G空間EXPO 2017
•
3 gostaram•1,067 visualizações

G空間EXPO2017の産総研ブースのパネル一覧です。 http://www.g-expo.jp/

Recomendados
Mais conteúdo relacionado
Mais de Kurata Takeshi
Mais de Kurata Takeshi (20)
G空間EXPO 2017
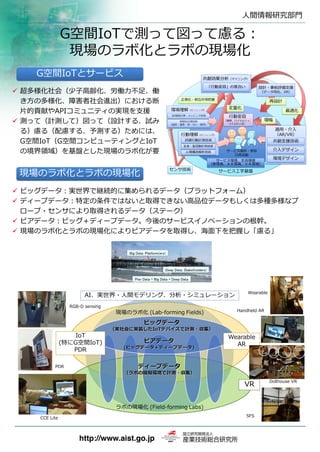
- 1. 人間情報研究部門 G空間IoTで測って図って慮る: 現場のラボ化とラボの現場化 G空間IoTとサービス 超多様化社会(少子高齢化、労働力不足、働 き方の多様化、障害者社会進出)における断 片的貢献やAPIコミュニティの実現を支援 測って(計測して)図って(設計する、試み る)慮る(配慮する、予測する)ためには、 G空間IoT(G空間コンピューティングとIoT の境界領域)を基盤とした現場のラボ化が要 SFS Dollhouse VR CCE Lite Wearable RGB-D sensing PDR Handheld AR 現場のラボ化とラボの現場化 ビッグデータ:実世界で継続的に集められるデータ(プラットフォーム) ディープデータ:特定の条件ではないと取得できない高品位データもしくは多種多様なプ ローブ・センサにより取得されるデータ(ステーク) ピアデータ:ビッグ+ディープデータ。今後のサービスイノベーションの根幹。 現場のラボ化とラボの現場化によりピアデータを取得し、海面下を把握し「慮る」 Big Data: Platform(ers) Deep Data: Stake(holders) Pier Data = Big Data + Deep Data
- 2. 人間情報研究部門 メニーセンサによる全身姿勢推定 メニーセンサによる測位と全身姿勢の同時推定 複数のPDRモジュールを計測対象者に装着 することで位置と全身姿勢の同時推定 全身姿勢推定結果の活用 関節負荷推定に基づく労働負荷モニタリング 歩行検知・相対移動量推定による測位の改良 全身姿勢の機械学習による行動認識 今後の方針 装着センサ数をどこまで減らせるかの検討 専用ウェアラブルセンサ開発 移動軌跡データ 各モージュールの 姿勢情報 骨格運動生成 (逆運動学) 関節トルク推定 (逆動力学) 小型PDRモジュール 機械学習に基づく挙動分類 機械学習手法:RandomForest 利用した特徴量: 体勢を示す特徴量(関節角のクオータニオン等) 位置を示す特徴量(全身姿勢・PDRにより推定される位置) 相対変化を示す特徴量(時間窓における位置・姿勢の変化量) 時系列動作データに対する動作認識結果の確認 PDR測位評価のリファレンスとして全身姿勢を活用 全身姿勢・絶対位置計測デバイスを活用したPDR測位評価 のためのリファレンス付きデータセット収録 簡単な作業・安価なコストで独自シナリオにおける正解値・ リファレンス付きデータセットの収録が可能 全身姿勢や端末姿勢により計測時の状況再現が可能 計測軌跡とリファレンスを視覚的に比較できる可視化ツール も準備 リファレンスデータと計測軌跡の可視化 計測軌跡・全身姿勢・デバイス姿勢状況を3次元CG空 間内に再現 デバイス姿勢と全身姿勢は別ウインドウでZoom-up 各種時系列データの同期再生 上:軌跡,左下:Tango,右 下:PN Tangoをリファンレンスとする定量比較例 位置 歩行距離 位置誤差 角度誤差
