
Recomendados
Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (20)
Semelhante a Chapter10
Semelhante a Chapter10 (20)
Mais de Kiya Alemayehu
Último
Último (20)
Chapter10
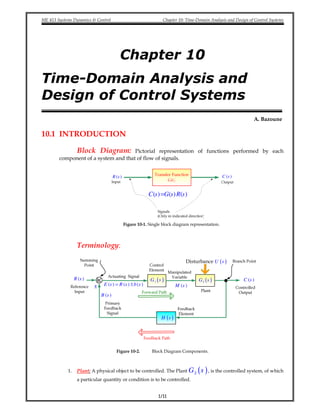
- 1. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 1/11 Chapter 10 Time-Domain Analysis and Design of Control Systems A. Bazoune 10.1 INTRODUCTION Block Diagram: Pictorial representation of functions performed by each component of a system and that of flow of signals. ( )C s( )R s ( ) ( ) ( )=C s G s R s Figure 10-1. Single block diagram representation. Terminology: ( )C s( )R s ( )G s1 ( )G s2 ( )H s ( )Disturbance U s ± ( ) ( ) ( )E s R s b s= ± ( )M s ( )B s Figure 10-2. Block Diagram Components. 1. Plant: A physical object to be controlled. The Plant ( )G s2 , is the controlled system, of which a particular quantity or condition is to be controlled.
- 2. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 2/11 2. Feedback Control System: A system which compares output to some reference input and keeps output as close as possible to this reference. 3. Closed-loop Control System: same as feedback control system. 4. Open-loop Control System: Output of the system is not feedback to the system. 5. The Control Elements ( )G s1 , also called the controller, are the components required to generate the appropriate control signal ( )M s applied to the plant. 6. The Feedback Elements ( )H s is the components required to establish the functional relationship between the primary feedback signal ( )B s and the controlled output ( )C s . 7. The Reference Input ( )R s is an external signal applied to a feedback control system in order to command a specified action of the plant. It often represents ideal plant output behavior. 8. The Controlled Output ( )C s is that quantity or condition of the plant which is controlled. 9. The Primary Feedback signal ( )B s is a signal which is a function of the controlled output ( )C s , and which is algebraically summed with the reference input ( )R s to obtain the actuating signal ( )E s . 10. The Actuating Signal ( )E s , also called the error or control action, is the algebraic sum consisting of the reference input ( )R s plus or minus (usually minus) the primary feedback ( )B s . 11. The Manipulated Variable ( )M s (control signal) is that quantity or condition which the control elements ( )G s1 apply to the plant ( )G s2 . 12. A Disturbance ( )U s is an undesired input signal which affects the value of the controlled output ( )C s . It may enter the plant by summation with ( )M s , or via an intermediate point, as shown in the block diagram of the figure above. 13. The Forward Path is the transmission path from the actuating signal e to the controlled output ( )C s . 14. The Feedback Path is the transmission path from the controlled output ( )C s to the primary feedback signal ( )B s . 15. Summing Point: A circle with a cross is the symbol that indicates a summing point. The ( )+ or ( )− sign at each arrowhead indicates whether that signal is to be added or subtracted. 16. Branch Point: A branch point is a point from which the signal from a block goes concurrently to other blocks or summing points.
- 3. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 3/11 10.2 BLOCK DIAGRAMS AND THEIR SIMPLIFICATION Definitions: ( )C s( )R s ( )G s ( )H s ( )B s ( )E s Figure 10-3 Block diagram of a closed-loop system with a feedback element. 1. ( )G s ≡Direct transfer function = Forward transfer function 2. ( )H s ≡Feedback transfer function 3. ( ) ( )G s H s ≡ Open-loop transfer function 4. ( ) ( )C s R s ≡ Closed-loop transfer function = Control ratio 5. ( ) ( )C s E s ≡Feedforward transfer function Closed Loop Transfer Function: For the system shown in Figure 10-3, the output ( )C s and input ( )R s are related as follows: ( ) ( ) ( )=C s G s E s where ( ) ( ) ( ) ( ) ( ) ( )= − = −E s R s B s R s H s C s Eliminating ( )E s from these equations gives ( ) ( ) ( ) ( ) ( )[ ]= −C s G s R s H s C s This can be written in the form ( ) ( )[ ] ( ) ( ) ( )+ =G s H s C s G s R s1 or ( ) ( ) ( ) ( ) ( ) = + C s G s R s G s H s1 The Characteristic equation of the system is defined as an equation obtained by setting the denominator polynomial of the transfer function to zero. The Characteristic equation for the above system is ( ) ( )G s H s+ =1 0.
