
Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (20)
Destaque
Destaque (15)
Semelhante a Trabajo sobre mecanismos
Semelhante a Trabajo sobre mecanismos (20)
Último
Último (20)
Trabajo sobre mecanismos
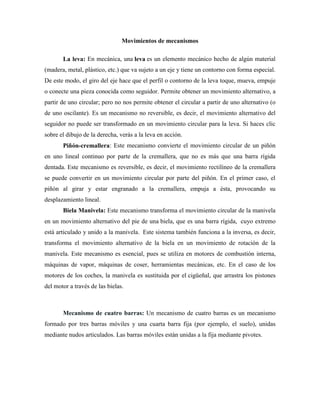
- 1. Movimientos de mecanismos La leva: En mecánica, una leva es un elemento mecánico hecho de algún material (madera, metal, plástico, etc.) que va sujeto a un eje y tiene un contorno con forma especial. De este modo, el giro del eje hace que el perfil o contorno de la leva toque, mueva, empuje o conecte una pieza conocida como seguidor. Permite obtener un movimiento alternativo, a partir de uno circular; pero no nos permite obtener el circular a partir de uno alternativo (o de uno oscilante). Es un mecanismo no reversible, es decir, el movimiento alternativo del seguidor no puede ser transformado en un movimiento circular para la leva. Si haces clic sobre el dibujo de la derecha, verás a la leva en acción. Piñón-cremallera: Este mecanismo convierte el movimiento circular de un piñón en uno lineal continuo por parte de la cremallera, que no es más que una barra rígida dentada. Este mecanismo es reversible, es decir, el movimiento rectilíneo de la cremallera se puede convertir en un movimiento circular por parte del piñón. En el primer caso, el piñón al girar y estar engranado a la cremallera, empuja a ésta, provocando su desplazamiento lineal. Biela Manivela: Este mecanismo transforma el movimiento circular de la manivela en un movimiento alternativo del pie de una biela, que es una barra rígida, cuyo extremo está articulado y unido a la manivela. Este sistema también funciona a la inversa, es decir, transforma el movimiento alternativo de la biela en un movimiento de rotación de la manivela. Este mecanismo es esencial, pues se utiliza en motores de combustión interna, máquinas de vapor, máquinas de coser, herramientas mecánicas, etc. En el caso de los motores de los coches, la manivela es sustituida por el cigüeñal, que arrastra los pistones del motor a través de las bielas. Mecanismo de cuatro barras: Un mecanismo de cuatro barras es un mecanismo formado por tres barras móviles y una cuarta barra fija (por ejemplo, el suelo), unidas mediante nudos articulados. Las barras móviles están unidas a la fija mediante pivotes.
- 2. Mecanismo de Contra manivela: Es también un mecanismo de cuatro barras, llamada también mecanismo manivela - biela - manivela, y consiste en dos manivelas con rotación continua; las dos manivelas dan una vuelta completa. Mecanismo de Yugo Escocés: Yugo escocés, también deletreado Yugo escocés y yugo escocés, es un mecanismo para convertir el movimiento linear de un resbalador en el movimiento rotatorio o viceversa. Pistón o la otra parte de intercambio se junta directamente a resbalar yugo con una ranura que contrata un perno en la partición que rota. La forma del movimiento del pistón es una pura seno en un cierto plazo la onda dado una constante velocidad rotatoria. Mecanismo de WATT: James Watt (1736-1819) inventó este mecanismo en 1769. Es un mecanismo de línea recta aproximada, pero suficiente para los requisitos de la época en los que no existían herramientas capaces de producir rectitud con precisión. El mecanismo cuenta con dos balancines articulados a la barra fija de igual longitud (O2-A es igual a O4-B). El punto trazador está en el centro del acoplador (barra AB). Mecanismo de ROBERT: El siguiente mecanismo es atribuido a Roberts (1789-1864). Consiste en dos balancines de igual longitud (O2-A es igual a O4-B) L articulados a la barra fija y un acoplador con un punto trazador que dista de las articulaciones la misma distancia (AP = BP = L) formando el acoplador un triángulo isósceles. Este mecanismo consigue un tramo rectilíneo aproximado entre las articulaciones a la barra fija (es decir, entre O2 y O4) Velocidad y Aceleración Lineal en movimiento El movimiento ha constituido uno de los temas de estudio clásico de la física. Su análisis corresponde a la rama de las ciencias llamada cinemática, que se ocupa de la descripción intrínseca y detallada de los movimientos, y no de las causas que los provocan. Dos magnitudes elementales de la física son el espacio y el tiempo. Íntimamente relacionados, el tiempo (t) permite ordenar los sucesos físicos en una escala que distingue entre pasado, presente y futuro, mientras que el espacio (s) puede verse como un medio abstracto en el que se desplazan los cuerpos. Se describe normalmente mediante tres coordenadas que corresponden a la altura, la anchura y la profundidad.