- 3. Start Goal 15cm 3D-LIDAR Velodyne VLP-16 6DoF IMU Xsens MTi-300 90[m] 人間情報研究部門/人工知能研究センター ~動きながら歩行者観測~|人・環境地図生成 3D地図作成 環境の3次元形状を点群地図として復元 手持ちセンサユニットから自動車まで、 多様な動きに対応可能 リアルタイム自己位置推定 3次元地図を基に、 6次元自己位置姿勢 (x, y, z, roll , pitch , yaw)を推定 ノートPCでリアルタイムに計算可能 移動しながら人流計測 複数の歩行者を同時に検出・追跡 いつどこを人が通ったか地図にプロット 通路として使われる領域を自動学習 3D地図作成とリアルタイム位置推定 歩行者観測と通行者情報地図作成 自律移動ロボットに よる人と環境の理解 z x y Roll Yaw Pitch 人と環境のセマンティックマップ 3次元形状地図 →自己位置推定 2次元形状地図 →車輪ロボットの 経路計画 歩行者軌跡 →どこが通路? 混む箇所は? 観測した 歩行軌跡 通行者 を識別 通路領域 を学習 ・約900m歩行,速度=1.4m/s ・始点/終点の位置誤差=88mm 人の流れを考慮 したロボットの 自律移動 20m 0m height 手持ちセンサユニット 四脚ロボットがれき移動 自動車の自律走行
- 4. 人工知能研究センター RGB-Dカメラとシミュレータを用いた 大規模空間における人流解析 RGB-D をカメラ用いた人の流れの計測技術 シミュレータを用いた人の流れの予測技術 イベントや大規模空間での一人ひとりの人の流れを計測 カラー画像(RGB)と距離画像(Depth)が取得できるカメラで人の流れを計測 カメラを環境に設置することで手軽に計測可能 イベントや大規模空間での網羅的な人の流れを予測 最大数十万人規模の人の流れを高速・高精度でコンピュータで予測再現 多数の試行結果から傾向を把握 RGB-Dカメラと処理PC 花火大会後の混雑の計測 大規模施設での避難訓練の計測 CrowdWalk 花火大会後の混雑の再現 大規模施設での混雑箇所の予測 群集流動シミュレータ これまでの解析事例 新国立劇場や北九州芸術芸場での避難誘導計画 関門海峡花火大会や国体会場付近での混雑緩和計画 北千住の広域浸水避難シミュレーション 大規模複合施設でのマーケティング 大学病院の救急救命室 / 英国大学での看護教育実習支援 産総研オープンラボ / G空間EXPO会場 等多数 0 50 100 150 200 250 2014 2012 0 50 100 150 200 250 300 350 400 22:20:00 22:30:00 22:40:00 22:50:00 23:00:00 23:10:00 23:20:00 23:30:00 23:40:00 properties_agent1404_01 properties_agent1404_02 properties_agent1404_03 properties_agent1404_04
- 5. ロボットイノベーション研究センター 高精度マーカによる測位 ~ カメラで位置を知る視覚ツール ~ 測位に使える超高精度マーカの開発 測位インフラとしての応用 姿勢推定誤差0.1°の平面型視覚マーカ(単眼カメラ画像から位置姿勢を推定するツール) 従来のARマーカの50倍以上の姿勢精度(誤差1/50以下) 奥行きの位置精度も向上(位置推定誤差は撮影距離の0.1%,従来マーカの1/10以下) カメラを持つさまざまな自律移動体(人間を含む)の測位が可能に GPSを代替・補完する測位インフラとして VMP (可変モアレパターン)は、 見る角度に応じて黒線の位置が連続 的に変化する特殊パターンです。 標準VMP 高感度VMP 標準VMP 高感度VMP レンチキュラーレンズ 縞模様 姿勢推定誤差 0.1° 高精度な姿勢情報を利用した 特殊アルゴリズムにより、 位置推定誤差 距離の0.1% 産総研開発の高精度マーカ(2012年) ※ + 高感度VMP ×2 = 超高精度マーカ カメラ 測位用超高精度マーカ 1.0cm 汎用高精度マーカ 4.5cm 4点マーカ 13.2cm 従来型ARマーカ 20cm以上 位置基準となる視覚マーカ 真値 推定値 1円硬貨 (φ20mm) 平面型視覚マーカを用いた測位とその精度 画像から推定できるのは「カメラ座標系でのマーカ の位置姿勢」。