- 4. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 4/11 Block Diagram Reduction Rules In many practical situations, the block diagram of a Single Input-Single Output (SISO), feedback control system may involve several feedback loops and summing points. In principle, the block diagram of (SISO) closed loop system, no matter how complicated it is, it can be reduced to the standard single loop form shown in Figure 10-3. The basic approach to simplify a block diagram can be summarized in Table 1: TABLE 10-1 Block Diagram Reduction Rules 1 Combine all cascade blocks 2 Combine all parallel blocks 3 Eliminate all minor (interior) feedback loops 4 Shift summing points to left 5 Shift takeoff points to the right 6 Repeat Steps 1 to 5 until the canonical form is obtained TABLE 10-2. Some Basic Rules with Block Diagram Transformation G1u 2u y 1/G 1u 1 y G u u y G = = y Gu= Gu u y ( )2 1 2e G u u= − Gu y y G G1u 2u y G1u 2u y G u y y G u y 1/G Gu G 2u y 1 2y Gu u= − u ( )1 2y G G u= −1G y21/G2G ( )Y GG X= 1 21G Y2GX ( )Y G G X= ±1 2 1G 2G X Y±±±± 1 2G GX Y 1 2±G GX Y
- 5. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 5/11 █ Example 1 A feedback system is transformed into a unity feedback system
- 6. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 6/11 = ± ⋅= ± = GH GH HGH G R C 1 1 1 Closed-loop Transfer function █ Example 2 Let us reduce the following block diagram to canonical form. ⇒⇒⇒⇒ ⇒⇒⇒⇒ ⇒⇒⇒⇒ Step 4: ⇒⇒⇒⇒ █ Example 3
- 7. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 7/11
- 8. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 8/11 █ Example 4 Use block diagram reduction to simplify the block diagram below into a single block relating ( )Y s to ( )R s . █ Solution
- 9. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 9/11 █ Example 5 Use block diagram algebra to solve the previous example. █ Solution Multiple-Inputs cases In feedback control system, we often encounter multiple inputs (or even multiple output cases). For a linear system, we can apply the superposition principle to solve this type of problems, i.e. to treat each input one at a time while setting all other inputs to zeros, and then algebraically add all the outputs as follows: TABLE 10-3: Procedure For reducing Multiple Input Blocks 1 Set all inputs except one equal to zero 2 Transform the block diagram to solvable form. 3 Find the output response due to the chosen input action alone 4 Repeat Steps 1 to 3 for each of the remaining inputs. 5 Algebraically sum all the output responses found in Steps 1 to 5
- 10. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 10/11 █ Example 6 We shall determine the output C of the following system: █ Solution Step1: Put 0≡U Step2: The system reduces to Step 3: The output RC due to input R is R GG GG CR ⋅ + = 21 21 1 Step 4a: Put R = 0. Step 4b: Put -1 into a block, representing the negative feedback effect: Rearrange the block diagram: Let the -1 block be absorbed into the, summing point: Step 4c: By Equation (7.3), the output UC due to input U is U GG G CU ⋅ + = 21 2 1 Step 5: The total output is C:
- 11. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 11/11 [ ]URG GG G U GG G R GG GG CCC UR +⋅ + =⋅ + +⋅ + =+= 1 21 2 21 2 21 21 111 █ Example 7
- 12. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 1/10 Chapter 10 Time-Domain Analysis and Design of Control Systems A. Bazoune 10.5 TRANSIENT RESPONSE SPECIFICATIONS Because systems that stores energy cannot respond instantaneously, they exhibit a transient response when they are subjected to inputs or disturbances. Consequently, the transient response characteristics constitute one of the most important factors in system design. In many practical cases, the desired performance characteristics of control systems can be given in terms of transient-response specifications. Frequently, such performance characteristics