Mais conteúdo relacionado Semelhante a BA-Net: Dense Bundle Adjustment Network (3D勉強会@関東) (20) 2. about.me
@denkiwakame
● 〜2015 京都大学 松山研究室(B4〜M2)
● 〜2017 某企業研
● 2017〜 都内ベンチャー
Interests
● Generalized Camera Calibration [M.Nishimura+,ICCV15]
● MRF optimization (low-level vision)
● Model Compression
● GPGPU (CUDA),SIMD
● Quantum Computing
2
[M.Nishimura+, ICCV15] A Linear Generalized Camera Calibration from Three Intersecting
Reference Planes
3. 前回
● 3D 勉強会@関東 (2018/05/17)
○ https://togetter.com/li/1231482?page=5
3
6. CodeSLAM [M.Bloesch+,CVPR18]
● VAE によって depth の圧縮表現(code)を得る
6
● Pose (R,t) - depth optimization が解ける
○ gauss-newton 法で最適化(ヤコビアンが計算できる)
〜128dim
parametrized depth
pose
photometric error
geometric error
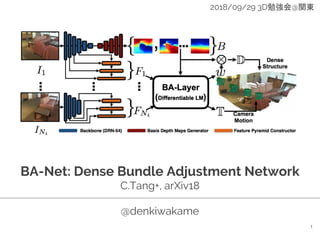
8. BA-Net : Dense Bundle Adjustment Network
● 特徴抽出,depth の圧縮表現学習,バンドル調整を全てNN
で行う
8
SfM の一連の要素を end-to-end でモデリング
9. Bundle Adjustment - バンドル調整とは?
● 基準点とカメラを結ぶ光線束(=bundle)を撮影画像を用いて
調整し,カメラの位置姿勢を最適化する
○ 画像からその背後にある幾何学的なパラメータを推定することが目的
○ 主要な対象は 形状復元や姿勢推定だが,幅広い問題が対象となり得る
9
Bill Triggs, Philip McLauchlan, Richard Hartley and Andrew Fitzgibbon
Bundle Adjustment -- A Modern Synthesis
10. Bundle Adjustment - historical overview
● [T.Bill+,VA99] Bundle Adjustment - a modern
synthesis
10
Triggs, Bill, et al. "Bundle adjustment—a modern synthesis." International workshop on vision
algorithms. Springer, Berlin, Heidelberg, 1999. (鉄板)
11. Bundle Adjustment Revisit
● Geometric BA (e.g. ORB-SLAM)
○ Minimize Feature Reprojection Error
○ sparse
● Photometric BA (e.g. LSD-SLAM)
○ Minimize Photometric Error
○ dense/semi-dense
11
● Feature BA (proposed)
○ Minimize Learned-Feature Reprojection Error
○ dense
12. (1) Geometric BA
● Indirect methods (ORB-SLAM, ….)
○ 再投影誤差を最小化
○ 計算コストが低い
● Drawbacks
○ 画像上の reference point のみ考慮
○ ノイズや歪みに弱い (RANSAC必須)
12
Related Work
13. (2) Photometric BA
● Direct methods (LSD-SLAM, ...)
○ (再投影された) 画素の輝度値の差を最小化
○ テクスチャが疎らな環境でも有効
● Drawbacks
○ 初期値に依存(非凸性が強い)
○ 照明環境の変化に弱い(photometric calib 必須)
○ 動物体など,outlier に弱い
13
Related Work
14. (3) feature BA
● “Learned” direct methods
○ SfM に適する特徴を学習する
○ 再投影された learned-feature F の誤差を最小化
● Improvements
○ 照明環境の変化に頑健な特徴を学習で獲得できる
○ outlier (e.g. moving objects) に強い特徴を獲得
■ それはちょっと言い過ぎでは...?