測位は、これを基に「マーカ座標系 でのカメラの位置姿勢」を計算することです。だか ら超高精度な姿勢精度が必要なのです。 さまざまな産業への波及効果 測位用超高精度マーカ(2016年) 自動搬送車 <物流・製造業等> 自動車 <一般> トラクター <農業> 移動ロボット <サービス産業等> ドローン <モニタリング等> 測位用高精度マーカ 人間・ ※ 参考動画: 「人と共栄する情報技術: 独自マーカによる高精度な位置姿勢計測」 https://www.youtube.com/watch?v=C_ZHV1ASR-0 開発者:田中 秀幸 国立研究開発法人 産業技術総合研究所 ロボットイノベーション研究センター 主任研究員 <hideyuki-tanaka@aist.go.jp>
- 6. 人工知能研究センター 世界中の各種衛星画像データを 閲覧・保存できます! Landsat-8は2013年2月11日に米国が打ち上げた地球 観測衛星で、15~30mの空間分解能があり、可視・近 赤外・短波長赤外・熱赤外の帯域のデータを取得して います。日本付近は2013年11月から、他の地域は最 新の雲なし画像が閲覧・ダウンロードできます。 ASTER は 1999 年 12 月 18 日 に 米 国 が 打 ち 上 げ た TERRA衛星に搭載された日本の地球観測センサで す。可視・近赤外(15m)、短波長赤外(30m)、熱赤外 (90m)の帯域・空間分解能のデータを取得していま す。2000年~現在の世界中の画像を閲覧・ダウンロー ドできます。 Sentinal-2Aは2015年6月23日にヨーロッパ宇宙機関 が打ち上げた地球観測衛星で、可視・近赤外・短波長 赤外の帯域を10~60mの空間分解能でデータを取得 しています。世界中の最新雲なし画像が閲覧・ダウン ロードできます。 Landsat-8・ASTER・Sentinel-2A グラフィックユーザインタフェース(LandBrowser) 産総研が公開するLandBrowserは、上に述べたLandsat-8、ASTER、Sentinel-2Aのデータと、2000~2003年の日本周辺 のLandsat-7のデータを閲覧・検索・ダウンロードするためのグラフィックユーザインタフェースです。観測位置の指定、ベ ースマップの変更、衛星の選択、ベースマップを見るための画像の透明化ができます。 衛星データは膨大であり、人間がすべてを調べることはできません。人工知能技術(機械学習)を使って、地物認識(メ ガソーラーやゴルフ場)、変化検知、高温検知などの研究を行っています。 ASTERデータは、世界中 から選ぶことができます。 全世界のLandsat-8データは最新の雲なし 画像をバンドごとまたはトゥルーカラー・シー ンごとに選ぶことができます。 日本付近のLandsat-7/8のデータは、表示範囲で データをダウンロードできます。 検索期間を設定できます。 雲の量を設定できます。 画像を時系列に見 ることができます。 全世界のSentinel-2Aデータは最新の雲 なし画像をバンドごとまたはトゥルーカラ ー・シーンごとに選ぶことができます。
- 7. 人間情報研究部門 ※ 本事業は、平成26-29年度JST RISTEXプロ ジェクト“多世代共創による視覚障害者移動支援 システムの開発”の一環として行われています。 “マッピングパーティ” 多世代視覚障害者&晴眼者による地図情報作成活動 多世代の視覚障害者が協働で相互に移動 支援を行う新しいタイプの移動支援社会シス テムの実現を目指す。 具体的には、視覚障害者が携帯する汎用携 帯型端末が、歩行時における移動アクセシビ リティ情報を自動で収集し、クラウドを介して 情報共有できるナビゲーションシステムを開 発す。 また、地域での実証を通じて、多世代の視覚 障害者の移動支援を核とした地域コミュニテ ィ・デザイン手法を確立し、法制化・標準化な どの社会制度化に取り組む。 