- 3. El espacio recorrido por unidad de tiempo se denomina velocidad del movimiento. Cuando el desplazamiento tiene lugar en una línea recta, la velocidad se denoma lineal. La velocidad lineal media de un punto móvil es igual al cociente entre el espacio medio recorrido entre las posiciones 1 y 2 y el tiempo transcurrido. La velocidad que posee un cuerpo en un momento dado, se llama instantánea y se expresa como: La velocidad lineal se mide en metros por segundo (m/s) en el Sistema Internacional. La variación de la velocidad con respecto al tiempo se denomina aceleración. Así, la aceleración lineal instantánea de un cuerpo se indica matemáticamente como: En el Sistema Internacional, la aceleración lineal se mide en metros por segundo al cuadrado (m/s2 ). Vector de posición de un punto: (t)
- 4. Velocidad y aceleración angular del movimiento Cuando un movimiento tiene lugar en una trayectoria curva, se define la velocidad angular instantánea (símbolo w) como el ángulo que barre el radio vector por unidad de tiempo. El radio vector es el que indica la posición del punto desde el centro de la circunferencia que marca la trayectoria. En el Sistema Internacional, el ángulo se mide en radianes, y la velocidad angular se expresa en radianes por segundo. Análogamente, la aceleración angular instantánea (símbolo a) es la variación de la velocidad angular instantánea por unidad de tiempo, y se mide en radianes por segundo al cuadrado. En un movimiento circular descrito según una circunferencia de radio R, la relación entre la velocidad y aceleración lineal (a lo largo de la curva de la circunferencia) y angulares (según los ángulos descritos) instantáneas es la siguiente: Movimiento circular. En cinemática, el movimiento circular (también llamado movimiento circunferencial) es el que se basa en un eje de giro y radio constante, por lo cual la trayectoria es una circunferencia. Si además, la velocidad de giro es constante (giro ondulatorio), se produce el movimiento circular uniforme, que es un caso particular de movimiento circular, con radio y centro fijos y velocidad angular constante. En el movimiento circular hay que tener en cuenta algunos conceptos que serían básicos para la descripción cinemática y dinámica del mismo: Eje de giro: es la línea recta alrededor de la cual se realiza la rotación, este eje puede permanecer fijo o variar con el tiempo pero para cada instante concreto es el eje de la
- 5. rotación (considerando en este caso una variación infinitesimal o diferencial de tiempo). El eje de giro define un punto llamado centro de giro de la trayectoria descrita (O). Arco: partiendo de un centro fijo o eje de giro fijo, es el espacio recorrido en la trayectoria circular o arco de radio unitario con el que se mide el desplazamiento angular. Su unidad es el radián (espacio recorrido dividido entre el radio de la trayectoria seguida, división de longitud entre longitud, adimensional por tanto). Velocidad angular: es la variación del desplazamiento angular por unidad de tiempo (omega minúscula, ). Aceleración angular: es la variación de la velocidad angular por unidad de tiempo (alfa minúscula, ). En dinámica de los movimientos curvilíneos, circulares y/o giratorios se tienen en cuenta además las siguientes magnitudes: Momento angular (L): es la magnitud que en el movimiento rectilíneo equivale al momento lineal o cantidad de movimiento pero aplicada al movimiento curvilíneo, circular y/o giratorio (producto vectorial de la cantidad de movimiento por el vector posición, desde el centro de giro al punto donde se encuentra la masa puntual). Momento de inercia (I): es una cualidad de los cuerpos que depende de su forma y de la distribución de su masa y que resulta de multiplicar una porción concreta de la masa por la distancia que la separa al eje de giro. Momento de fuerza (M): o par motor es la fuerza aplicada por la distancia al eje de giro (es el equivalente a la fuerza agente del movimiento que cambia el estado de un movimiento rectilíneo). Movimiento relativo Un movimiento es relativo cuando un objeto se mueve, tiene movimiento si cambia de posición a través del tiempo. El movimiento es relativo porque depende del punto de referencia desde donde se mide. Un ejemplo: Es la persona y el tren. Si la persona está en el andén y se utiliza a si mismo como punto de referencia. El tren se mueve. Si la persona está