are specified in terms of the transient response to unit-step input, since such an input is easy to generate and is sufficiently drastic. (If the response of a linear system to a step input is known, it is mathematically possible to compute the system’s response to any input). The transient response of a system to a unit step-input depends on initial conditions. For convenience in comparing the transient responses of various systems, it is common practice to use standard initial conditions: The system is at rest initially, with its output and all time derivatives thereof zero. Then the response characteristics can be easily compared. Transient-Response Specifications. The transient response of a practical control system often exhibits damped oscillations before reaching a steady state. In specifying the transient-response characteristics of a control system to a unit-step input, it is common to name the following:
- 13. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 2/10 1. Delay time, dT 2. Rise time, rT 3. Peak time, pT 4. Maximum overshoot, pM 5. Settling time, sT These specifications are defined next and are shown in graphically in Figure 10-21. Delay Time. The delay time dT is the time needed for the response to reach half of its final value the very first time. Rise Time. The rise time rT is the time required for the response to rise from 10% to 90%, 5% to 95%, or 0% to 100% of its final value. For underdamped second order systems, the 0% to 100% rise time is normally used. For overdamped systems, the 10% to 90% rise time is common. Peak Time. The peak time pT is the time required for the response to reach the first peak of the overshoot. Maximum (percent Overshoot). The maximum percent overshoot pM is the maximum peak value of the response curve [the curve of ( )c t versus t ], measured from ( )c ∞ . If ( ) 1c ∞ = , the maximum percent overshoot is 100%pM × . If the final steady state value ( )c ∞ of the response differs from unity, then it is common practice to use the following definition of the maximum percent overshoot: ( ) ( ) ( ) 100Maximum percent overshoot % pC t C C − ∞ = × ∞ Settling Time.The settling time sT is the time required for the response curve to reach and stay within 2% of the final value. In some cases, 5%instead of 2%, is used as the percentage of the final value. The settling time is the largest time constant of the system. Comments. If we specify the values of dT , rT , pT , sT and pM , the shape of the response curve is virtually fixed as shown in Figure 10.22. Figure 10-22 Specifications of transient-response curve.
- 14. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 3/10 A Few Comments on Transient Response-Specifications. In addition of requiring a dynamic system to be stable, i.e., its response does not increase unbounded with time (a condition that is satisfied for a second order system provided that 0ζ ≥ , we also require the response: • to be fast • does not excessively overshoot the desired value (i.e., relatively stable) and • to reach and remain close to the desired reference value in the minimum time possible. Second-Order Systems and Transient-Response-Specifications. The response for a unit step input of an underdamped second order system ( )0 1ζ< < is given by ( ) 2 2 1 sin cos 1 1 sin cos 1 ζω ζω ζω ζ ω ω ζ ζ ω ω ζ − − − = − − − = − + − n n n t t d d t d d c t e t e t e t t (10-13) or ( ) 2 1 2 1 1 sin tan 1 ζω ζ ω ζζ − − − = − + − n t d e c t t (10-14) A family of curves ( )c t plotted against t with various values of ζ is shown in Figure 10-24. 2 2 2 2 n n ns s ω ζ ω ω+ + − − − − − Input t ( )u t 1 0 2 4 6 8 10 12 14 16 18 20 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 Step Response Time (sec) Amplitude ζ = 0.2 0.5 0.7 1 2 5 Output _______________ Figure 10-24 Unit step response curves for a second order system.