移動支援とコミュニティ 開発・活動事例 研究開発の全体像 事例検索ポータル 視覚障害者移動支援:マッピングパーティ http://seam.pj.aist.go.jp/ristex-mavi/ 5/31と6/18に実施したブラインドマッピングパーティ 参加者:のべ46名(晴眼者40名、視覚障害者6名) 記述対象:大型店舗の入り口・集合店舗、交通信号、音響信号・青 信号延伸・ボタン位置、誘導ブロック・点字案内・触地図、路面状態 (傾斜・表面特性)、車止め(ボラード)、車道・歩道・白線、側溝(フ タあり・なし)、道路上の手がかり(街路樹・電柱・道路標識など) 学生の意識の変化:“今まで,見えない人の立場に立ったことがな かった。” 地図データフォーマットについて:OSM (OpenStreetMap)などの既 存フォーマットでは、歩車分離式交差点、誘導ブロックのデータ形 式など不十分な点あり。 マッピング方法の比較 バーチャルマッピングパーティ
- 8. 人間情報研究部門 AR巨人将棋:視覚障害者移動支援実証実験 AR巨人将棋 実証実験での取得データ 視覚障害者のナビ利用時の並行タスク状況を将棋で模して検証 ナビシステムから提示される音声情報の聞き取り 頭の中での俯瞰地図作成(マップ構築) 俯瞰地図中での自己の位置付け(自己定位) AR巨人将棋の概要: 巨大な将棋盤の上を歩き回ると立ち位置に応じて駒情報が音声 ・映像でAR提示.駒配置を覚えて詰将棋を回答 開催日時:2016年9月3日,4日 参加者:将棋愛好家の視覚障害者11名 タグリーダを取り付けたサンダル RFIDタグシート 予行演習の様子 取得データに基づく歩行状況分析 RFIDシートの検出ログにより,体験者の移 動履歴を客観的に分析 将棋盤,音声,触図による詰将棋タスクによ る補助実験とAR巨人将棋との関係性分析 アンケート調査との関係性分析 取得された移動軌跡例 複数の詰将棋タスク実験 質問項目 回答平均 回答不変標準 偏差 所要時間との 相関係数 Q1:ゲームイベントは楽しかったです か? 1.4 0.5163978 -0.4989827 Q2:歩きながら駒の配置を頭に入れる のは簡単でしたか? 3.7 2.110819 0.03727355 Q3:詰将棋の問題は簡単でしたか? 2.1 1.523884 0.2593905 Q4:将棋盤のマスを人工芝の感触で確 認することは簡単でしたか?(白杖ま たは足の感触で) 2.1 0.875595 0.6772039 Q5:将棋盤のマスに乗ってから、中央部 を探し当てるのは簡単でしたか? 2.8 1.398412 0.1836768 Q6:中央部を探し当てた時、振動および 音声による反応は良かったですか? 2.8 1.398412 -0.08440138 Q7:将棋盤のそれぞれのマスから、隣の マスに移動するのは簡単でしたか? 2.9 1.72884 0.5902608 Q8:読み上げ音声は聞きやすかったで すか? 4.5 1.715938 0.01906386 Q9:音声情報の内容は盤面を把握する ために十分でしたか? 2.5 1.840894 0.3272629 Q10:普段、詰将棋を解きますか? 3 0.942809 -0.2367397 将棋タスクとAR巨人将棋の経過 時間によりゲーム難易度は適正 巨人将棋以外の平均所要時間で求 まる将棋力にも影響.歩行能力を 分析するには差し引く必要あり 平均移動速度は歩行への不安と関 係し,所要時間と相関あり 2度踏み比率はメンタルマップの 確信度不足に影響し所要時間と相 関,ナビ時の案内の再確認に相当 各将棋タスクの所要時間 AR巨人将棋以外 の平均所要時間 (将棋力) 各要素,アンケート調査結果と AR巨人将棋所要時間の関係を相 関係数や重回帰で分析 平均移動速度 2度踏み比率 AR巨人将棋へのアンケート回答 検証のまとめ:視覚障害者が楽しんでナビ利用時と近い状況で課題を解く実験AR巨人将棋を実施し,マルチタス ク状況での歩行の振舞を評価する方法論を提案.AR巨人将棋のタスク所要時間に影響した移動速度,2度踏み (案内再確認)率等はナビの実利用時のも測定可能であり,ナビ時の不安等の状況把握につなげられる可能性あり ※ 本事業は、平成26-29年度JST RISTEXプロ ジェクト“多世代共創による視覚障害者移動支援 システムの開発”の一環として行われています。
