Introduction to Adaptive filters
•Transferir como PPTX, PDF•
5 gostaram•1,009 visualizações

An introductory seminar to adaptive filters.

Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (20)
Semelhante a Introduction to Adaptive filters
Semelhante a Introduction to Adaptive filters (20)
Mais de Firas Mohammed Ali Al-Raie
Mais de Firas Mohammed Ali Al-Raie (6)
Último
Último (20)
Introduction to Adaptive filters
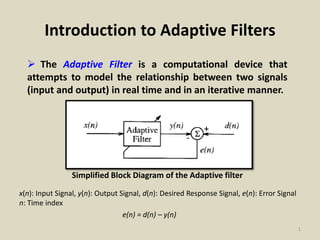
- 1. Introduction to Adaptive Filters The Adaptive Filter is a computational device that attempts to model the relationship between two signals (input and output) in real time and in an iterative manner. Simplified Block Diagram of the Adaptive filter x(n): Input Signal, y(n): Output Signal, d(n): Desired Response Signal, e(n): Error Signal n: Time index e(n) = d(n) – y(n) 1
- 2. The task of the filter is to adapt or change its coefficients iteratively from time n to time n+1 using an optimization procedure in order to minimize the error signal between the actual response and the desired response. This optimization procedure is usually known as the adaptive algorithm. Basic Elements of the Adaptive Filter 1. The signals being processed by the filters. 2. The structure of the filter. 3. The filter coefficients. 4. The adaptive algorithm of the filter. 5. The performance error function. 2
- 3. Adaptive Filter Realizations A program running on a DSP chip A set of logic operations implemented in an FPGA chip Adaptive Filter Structures 1- FIR Filter Structure (Transversal Filter Model) 2- IIR Filter Structure (Recursive Filter Model) 3- Adaptive linear Combiner 3
- 4. 4 The FIR Adaptive Filter Model N: Filter length = Number of filter coefficients Advantages: 1- Stability 2- Ease of implementation wk(n): Filter tap weights (or coefficients) at time instant n 1 0 )()()( N k k nkxnwny
- 5. 5 The IIR Adaptive Filter Model 1 1 1 0 )()()()()( M k k N k k knynbknxnany ak(n): Forward tap weights with a total number of N, bk(n): Feedback tap weights with a total number of M This filter structure is rarely used in practice due to its complexity, instability, and convergence problems.
- 6. 6 Adaptive Linear Combiner 1 0 )()()( N k kk nxnwny N: Number of input signals This filter model has multiple input signals and is used in some applications such as beam-forming or adaptive antenna arrays. Note: This filter can be viewed as a special case of the FIR filter if xk(n) = x(n-k).
- 7. 7 Important Features of Adaptive Filters Classification of Adaptive Algorithms
- 8. 8 Mathematical Model of a Generalized FIR Adaptive Filter T N nwnwnwnw )](.........)()([)( 121 )(nw : Filter coefficient vector at instant n T Nnxnxnxnx )]1(.........)1()([)( )(nx : Input signal vector )(.)()( nxnwny T
- 9. 9 )()()( nyndne The general form of the adaptive algorithm can be written as: ))(),((.)()1( nenxfnwnw Or )()()1( nwnwnw µ : step size The performance error function, also called the cost function, is represented by J and can take several forms. The most popular form is the mean squared error (MSE) function. )]([ 2 neEJMSE
- 10. 10 Numerical Example Suppose it is required to calculate the coefficients of a two-tap FIR adaptive filter in the next instant of time knowing that the initial values of coefficients are 0.1 and 0.2, the input signal samples are 1 and 0.5, and assume the desired output is 1. Use the following algorithm: )().(.)()1( nenxnwnw Take the step-size of the algorithm as 0.25.
- 11. 11 T nx ]5.01[)( T nw ]2.01.0[)( )(.)()( nxnwny T 2.0 5.0 0.1 .2.01.0 8.02.01)()()( nyndne )().(.)()1( nenxnwnw 3.0 3.0 1.0 2.0 2.0 1.0 5.0 1 8.025.0 2.0 1.0 So, the updated weights of the filter are w0=0.3 and w1=0.3.
- 12. 12 Applications of Adaptive Filters 1- System Identification An example of system identification is the modeling of channels in communication systems (channel estimation). The input signal x(n) in this case is a training sequence.
- 13. 13 2- Inverse System Modeling In this case, the filter attempts to model the inverse characteristics of the unknown system. Typical example is channel equalizers.
- 14. 14 3- Signal Prediction In this case the input signal x(n) is to be predicted from its samples x(n-n0), x(n-n0-1), ……..
- 15. 15 4- Interference Cancellation In this application, desired signal d(n) is the corrupted signal with the interference. The adaptive filter tries to synthesize a replica of the interference signal that is combined with the desired signal. The output signal of the filter is subtracted from the corrupted signal to produce a clean signal e(n).
- 16. 16 Outline of the Material 1- Random Variables and Stochastic Processes 2- Wiener Filtering and the difference between Optimum Linear Filters and Adaptive Filters 3- The Steepest-descent Algorithm 4- The Least-Mean Square (LMS) Algorithm 5- The Recursive Least–Squares (RLS) Algorithm 6- The Kalman Algorithm References 1- B. Farhang-Boroujeny, Adaptive Filters: Theory and Applications, John Wiley & Sons, 1998. 2- Alexander Poularikas and Zayed Ramadan, Adaptive Filtering Primer with MATLAB, Taylor & Francis, 2006.