- 15. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 4/10 Delay Time. We define the delay time by the following approximate formula: 1 0 7. d n T ζ ω + = Rise Time. We find the rise time rT by letting ( ) 1rc T = in Equation (10-13), or ( ) 2 1 1 sin cos 1 ζω ζ ω ω ζ − = = − + − n r T d dr r rc T e T T (10-15) Since 0ζω− ≠n t e , Equation (10-15) yields 2 sin cos 0 1 ζ ω ω ζ + = − d dr rT T or 2 1 tan ζ ω ζ − = −d rT Thus, the rise rT is 2 1 11 tan ζ ω ζ ω π β− − = − − = d d rT (10-16) where β is defined in Figure 10-25. Clearly to obtain a large value of rT we must have a large value of β . O σ S-plane jω nω σ− nζω 2 1nω ζ− djω β ( ) ( ) 1 1 2 2 1 cos or sin 1 1 or tan β ζ β ζ ζ β ζ − − − = = − − = Figure 10-25 Definition of angle β Peak Time. We obtain the peak time pT by differentiating ( )c t in Equation (10-13), with respect to time and letting this derivative equal zero. That is,
- 16. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 5/10 ( ) 2 sin 0 1 ζωω ω ζ − = = − n tn de dc t t dt It follows that sin 0ω =dt or 0, , 2 , 3 ,... , 0,1,2.....ω π π π π= = =dt n n Since the peak time pT corresponds to the first peak overshoot ( )1n = , we have ω π=d pT . Then 2 1 π π ω ω ζ = = − p d n T (10-17) The peak time pT corresponds to one half-cycle of the frequency damped oscillations. Maximum Overshoot pM The maximum overshoot pM occurs at the peak π ω=p dT . Thus, from Equation (10-13), ( ) ( ) 2 1 1 0 1 sin cos n d p pM c T e ζω π ω ζ π π ζ − = − − − = + − = = or 21 pM e πζ ζ− − = (10-18) Since ( ) 1c ∞ = , the maximum percent overshoot is 21 100% %pM e πζ ζ− − ×= The relationship between the damping ratio ζ and the maximum percent overshoot is shown in Figure 10-26. Notice that no overshoot for 1ζ ≥ and overshoot becomes negligible for 0 7.ζ > .
- 17. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 6/10 Figure 10-26 Relationship between the maximum percent overshoot %pM and damping ratio ζ Settling Time sT Based on 2%criterion the settling time sT is defined as: ( ) ( ) 4 0 02 0 02 0 02 ln ln . . .n s s n n n sT T T e ζω ζω ζω ζω − − = = ≈ − = ⇒ ( ) 4 2% Criterion n sT ζω = (10-19) Similarly for 5%we can get ( ) 3 5% Criterion n sT ζω = (10-20)
- 18. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 7/10 REVIEW AND SUMMARY TRANSIENT RESPONSE SPECIFICATIONS OF A SECOND ORDER SYSTEM TABLE 1. Useful Formulas and Step Response Specifications for the Linear Second-Order Model )(tfxkxcxm =++ where m, c, k constants 1. Roots m mkcc s 2 42 2,1 −±− = 2. Damping ratio or mkc 2/=ζ 3. Undamped natural frequency m k n =ω 4. Damped natural frequency 2 1 ζωω −= nd 5. Time constant ncm ζωτ /1/2 == if 1≤ζ 6. Logarithmic decrement 2 1 2 ζ πζ δ − = or 22 4 δπ δ ζ + = 7. Stability Property Stable if, and only if, both roots have negative real parts, this occurs if and only if , m, c, and k have the same sign. 8. Maximum Percent Overshoot: The maximum % overshoot pM is the maximum peak value of the response curve. 2 1/ 100 ζπζ −− = eM p 9. Peak time: Time needed for the response to reach the first peak of the overshoot 2 1/p nT π ω ζ= − 10. Delay time: Time needed for the response to reach 50% of its final value the first time 1 0 7. d n T ζ ω + ≈ 11. Settling time: Time needed for the response curve to reach and stay within 2% of the final value 4 s n T ζω = 12. Rise time: Time needed for the response to rise from (10% to 90%) or (0% to 100%) or (5% to 95%) of its final value r d T π β ω − = (See Figure 10-25)
- 19. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 8/10 SOLVED PROBLEMS █ Example 1 Figure 4-20 (for Example 1) █ Example 2