- 9. 人間情報研究部門 Virtual Human-Sensing VR技術を活用したG空間内での人間行動計測 環境の三次元モデルに基づくVR空間を活用し、実環境と「本質的に同じ(=Virtual) 」計測を実現 厳密な実験条件での比較検証 • 店舗レイアウトの比較 • 現場改善のバーチャルな効果測定 など 多様かつ詳細なデータの収集 サービスプロセスモデル 現状のサービスの評価 プロセスの再設計による改善 認知・ 計画 認知 行動 行動(反応) VR環境等 認知・行動変 容モデル 認知・行動変 容モデル 観測・モデル化 観測・モデル化 サービス 提供者 サービス 受容者 Real vs. Virtual 脳波による興味度と主観評価の比較実験 AIST-Service Field Simulator 様々なHMD 歩行シミュレータ 電動車椅子 シミュレータ モビリティロボット シミュレータ RGB-Dセンサを用いた 全身運動計測 視線計測装置を用いた観察対象の計測 脳波計測装置を用いた観察対象への興味度計測 多くの行動は実環境とバーチャル環境で類似 全ての行動が再現できるわけではない:限界を知った上で活用することも大切 主観評価と脳波による推定興味度に相関傾向 [応用] 位置情報に関連づけられた人間の行動 や反応(=VirtualなG空間情報)の計測・分析 マーケティング用途 顧客行動の計測に基づく購買環境の設計 労働環境改善 従業員行動の計測に基づく作業現場の設計 [研究課題] バーチャル環境における行動の 再現性の確保と評価 身体性・方向感覚の維持 見回し遅延対策
- 10. 人間情報研究部門 マルチエージェントによる 物流倉庫シミュレーション 物流倉庫ピッキング問題 マルチエージェントシミュレーション(MAS) 物流倉庫内ではピッキング作業効率化,労働格差,人員配置等の問題が存在 棚内部の配置から倉庫内全体の動きまで様々な研究が展開 (株)フレームワークス主催による物流データを使用したコンテストなど,コンテストも 多方面で展開されている (http://contest.frameworxopendata.jp/) 複数のエージェントを相互作用させることで現れる社会的な振る舞いを分析するシステム エージェント毎に個性パラメータを設定可能 様々な個性を持ったエージェントが個々(ミクロ)に 動くことで,環境(マクロ)に影響を与え,マクロの 変化によりミクロの動きが変化し,社会的に見られる ミクロ・マクロ・ループを再現 倉庫内では,移動速度やピッキングなどの作業速度を 個性パラメータとして設定しシミュレーションを実行 MASを利用した物流倉庫シミュレーション 従業員をMASにより再現し,熟練度別の作業分担,グループピッキング等の事前再現が可能 障害者の作業従事シミュレーションなどを展開し,障害者の雇用問題などにも対応 倉庫内シミュレーションの様子 (株)フレームワークス主催による 物流データ活用コンテスト MASに見られるミクロ・マクロ・ループ 3Dによる棚の再現 物流倉庫での雇用による,障害者雇用変化の予想障害者の作業を前提とした,エリア別ピッキングシミュレーション
- 11. 