- 6. en el tren y se utiliza a si mismo como punto de referencia. El andén se mueve. No existe ningún punto de referencia absoluto, por lo tanto todo movimiento es relativo. Método de componentes ortogonales: composición y descomposición Composición y Descomposición: La descomposición de vectores en sus componentes ortogonales o rectangulares. Un vector se puede descomponer trazando líneas perpendiculares a los ejes, la línea perpendicular al eje “x” será la componente vertical del vector Ax y la línea perpendicular al eje “y” es la componente horizontal del vector. Ay Las componentes también son vectores por lo que tienen magnitud, dirección y sentido. Es un método utilizado para calcular la velocidad de un punto a partir de su velocidad relativa a otro punto de velocidad conocida. Es muy común utilizarlo en cursos de ingeniería mecánica para obtener la velocidad de una barra, pistón u otros elementos de un mecanismo. Método de la Velocidad Relativa Método de la Velocidad Relativa Análisis de Velocidad en el Movimiento Coplanario Método de componentes ortogonales: composición y descomposición El centro instantáneo se puede definir de cualquiera de las siguientes maneras: A) Cuando dos cuerpos tienen movimiento relativo coplanario,el centro instantáneo es un punto en un cuerpo sobre el cual otro gira en el instante considerado. B) Cuando dos cuerpos tiene movimiento relativo coplanario, el cetro instantáneo es el punto en el que los cuerpos están relativamente inmóviles en el instante considerado . Método de centro instantáneo: Número de centro Determinación de centros por teorema de Kennedy
- 7. Los centros instantáneos de un mecanismo se pueden localizar por el sistema del teorema de Kennedy. Este teorema establece que los centros instantáneos para cualesquiera tres cuerpos con movimientos coplanarios coincidan a lo largo de una misma línea recta. Se puede demostrar este teorema como contradicción, como sigue: En cualquier mecanismo que tenga movimiento coplanario, existe un centro instantáneo para cada par de eslabones. El número de centros instantáneos es, por lo anterior, igual al número de pares de eslabones. Cuando se tienen n eslabones, el número de centros instantáneos es igual al número de combinaciones de n objetos tomados a un tiempo, a saber n(n-1)/2 Número de Centros Instantáneos Es importante que el estudiante aprenda a reconocer el mecanismo de corredera- biela y manivela en cualquiera de las múltiples formas, ya que su aplicación para usos prácticos es amplia y variada. Se podría describir como una cadena cinemática de cuatro eslabones, en la cual un par de eslabones tiene movimiento rectilíneo con respecto a cada uno de los otros, mientras que el movimiento relativo de cualquier otro par de eslabones adjuntos es el par cerrado. Por consiguiente, el mecanismo tiene tres pares cerrados y un par en deslizamiento. Centros instantáneos para el mecanismo de corredera biela y manivela Cuando un mecanismo tiene seis eslabones, son quince el número de centros instantáneos a localizar. Entonces es aconsejable tener un método sistemático para tabular el progreso y para que ayude en la determinación. Esto se puede complementar por medio de un diagrama circular o por el uso de tablas. Se dan los dos métodos y se ilustran con un ejemplo. Tabulación de centros instantáneos a) Diagrama circular. Un diagrama de la forma mostrada en la figura 4.3b, nos es útil para encontrar centros instantáneos, puesto que nos da una visualización del orden en que los centros se pueden localizar por el método del teorema de Kennedy y también, en
