𝑓 𝑣 = 𝑐1𝑣1 + 𝑐2𝑣2 + ⋯ + 𝑐𝑛𝑣𝑛 Entonces 𝑇 𝑣 = 𝑇(𝑐1𝑣1 + 𝑐2𝑣2 + ⋯ + • Para demostrar la primera propiedad, observe que 0𝑣 = 0. Entonces, se concluye que 𝑇 0 = 𝑇 0𝑣 0𝑇 𝑣 = 0 • La segunda propiedad se concluye de – 𝑣 = (– 1)𝑣, que implica que 𝑇 −𝑣 = 𝑇 −1 𝑣 = −1 𝑇 𝑣 = −𝑇( 𝑣) • La tercera propiedad se concluye de que 𝑢 – 𝑣 = 𝑢 (– 𝑣), que implica que 𝑇 𝑢 − 𝑣 = 𝑇 𝑢 + −1 𝑣 = 𝑇 𝑢 + −1 𝑇 𝑣 = 𝑇 𝑢 − 𝑇(𝑣)
- 4. La transformación lineal definida por una matriz Sea a una matriz de m n. La función T definida por es una transformación lineal de 𝑅𝑛 𝑎 𝑅𝑚 . Para formar la multiplicación matricial con una matriz de m n, los vectores en 𝑅𝑛 se representan por matrices de 𝑛 𝑥 1 y los vectores en 𝑅𝑚 se representan por matrices de m 𝑥 1 . 𝑇 𝑣 = 𝐴𝑣 Asegúrese de comprender que una matriz a de m n define una transformación lineal de 𝑅𝑛 𝑎 𝑅𝑚 . 𝐴𝑣 = 𝑎11 𝑎21 ⋮ 𝑎𝑚1 𝑎12 … 𝑎1𝑛 𝑎22 ⋮ … 𝑎2𝑛 ⋮ 𝑎𝑚2 … 𝑎𝑚𝑛 𝑣1 𝑣2 ⋮ 𝑣𝑛 = 𝑎11𝑣1 𝑎21𝑣1 ⋮ 𝑎𝑚1𝑣1 + + . + 𝑎12𝑣2 + ⋯ + 𝑎1𝑛𝑣𝑛 𝑎22𝑣2 + ⋯ + 𝑎2𝑛𝑣𝑛 ⋮ 𝑎𝑚2𝑣2 . + ⋯ + ⋮ 𝑎𝑚𝑛𝑣𝑛 Vector en 𝑅𝑁 Vector en 𝑅𝑀