人間情報研究部門 PDR & VDR:活用事例と標準化 杉原エス・イー・アイ(株) • 屋内位置情報/フィールド業務支援ソリューション iField Indoor事業を展開 サイトセンシング(株) 活用事例 (株)メガチップス • 省電力PDR指向モーションコプロセッサー Frizzの製品化 (株)NTTドコモ/ (株)ゼンリンデータコム • 「ドコモ地図ナビ powered by いつもNAVI」 にPDR採用 • 全国の地下街や地下鉄駅構内に対応 • 320箇所(2015.4)から540箇所(2017.8) へエリア拡大 • PDR/VDR組込モジュールの 開発・製造・販売 • 産総研技術移転ベンチャー • 省電力型歩行者自律航法システム (PDR+)事業を展開 PDRベンチマーク標準化委員会 賛同組織(国内38組織:2017.9.17現在) 旭化成、アジア航測(南)、インテック、MTI、KDDI研究所、国際航業、澁谷工業、クウジット、GOV、サイトセンシング、 シャープ、杉原SEI、ゼンリンデータコム、電通国際情報サービス、トーヨーカネツ、日本IBM、日立、フレームワークス(渡辺)、 マルティスープ、ミルディア、村田製作所、メガチップス、リクルート(牛田)、リコー、レイ・フロンティア、 愛知工業大学(梶)、神奈川工大(田中)、慶大(春山、神武、中島)、九大(島田、内山)、筑波大(善甫、蔵田)、 東工大(岡田)、名大(河口)、奈良先端科学技術大(新井)、新潟大(牧野)、立命館大(西尾、村尾)、 産総研(蔵田、興梠、大隈、大西)、HASC、Lisra (敬称略、順不同) PDRの研究開発や実用化を進めている企業や大学が国内外で急増 GPSやWi-Fi測位のような絶対測位とは異なる評価方法が必要 仕様書や論文への性能表記の統一が必要 PDRベンチマーク標準化委員会 PDR Benchmark Standardization Committee 計測対象に特化した自律航法 自律航法とは? • 基準点からの相対移動計測技術 • DR = Dead Reckoning(和訳:推測航法・自律航法) • Dead = Deduced:推測に基づく~, Reckoning = Navigation:航法 PDR (Pedestrian Dead Reckoning) • 人に特化した自律航法 • 10軸センサー(加速度、角速度、磁気、気圧)を基に歩行動作、移動速度ベク トル、姿勢、相対高度変化量を推定(インフラがない場所でも測位可能 ⇒ 屋内 測位パラドックスの緩和) • 点の集合ではなく、線(形、曲率)としての意味を持つ軌跡を取得可能 VDR (Vehicle/Vibration-based Dead Reckoning) • 車両に特化した自律航法 • 計測実績:普通乗用車(GPS測位の補完目的)5車種、フォークリフト(動線・稼働状況解析目的) 50車種以上、鉄道(都心地下鉄、モノレール含む)6路線(路線距離:200km以上)、台車 15種類、 ショッピングカート(小売店内での動線追跡)4種類、ラジコンカー(玩具)3種類 蔵田武志・興梠正克・大隈隆史 (人間情報研究部門) 平成28年度理事長賞「研究」 「歩行者自律航法技術の研究」 マルティスープ(株) https://www.facebook.com/pdr.bms
- 12. PDR Challenge in Warehouse Picking PDR Challenge in Warehouse Picking PDR Benchmark Standardization Committee 精度指標 - 統合誤差指標 (Ed) - PDRの誤差蓄積指標(Es) 軌跡の自然さ指標 - 人間らしい移動速度指標(Ev) - 周波数指標(Ef) 倉庫シナリオ独自指標 - 障害物衝突(Eo) - ピッキング時動作指標(Ep) 日本2チーム,韓国,中国,台湾各1チーム 計5チーム参加 総合評価(C.E.)により表彰者を決定 優勝:KDDI総研,準優勝:名古屋大 障害物衝突評価Eoの影響が高かった 個別評価要素でみると勝者は異なる IPIN2017 CompetitionTrack4として, 物流倉庫内ピッキング作業者のPDR測位 精度を競うOff-siteコンペを開催 PDR ベンチマーク標準化委員会が主催,委員会賛同企業の 杉原SEI,Frameworx,マルティスープがスポンサー協力 倉庫内で実計測されたスマホセンサデータ,WMSピッキン グデータと倉庫内情報(フロア図,棚,障害物)を活用し て推定した軌跡を提出 評価指標 WMS: warehouse management