PWM Step-down Converter(NJM2309)
•Transferir como PPTX, PDF•
0 gostou•1,207 visualizações

PWM Step-down Converter(NJM2309). Concept kit provided by Bee Technologies.
![Contents Design Specification NJM2309 Typical Application Circuit Averaged Buck Switch Model Buck Regulator Design Workflow Setting PWM Controller’s Parameters. Programming Output Voltage: Rupper, Rlower Inductor Selection: L Capacitor Selection: C, ESR Stabilizing the Converter Load Transient Response Simulation ,[object Object],Appendix Type 2 Compensation Calculation using Excel Feedback Loop Compensators Simulation Index All Rights Reserved Copyright (C) Bee Technologies Corporation 2011 2](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (20)
Semelhante a PWM Step-down Converter(NJM2309)
Semelhante a PWM Step-down Converter(NJM2309) (20)
Mais de Tsuyoshi Horigome
Mais de Tsuyoshi Horigome (20)
Último
Último (20)
PWM Step-down Converter(NJM2309)
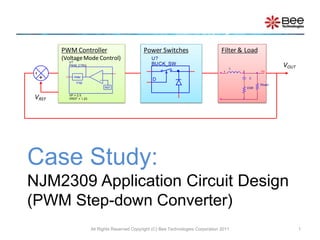
- 1. Case Study:NJM2309 Application Circuit Design (PWM Step-down Converter) All Rights Reserved Copyright (C) Bee Technologies Corporation 2011 1
- 4. VIN, MIN = 6 (V)
- 5. VOUT = 3.3 (V)
- 6. VOUT, Ripple = 1% ( 33mVP-P )
- 7. IOUT, MAX = 1.0 (A)
- 9. Switching Frequency – fosc = 105 (kHz)All Rights Reserved Copyright (C) Bee Technologies Corporation 2011 3 NJM2309 Datasheet
- 10. NJM2309 Typical Application Circuit All Rights Reserved Copyright (C) Bee Technologies Corporation 2011 4 Power Switches Filter & Load PWM Controller Schematic is captured from NJM2309 datasheet page 4.
- 11. All Rights Reserved Copyright (C) Bee Technologies Corporation 2011 5 TASK: Design and Evaluation of the Circuit 3? 2? 1 4? 5? NJM2309 Typical Application Circuit
- 13. Step2: Set C1=1kF, C2=1fF, (always keep the default value) and R2= calculated value (Rupper//Rlower) as the initial values.
- 14. Step3: Select a crossover frequency (about 10kHz or fc < fosc/4). Then complete the table.
- 15. Step4: Read the Gain and Phase value at the crossover frequency (10kHz) from the Bode plot, Then put the values to the table
- 16. Step5: Select the phase margin at the fc ( > 45 ). Then change the K value until it gives the satisfied phase margin, for this example K=6 is chosen for Phase margin = 46.
- 17. Remark: If K-factor fail to gives the satisfied phase margin, Increase the output capacitor C then try Step1 to Step5 again.5 Load Transient Response Simulation 6
- 18. Buck Regulator Design Workflow All Rights Reserved Copyright (C) Bee Technologies Corporation 2011 7 3 4 5 2 1
- 24. All Rights Reserved Copyright (C) Bee Technologies Corporation 2011 13 Stabilizing the Converter (NJM2309) 5 The element of the Type 2 compensator ( R2, C1, and C2 ), that stabilize the converter, can be extracted by using Type 2 Compensator Calculator (Excel sheet) and open-loop simulation with the Average Switch Models (ac models). Step2 Set C1=1kF, C2=1fF, and R2=calculated value (Rupper//Rlower) as the initial values. Step1 Open the loop with LoL=1kH and CoL=1kF then inject an AC signal to generate Bode plot. C1=1kF is AC shorted, and C2 1fF is AC opened (or Error-Amp without compensator).
- 25. Stabilizing the Converter (NJM2309) All Rights Reserved Copyright (C) Bee Technologies Corporation 2011 14 5 Step3 Select a crossover frequency (about 10kHz or fc < fosc/4 ), for this example, 10kHz is selected. Then complete the table. values from 2 Calculated value of the Rupper//Rlower values from 1
- 26. All Rights Reserved Copyright (C) Bee Technologies Corporation 2011 15 Stabilizing the Converter (NJM2309) 5 Gain: T(s) = H(s)GPWM Step4 Read the Gain and Phase value at the crossover frequency(10kHz) from the Bode plot, Then put the values to the table. Phase atfc Tip: To bring cursor to the fc = 10kHz type “ sfxv(10k) ” in Search Command. Cursor Search
- 27. Stabilizing the Converter (NJM2309) All Rights Reserved Copyright (C) Bee Technologies Corporation 2011 16 5 Step5 Select the phase margin at fc (> 45 ). Then change the K value (start from K=2) until it gives the satisfied phase margin, for this example K=3 is chosen for Phase margin = 48. As the result; R2, C1, and C2 are calculated. Remark: If K-factor fail to gives the satisfied phase margin, Increase the output capacitor C then try Step1 to Step5 again. K Factor enable the circuit designer to choose a loop cross-over frequency and phase margin, and then determine the necessary component values to achieve these results. A very big K value (e.g. K > 100) acts like no compensator (C1 is shorted and C2 is opened).
- 29. C1=0.874nF ,
- 30. C2=97.07pF.*Analysis directives: .AC DEC 100 0.1 10MEG
- 31. All Rights Reserved Copyright (C) Bee Technologies Corporation 2011 18 Stabilizing the Converter (NJM2309) 5 Gain and Phase responses after stabilizing Gain: T(s) = H(s) G(s)GPWM Phase atfc Phase margin = 48.801 at the cross-over frequency - fc = 9.237kHz. Tip: To bring cursor to the cross-over point (gain = 0dB) type “ sfle(0) ” in Search Command. Cursor Search
- 32. Load Transient Response Simulation All Rights Reserved Copyright (C) Bee Technologies Corporation 2011 19 The converter, that have been stabilized, are connected with step-load to perform load transient response simulation. 3 4 5 3.3V/16.5 = 0.2A step to 0.2+0.8=1.0A load 2 *Analysis directives: .TRAN 0 20ms 0 1u 1
- 35. A. Type 2 Compensation Calculation using Excel All Rights Reserved Copyright (C) Bee Technologies Corporation 2011 23
- 36. All Rights Reserved Copyright (C) Bee Technologies Corporation 2011 24 B. Feedback Loop Compensators Type1 Compensator Type2 Compensator Type2a Compensator Type2b Compensator Type3 Compensator