14
Proposed
camera
parameters
depth
(prameterized)
inference from BA-Net
learned-feature from BA-Net
15. ● Feature learning for SfM (2-view setting)
○ BA-Net の minor contribution
Network overview - feature & depth learning
15
depth parametrization
sub-network
feature pyramid
network
base-network
[F.Yu+,CVPR17]
16. Feature Pyramid
● DRN-54 から階層的な特徴を抽出(like FPN)
○ Ci : pretrained (DRN-54)
○ Fi : learned hierarchical feature
○ 〜128 dim ぐらいが精度のバランスが良かったらしい
16
17. Feature Pyramid
● “learned” feature によってマッチング適する(凸性の高い)
特徴を獲得
○ C3: DRN-54 feature (pretrained on IMAGENET)
○ F3: learned feature
17
18. Depth parametrization
● Why raw depth representation is intractable ?
○ too many parameters to be optimized (intractable)
■ 320x240 pixels input → 76.8k parameters !
■ pose-geo optimization が困難
○ difficulty in initialization
■ R,t のパラメータが不完全な初期状態では,non-overwrapped view に
depth が飛んでいってしまう
■ 個々のdepth を独立に扱う方式ではうまく学習できない
● Autoencoder で parametrize
○ CodeSLAM と異なり,VAE ではなく standard auto-encoder を使う
○ 128 dim の基底ベクトルとして圧縮表現を学習
18
19. ● “differentiable” bundle optimization layer
○ BA-Net の major contribution
Network overview - geometric constraint
19
camera
parameters
depth
(parameterized)
camera pose
loss
depth map
loss
20. Levenverg-Marquardt algorithm revisit
● objective:
● updates:
○ 適当な初期値 x を与える
○ E(x) のヤコビ行列 J ,A=J^TJ の対角行列 D を計算
○ ↓を解いてΔx を算出
○ ΔE = E(x+Δx) - E(x) を計算後,x → x+Δx と更新
20
damping
factor
non-negative
diagonal matrixjacobian of E(x)
この手続きを NN 化し,backprop でパラメータ更新することを考える
21. ● Difficulties:
○ LM法の反復解法は収束閾値に達すると打ち切り
■ 条件分岐を含む非連続関数になってしまう(微分不能)
○ 各反復試行において,目的関数に応じ λ を操作
■ E(x) が減少するまでλを大きくし続ける(減少した際にλを小さくする)
■ 条件分岐(ry
● Simple yet effective approach
○ 固定回数の反復を実装する (※)
○ lambda を network で推論
Differentiable LM layer
21
※ [J.Domke+, AISTATS12] Generic Methods for Optimization-Based Modeling
22. Differentiable LM layer
● previous iteration の x を元に,E(x) を計算
● J(x) をE(x)から計算,D(x) を A=J(x)^TJ(x) から計算
● damping factor λを算出
● λを用いてΔx を算出
22
Δx が F, λ, x の関数として表現
(F について differentiable)
23. Differentiable LM layer
● Lambda-prediction layers
○ 全画素から E(x) を集め,128dim として入力
○ 4層の FC層からなる(ReLU で >0 に強制)
○ E(x) から λに回帰する非線形関数を学習する?