system コンペの結果 Team 1 (ETRI) A Multi-Sensor Fusion Technique for Pedestrian Localization in a Warehouse Youngjae Lee, Haemin Lee, Jinhong Kim, Dongyeop, Kang, Kiyoung Moon (ETRI, Korea), Seong Yun Cho (Kyeongil University, Korea) Team 2 (KDDI) No PDR, No future Yoshihiro Ito, Hisashi Hoshi (KDDI Research, Inc., Japan) Team 3 (XMU) A Smartphone Based Indoor Positioning System Lingxiang Zheng, Yizhen Wang, Ao Peng, Zhenyang Wu, Dihong Wu, Biyu Tang, Hai Lu, Haibin Shi (Xiamen University, China), Huiru Zheng (University of Ulster, Ireland) Team 4 (Nagoya) Trajectory Estimation Using PDR and Simulation of Human-Like Movement Kotaro Hananouchi, Junto Nozaki, Kenta Urano, Kei Hiroi, Nobuo Kawaguchi (Nagoya University, Japan) Team 5 (YZU) Moving Trajectory Estimation Based on Sensors Ho-Ti Cheng, Wen-Chen Lu, Chia-Min Lin, Yu-Shen Lai, Yun-Yeh, Huan-Wei Liu, Shih- Hau Fang (Yuan Ze University, Taiwan) Ying-Ren Chien (National Ilan University, Taiwan), Yu Tsao (Academia Sinica, Taiwan) コンペ参加者リスト コンペの各評価指標と総合評価の結果 参加者提出軌跡例 参考:産総研推定軌跡例障害物衝突判定結果Eo例 誤差蓄積度合Es計算例 各指標を統合する 統合指標(C.E.) IPIN 2017 Competitions 屋内測位の国際会議 IPIN (Int. Conf. on Indoor Positioning & Indoor Navigation) が札幌で開催(9/18-21) 例年,IPINでは論文発表や招待講演等に加えて測位技術を競うコンペティション( On-site/Off-site )も開催 本年度は,計4トラックにおいて20チームがコンペティションに参加(中国5,韓国4,日本3,台湾2,ドイ ツ2,フランス1,ポルトガル1,チリ1,オーストラリア1) Team Ed Es Ep Ev Eo Ef Error Median [m] Error Slope [m/sec.] C.E. ETRI 65.406 96.344 97.195 99.998 51.821 11.323 11.032 0.121 65.741 KDDI 72.353 97.969 43.545 100 99.876 100 9.018 0.089 91.163 Nagoya 70.569 99.200 72.719 87.835 93.549 99.271 9.535 0.062 88.921 XMU 67.637 96.060 84.965 95.657 59.623 99.239 10.385 0.125 78.437 YZU 75.341 97.736 97.484 99.093 45.530 100 8.151 0.094 77.947