- 8. cualquier estado del procedimiento, muestra que centros faltan por encontrarse. El diagrama circular será útil para encontrar los centros en el mecanismo de seis eslabones. b) Método tabular. El método alternativo para localizar centros instantáneos de uso común es el método tabular. En este procedimiento se establece una tabulación general y se amplía con tabulaciones suplementarias. En las columnas principales de la tabulación general se enumeran los números de los eslabones en el mecanismo. En la primera columna se apunta el número de la parte superior dela columna, combinando con aquellos números a la derecha del mismo. En la segunda columna se apunta el numero de la parte superior de la columna, combinando con aquellos números a la derecha del mismo. Continuando este procedimiento hasta el final delas tablas, nos da la lista completa de todos los centros que han de encontrarse. Para calcular la velocidad de un punto A que se mueve con respecto a un punto B, que a su vez se mueve respecto a un referencial dado, podemos usar la siguiente relación: vA=vB+vAB donde: vA, velocidad del punto A respecto a un referencial dado. vB, velocidad del punto B respecto al mismo referencial. vAB, velocidad relativa del punto A respecto al punto B. Quedando la fórmula de la siguiente manera: vAB=vA−vB Entonces, para resolver el movimiento relativo entre A y B lo que se hace es expresar la velocidad de A y de B respecto un mismo sistema de referencia o referencial. La velocidad relativa no tiene por qué estar asociada movimientos rectilíneos, ya que la trayectoria de las partículas puede ser curvilínea en general. Dado el carácter vectorial de la velocidad, es habitual expresar todas las velocidades, tanto la relativa como la de los puntos A y B, mediante sus componentes vectoriales (dos en el movimiento plano y tres en el espacial).
- 9. “La cinemática como principal termino para todo movimiento” La cinemática y la dinámica de la maquinaria con respecto a la síntesis de los mecanismos toman un papel importante ya que gracias a ella se puede lograr los movimientos o tareas requeridas por un mecanismo o función particular. El objetivo fundamental de la cinemática es crear diseñar los movimientos deseados de las partes mecánicas y luego calcular matemáticamente las posiciones, velocidades y aceleraciones que los movimientos crearan en las partes. Como la mayoría de los sistemas mecánicos ligados a la tierra la masa en esencia permanece constante con el tiempo. Los esfuerzos forman también un papel fundamental ya que serán una función tanto de las fuerzas aplicadas como inerciales (m.a). Un mecanismo es un sistema de elementos acomodados para transmitir movimientos de una forma predeterminada lo cual si se recargan en exceso y funcionan a bajas velocidades en ocasiones se pueden tratar de manera estricta como dispositivos cinemáticos. Uno de los conceptos fundamentales de la cinemática son los grados de libertad (GDL) el cual se considera como el número de parámetros independientes que se necesitan para definir unívocamente su posición en el espacio en cualquier instante. En el plano se requiere de tres parámetros (GDL): dos coordenadas lineales (x,y) y una coordenada angular (q ). En el espacio se requiere de seis GDL: tres distancias (x,y,z) y tres ángulos (q ,f ,r ). Y a su vez un cuerpo rígido considerado como aquel que no experimenta ninguna deformación. Entre los Tipos De Movimientos se encuentran la Rotación pura la cual es considerada cuando cuerpo posee un punto (centro de rotación) que no tiene movimiento con respecto al marco de referencia estacionario. Todos los demás puntos del cuerpo describen arcos respecto a ese centro. Una línea de referencia marcada en el cuerpo a través de su centro cambia únicamente en orientación angular. Por otra parte tenemos la Traslación pura en la cual todos los puntos en el cuerpo describen trayectorias paralelas (curvas o rectas). Una línea de referencia trazada en el cuerpo cambia su posición lineal
- 10. pero no su orientación o posición angular. Otro Movimiento es el considerado complejo el cual es una combinación simultánea de rotación y traslación.