- 20. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 9/10 Figure 4-21 (for Example 2) █ Solution First The transfer function of the system is █ Example 3 (Example 10-2in the Textbook Page 520-521) Determine the values of dT , rT , pT , sT when the control system shown in Figure 10-28 is subject to a unit step input
- 21. ME 413 Systems Dynamics & Control Chapter 10: Time-Domain Analysis and Design of Control Systems 10/10 ( ) 1 1+s s ( )C s( )R s Figure 10-28 Control System █ Solution The closed-loop transfer function of the system is ( ) ( ) ( ) ( ) 2 1 1 1 1 11 1 C s s s R s s s s s + = = + ++ + Notice that 1nω = rad/s and 0 5.ζ = for this system. So 2 2 1 1 0 5 0 866. .d n ω ω ζ= − = − = Rise Time. ω π β− = d rT where ( ) ( )1 1 0 866 1 1 05sin sin . .d nβ ω ω− − = = = rad or ( ) ( ) ( )1 1 1 0 5 1 05 cos cos cos d . ra. n nβ ζω ω ζ− − − = = = = Therfore, 1.05 2.41 0.866 π − = =rT s Peak Time. 3 63 0 866 . . p d T π π ω = = = s Delay Time. ( )1 0 7 0 51 0 7 1 35 1 . .. .d n T ζ ω ++ = = = s σ jω nω σ− nζω 2 1nω ζ− djω β Maximum Overshoot : 1 81 2 21 0 5 1 0 5 0 163 16 3.. . . . %pM e e eπζ ζ π −− − − × − = = = == Settling time: 4 4 8 0 5 1. s n T ζω = = = × s
- 22. ME 413 Systems Dynamics & Control Section 10-4: Stability 1/20 9 Chapter 10 Time Domain Analysis and Design of Control System A. Bazoune 10.7 STABILITY ANALYSIS Stability Conditions Using Rolling Ball The base of the hollow is in equilibrium point. If the ball is displaced a small distance from this position and released, it oscillates but ultimately returns to its rest position at the base as it loses energy as a result of friction. This is therefore a stable equilibrium point. (With no energy dissipation the ball would roll back and forth forever and exhibit neutral stability). The ball is in equilibrium if placed exactly at the top of the surface, but if it is displaced an infinitesimal distance to either side, the net gravitational force acting on it will cause it to roll down the surface and never return to the equilibrium point. This equilibrium is therefore unstable. The ball neither moves away nor returns to its equilibrium position. The flat portion represents a neutrally stable region.
- 23. ME 413 Systems Dynamics & Control Section 10-4: Stability 2/20 Stability Analysis in the Complex Plane The stability of a linear closed-loop system can be determined from the location of the closed-loop poles in the s-plane. If any of these poles lie in the Right-Half of the s-plane (RHS), then with increasing time, they give rise to the dominant mode, and the transient response increases monotonically or oscillates with increasing amplitude. Either of these motions represents an unstable motion. Location of roots of characteristic equations and the corresponding impulse response For such a system, as soon as the power is turned on, the output may increase with time. If no saturation takes place in the system and no mechanical stop is provided, then the system may eventually be damaged and fail, since the response of a real physical system cannot increase indefinitely. Stability may be defined as the ability of a system to restore its equilibrium position when disturbed or a system which has a bounded response for a bounded output. Consider a simple feedback system ( )C s( )E s( )R s ( )G s ( )H s The overall transfer function is given by ( ) ( ) ( ) ( ) ( )1 C s G s R s G s H s = + The denominator of the transfer function ( ) ( )1 G s H s+ is known as the characteristic polynomial. The characteristic equation is of the above system is ( ) ( )1 0G s H s+ = What are the roots of the characteristic equation?
