2. Introduction
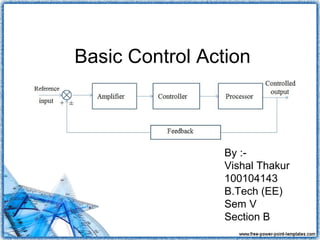
• A controller compares the actual value of
output with the reference input,
determines the deviation, and produces a
control signal that will reduce the deviation
to zero or to a small value.
• The manner in which the controller
produces the control signal is called the
control action.
6. • Actuating signal is proportional to error
signal
• Such a system always has a steady-state
error in the step response. Such a steady-
state error is called an offset.
7. Change in gain in P controller
• Increase in gain:
→ Upgrade both
steady-state and
transient responses
→Increases oscillations
→ Reduce steady-state
error
→ Reduce stability!
9. Integral Controller
• Integral of error with a constant gain
→ increase the system type by 1
→eliminate steady-state error for
a unit step input
→ amplify overshoot and oscillations
10. Proportional-Plus-Integral
Control
• To eliminate offset, the proportional controller may be replaced
by a proportional-plus-integral controller.
• If integral control action is added to the controller, then, as long
as there is an error signal, a signal is developed by the controller
to reduce this error, provided the control system is a stable one.
11. Change in gain for PI
controller
• Increase in gain:
→ Do not upgrade
steady-state responses
→ Increase slightly
settling time
→ Reduces stability and
bandwidth of system
→ Increase
oscillations and
overshoot!
12. Derivative Controller
• Differentiation of error with a constant
gain
→ detect rapid change in output
→ reduce overshoot and oscillation
→ do not affect the steady-state response
13. Proportional-Plus-Derivative
Control
With derivative action, the controller output is proportional to
the rate of change of the measurement or error.
14. Effect of change for gain PD
controller
• Increase in gain:
→ Upgrade transient
response
→ Decrease the peak
and rise time
→ Improves stability and
bandwidth of system
→ Increase overshoot
and settling time!
15. Proportional-Plus-Derivative
-Plus-Integral Control
• A proportional–integral–derivative controller (PID
controller) is a control loop feedback
mechanism widely used in industrial control
systems – a PID is the most commonly used
feedback controller.
• A PID controller calculates an "error" value as
the difference between a measured process
variable and a desired setpoint. The controller
attempts to minimize the error by adjusting the
process control inputs.
16. • The PID controller calculation involves three
separate constant parameters, and is accordingly
sometimes called three-term control:
the proportional, the integral and derivative values,
denoted P, I, and D.
• These values can be interpreted in terms of
time: P depends on the present error, I on the
accumulation of past errors, and D is a prediction
of future errors, based on current rate of change.