23
※ 古典手法では E(x+Δx) - E(x) の値に応じて
ルールベースでλを設定
24. Differentiable LM layer
● Coarse-to-fine optimization
○ LSD-SLAM [J.ENgel+,ECCV14] や DSO
[J.Engel+,TPAMI17] と同様,Coarse-to-fine BA を適用
○ feature pyramid の各 layer で 5-iteration
○ 計 15-iteration を 1回の forward-pass で反復
24
25. 関連:CRF as RNN
● Semantic Segmentation において, 後段に平均場近似
(mean-field approximation)の手続きをRNNで実装
○ CRFの最適化は post-processing として当初分離されていた
○ RNN で 平均場近似を実装することにより,CRF の学習と最適化が1つのネッ
トワークで行えるようになった
25[S.Zheng+, ICCV15] Conditional Random Fields as Recurrent Neural Networks
26. Training Objective
● Camera Pose Loss
○ 普通の rotation (quaternion), translation loss
● Depth Map Loss
○ berHu Loss [L.Zwald+,arXiv12] が単純なL2ノルムよりも良い
26
27. Dataset
● ScanNet
○ large-scale indoor dataset with 1513 sequences in
706 different scenes
■ training: 1413 sequences (547991 images)
■ testing: 100 sequences (2000 images)
● KITTI
○ generated camera poses from LibVISO2
27
28. Quantitative Evaluation (on ScanNet)
● outperformed DeMoN[B.Ummenhofer+,CVPR17]
○ ours*, DeMoN* : trained on SUN3D dataset
○ 別データ(SUN3D)で trained したモデルでも DeMoN を上回る
● outperformed also geometric/photometric BA
○ geometric BA が苦手な indoor scenes (テクスチャが貧しい) に有効な特徴
を学習できた
○ photometric BA よりも凸性の高い特徴が有効だった
28
30. Qualitative Evaluation (on KITTI)
● unsupervised [Wang+,CVPR18], supervised
[Godard+,CVPR17] 両方を outperformed
30
[Wang+,CVPR18] Learning depth from monocular videos using direct methods.
[C. Godard+,CVPR17] Unsupervised monocular depth estimation with left-right consistency.
32. Ablation Studies
● BA-layer vs pose estimation
○ fixed depth map に対し pose estimation をした結果と比較
○ BA-layer (jointly optimize depth and camera pose) が優位
● to make the comparison fair:
○ どちらも learned-feature F を用いる
32
33. Ablation Studies
● Differentiable LM vs Damped gauss newton
○ λ=prefixed な damped gauss newton 法との比較
■ CodeSLAM[CVPR18] で利用
○ λが固定な方法に比べて,λを推論しつつ update する BA-Net の結果が大き
く上回る
● Again, for fair comparison,
○ 両方で learned-feature F を利用
33
34. Conclusion
● Contributions:
○ SfM に適した特徴 を 自動獲得する feature BA を提案
○ LM法を differentiable に変形した BA-layer を提案
○ learned-feature representation + depth parametrization + BA
optimization をend-to-end で行うことが可能になった
● Future work
○ multi-view extension
■ 本論文では two-view の検証のみ
■ 1 camera 1 network (intrinsic parameter に相当する特性を内包)
■ 原理上は easily extensible
34
35. Learning to solve NLLS [R.Clark+,ECCV18] との比較
● LS-Net: Learning to Solve Nonlinear Least Squares for Monocular Stereo
○ CodeSLAM [R.Clark+,CVPR18] グループの成果
○ gauss-newton の optimizer 自体を学習する(meta-learning)
● BA-Net: Dense Bundle Adjustment Network
○ LM法をNNで実装
35
Appendix
36. Meta-learning
● Learning to learn gradient descent by gradient descent [NIPS16]
○ https://github.com/deepmind/learning-to-learn
○ Optimizer を用いて(SGDとか)Optimizer 自体を学習する
36
Appendix
データに応じて,最適な g を学習できる!(はず)
なんだこの絵は...
37. Learning to solve NLLS [R.Clark+,ECCV18] との比較
● LS-Net: Learning to Solve Nonlinear Least Squares for Monocular Stereo
● BA-Net: Dense Bundle Adjustment Network
37
Appendix
Jacobian,残差を入力とする optimizer 自体をRNN-LSTM で学習
λのみNNで表現し,LM法は計算グラフとして実装
![about.me
@denkiwakame
● 〜2015 京都大学 松山研究室(B4〜M2)
● 〜2017 某企業研
● 2017〜 都内ベンチャー
Interests
● Generalized Camera Calibration [M.Nishimura+,ICCV15]
● MRF optimization (low-level vision)
● Model Compression
● GPGPU (CUDA),SIMD
● Quantum Computing
2
[M.Nishimura+, ICCV15] A Linear Generalized Camera Calibration from Three Intersecting
Reference Planes](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)