- 24. ME 413 Systems Dynamics & Control Section 10-4: Stability 3/20 Let us write the characteristic equation in the form: ( ) ( )( )( ) ( ) ( )( )( ) ( ) 1 2 3 1 2 3 ... ... n m s z s z s z s z T s s p s p s p s p − − − − = − − − − where 1 1, ,..., nz z z are the zeros of ( )T s and 1 1, ,..., mp p p are the poles of ( )T s . If the input ( )R s is given then ( ) ( ) ( )C s T s R s= or ( ) ( )( )( ) ( ) ( )( )( ) ( ) ( )( )( ) ( ) ( )( )( ) ( ) 1 2 3 1 2 3 ...... ... ... i ii iii jn m i ii iii k s z s z s z s zs z s z s z s z C s s p s p s p s p s p s p s p s p − − − − − − − − = − − − − − − − − In order to compute the output, we resort the above equation into partial fraction expansion ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1 21 2 1 2 ... ... ijn i i m i ii ik KK K KK K C s s p s p s p s p s p s p = + + + + + + + − − − − − − The first bracket contains time that originates from the system itself. Terms in the first bracket will give rise to time in the form 1 2 1 2, ,..., np t p t p t nK e K e K e where p j tσ ω= + . The above expression can be rewritten as 1 21 2 1 2, ,..., nnj t j t j t nK e e K e e K e eω ω ωσσ σ Terms of the imaginary exponent are basically sinusoidal functions(which will never die away). Terms with real exponent must have negative values in order to force the sinusoidal functions to approach a very small magnitude (die away). The location of the roots of the characteristic equation on the s-plane will indicate the condition of stability. Stable region Unstable region Im Re Margin Stability s-plane s jσ ω= +
- 25. ME 413 Systems Dynamics & Control Section 10-4: Stability 4/20 Routh Stability criterion The characteristic equation of the simple feedback system can be written as ( ) ( ) ( ) 1 2 1 2 1 01 0n n n n n nF s G s H s a s a s a s a s a− − − −= + = + + + + + = Two Necessary But Insufficient Conditions There are two necessary but insufficient conditions for the roots of the characteristic equation to lie in Left Hand Side (LHS)-plane (i.e., stable system) 1. All the coefficients 1 2 1, , ,... ,n n na a a a− − and 0a should have the same sign. 2. None of the coefficients vanish (All coefficients of the polynomial should exist). █ Example 1 Given the characteristic equation, ( ) 6 5 4 3 2 24 3 4 4a s s s s s s s= + + + + +− Is the system described by this characteristic equation stable?
- 26. ME 413 Systems Dynamics & Control Section 10-4: Stability 5/20 █ Solution One coefficient (-2) is negative. Therefore, the system does not satisfy the necessary condition for stability. █ Example 2 Given the characteristic equation, ( ) 6 5 4 2 4 3 4 4a s s s s s s= + + + + + Is the system described by this characteristic equation stable? █ Solution The term 3 s is missing. Therefore, the system does not satisfy the necessary condition for stability. Necessary and Sufficient Condition The necessary and sufficient condition for the roots of the characteristic equation to lie in Left Hand Side (LHS)-plane (i.e., stable system) is 0 1 2 3Polynomial Hurwitz Determinant , , , ...kD k> = (4) This criterion is an algebraic method that: 1. provides information on the absolute stability of a Linear Time Invariant (LTI) system that has a characteristic equation with constant coefficients. 2. indicates whether any of the roots of the characteristic equation lie in (RHS)- plane. 3. indicates the number of roots that lie on the jω -axis and gives the range of some system parameters over which the system can be stable. How to Apply the Test Let us write the characteristic equation in the form: ( ) ( ) ( ) 1 2 1 2 1 01 0n n n n n nF s G s H s a s a s a s a s a− − − −= + = + + + + + = Step 1: Arrange the coefficients of the above equation into two rows. The first row consists of the first, third, fifth, …, coefficients. The second row consists of the second, fourth, sixth,…, coefficients, all counting from the highest term as shown in the tabulation below na 2na − 4na − 6na − 1na − 3na − 5na − 7na −
