
Recomendados
Mais conteúdo relacionado
Mais de Alane1967
Fig p3 13
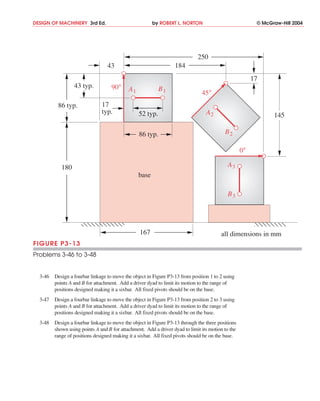
- 1. DESIGN OF MACHINERY 3rd Ed. by ROBERT L. NORTON © McGraw-Hill 2004 250 43 184 17 43 typ. 90° A1 B1 45° 86 typ. 17 typ. 52 typ. A2 145 86 typ. B2 0° 180 A3 base B3 167 all dimensions in mm FIGURE P3-13 Problems 3-46 to 3-48 3-46 Design a fourbar linkage to move the object in Figure P3-13 from position 1 to 2 using points A and B for attachment. Add a driver dyad to limit its motion to the range of positions designed making it a sixbar. All fixed pivots should be on the base. 3-47 Design a fourbar linkage to move the object in Figure P3-13 from position 2 to 3 using points A and B for attachment. Add a driver dyad to limit its motion to the range of positions designed making it a sixbar. All fixed pivots should be on the base. 3-48 Design a fourbar linkage to move the object in Figure P3-13 through the three positions shown using points A and B for attachment. Add a driver dyad to limit its motion to the range of positions designed making it a sixbar. All fixed pivots should be on the base.