- 27. ME 413 Systems Dynamics & Control Section 10-4: Stability 6/20 Step 2: Form the following array of numbers by the indicated operations, illustrated here for a sixth-order equation: 6 5 4 3 2 6 5 4 3 2 1 0 0a s a s a s a s a s a s a+ + + + + + = 6s 5s 4 s 3 s 2 s 1 s 0 s 6a 4a 2a 0a 5a 3a 1a 0 5 4 6 3 5 = − A a a a a a 5 2 6 1 5 = − B a a a a a 0 5 0 6 5 0 = − × a a a a a 53 = − C Aa a B A 051 = − D Aa a a A 5 0 0 0 = × − ×A a A = − E BC AD C 0 0 0 = − × a Ca A C 0 0 0 = × − ×C A C 0 = − F ED Ca E 0 0 0 0 0 0 0 0 0 = − × a Fa E F 0 0 0 The previous table can also be obtained as follows:
- 28. ME 413 Systems Dynamics & Control Section 10-4: Stability 7/20 6s 5s 4 s 3 s 2 s 1 s 0 s 6a 4a 2a 0a 5a 3a 1a 0 6 4 5 3 5 = − A a a a a a 6 2 5 1 5 = − B a a a a a 0 6 0 5 5 0 = − a a a a a 5 3 = − C a a A B A 0 5 1 = − D a a A a A 5 0 0 0 = − a A A = − E A C B D C 0 0 0 = − a A C a C 0 0 0 = − A C C 0 = − F C E D a E 0 0 0 0 0 0 0 0 0 = − a E F a F 0 0 0 █ Example 1 Given ( ) ( )2 5 4 3 2 2 2 25 3 9 16 10 s s H s s s s s s + + = + + + + + Check whether this system is stable or not. █ Solution The characteristic equation is: 5 4 3 2 3 9 16 10 0s s s s s+ + + + + = Construct the Routh array
- 29. ME 413 Systems Dynamics & Control Section 10-4: Stability 8/20 5s 1 3 16 0 4s 1 9 10 0 3s 1 3 9 1 6 1 × − × = − 1 16 10 1 6 1 × − × = 0 0 2s 6 9 6 1 10 6 − × − × = − 6 10 0 1 10 6 − × − × = − 0 0 1s ( )10 6 10 6 12 10 × − × − = ( )10 0 0 6 0 10 × − × − = 0 0 0s ( )12 10 0 10 10 12 × − × = 0 0 0 There are 2 sign changes. There are 2 poles on the right half of the “s” plane. Therefore, the system is unstable. Pole-Zero Map Real Axis ImaginaryAxis -1.5 -1 -0.5 0 0.5 1 -5 -4 -3 -2 -1 0 1 2 3 4 5 pzmap plot █ Example 2 In the figure below, determine the range of K for the system to be stable ( )C s( )E s( )R s ( )( )1 2 K s s s+ + █ Solution: The characteristic equation is: ( )( ) 1 ( ) ( ) 1 0 1 2 + = + = + + K G s H s s s s or ( )( ) 3 2 1 2 0 3 2 0+ + + = ⇒ + + + =s s s K s s s K
- 30. ME 413 Systems Dynamics & Control Section 10-4: Stability 9/20 Construct the Routh array 3s 1 2 0 2s 3 K 0 1s 2 3 1 6 3 3 K K× − × − = 0 0 0s 6 3 0 3 6 3 K K K K − × − × = − 0 0 For the system to be stable we must have the following two conditions satisfied simultaneously: i) 0>K and ii) 6 0 6 0 6 3 − > ⇒ − > ⇒ < K K K The above two conditions can be shown graphically on the real line 0 1 2 3 4 5 6−∞ +∞ 0>K 6<K 0 6< <K The intersection of the two conditions above gives the condition for the stability of the above system, that is 0 6< <K . What will happen if 0=K or 6=K ? For 0=K , the above characteristic equation becomes 3 2 3 2 0 0+ + + =s s s or ( ) + + = ⇒ = − = − = ⇒ 2 0 The system is marginally stable 3 2 0 1 2 s s s s s s For 6=K , the above characteristic equation becomes 3 2 3 2 6 0+ + + =s s s or ( ) ( )2 2 3 03 =+ + +s ss or ( )( ) = − + = + ⇒ = − ⇒ + = ⇒ 2 2 The system is marginally stable 2 The system is marginally stable 3 3 2 0 s j s s j s s
- 31. ME 413 Systems Dynamics & Control Section 10-4: Stability 10/20 The frequency of oscillations in the previous case is 2 rad/s. Special Cases i) Zero Coefficient in the First Column of the Routh’s Array When the first term in a row is zero, the following element of (power-1) s will be infinite. One of the following methods may be used. 1 Substitute for = 1 s x in the original equation The same criterion applies for x . Then solve for x . 2 Multiply the original equation by ( )+s a , 1, 2,3,...,=a This introduces an additional negative root. Then follow the same procedure to check for stability. 3 Substitute a small parameter ε for the 0 . Complete the array and take the limit as 0ε → . █ Example 3 Check whether the following system given by its characteristic equation is stable or not ( )Γ = + = + + + + =4 3 2 1 ( ) ( ) 2 2 5 0s G s H s s s s s █ Solution Construct the Routh array 4s 1 2 5 3s 1 2 0 2s 1 2 1 2 0 1 × − × = 1 5 1 0 5 1 × − × = 1s 0s Method 1: Substitute for 1 =s x in the original equation. The above characteristic equation is: Zero element in the first column, we can’t continue as usual.
- 32. ME 413 Systems Dynamics & Control Section 10-4: Stability 11/20 ( ) 4 3 2 2 2 5 0Γ = + + + + =s s s s s Substitute 1 =s x in the above ( ) ( ) ( ) ( ) ( ) 4 3 2 1 1 2 1 2 1 5 0= + + + + =B x x x x x or ( ) 4 3 2 5 2 2 1 0= + + + + =B x x x x x 4x 5 2 1 3x 2 1 0 2x 2 2 1 5 1 2 2 × − × − = 1 1x ( ) ( ) 1 2 1 1 2 5 1 2 − × − × = − 0 0x 1 There are two sign changes. Therefore, there are 2 roots that lie on the right half of the s-plane. The system is unstable. Method 2: Multiply by ( )+s a in the original equation. Let 1=a an arbitrary value. Notice that if we get again a zero in the first column, this means that 1=a is a root of the polynomial. In this case change the value ofa . For 1=a , the above polynomial becomes ( ) ( ) ( )= + + ++ + W 4 3 2 e are multiplying by Previous this quantit Polyn y omial 2 2 51B s s s s ss or ( ) = + + + + +5 4 3 2 2 3 4 7 5B s s s s s s 5s 1 3 7 0 4s 2 4 5 0 3s × − × = + 2 3 1 4 1 2 × − × = 2 7 1 5 9 2 2 0 0 2s ( )× − × = − 1 4 9 2 2 5 1 × − × = 1 5 2 0 5 1 0 0 1s ( )− × − × = − 5 9 2 5 1 11 2 5 0 0s ( ) ( ) × − × = 11 2 5 0 5 5 11 2 ( )Γ s and ( )B x have same stability characteristic First Sign Change. Second Sign Change. First Sign Change. Second Sign Change.
- 33. ME 413 Systems Dynamics & Control Section 10-4: Stability 12/20 There are two sign changes. Therefore, there are 2 roots that lie on the right half of the s-plane. The system is unstable. Method 3: Substitute ε for the zero element Remember the expression for ( )Γ = + + + +4 3 2 2 2 5s s s s s . The Routh array is 4s 1 2 5 3s 1 2 0 2s 1 2 1 2 0 1 ε× − × = 1 5 1 0 5 1 × − × = 1s ε ε ε × − × = − = −∞ 2 5 1 5 2 0 0s ε ε ε × − − × = − 5 5 2 0 5 5 2 There are two sign changes. Therefore, there are 2 roots that lie on the right half of the s-plane. The system is unstable. The roots of ( )Γ s can be solved by MATLAB MATLAB PROGRAM: >> Q=[1 1 2 2 5]; >> roots (Q) ans = 0.5753 + 1.3544i 0.5753 - 1.3544i -1.0753 + 1.0737i -1.0753 - 1.0737i Pole-Zero Map Real Axis ImaginaryAxis -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 -1.5 -1 -0.5 0 0.5 1 1.5 Tends to −∞ as ε → 0 0 is substituted by ε First Sign Change. Second Sign Change. 2 roots with positive real parts 0.5753. They will lie in the right half of the s-plane as shown in the pzmap
- 34. ME 413 Systems Dynamics & Control Section 10-4: Stability 13/20 ii) A Row of Zeros This situation occurs when the characteristic equation has a pair of real roots with opposite sign ( )± r , complex conjugate roots on the imaginary axis ( )ω± j , or a pair of complex conjugate roots with opposite real parts ( )− ± ±,a jb a jb as shown in the figure below. The procedure to overcome this situation is as follows: 1. Form the “auxiliary equation” as shown in the example below from the preceding row. 2. Complete Routh array by replacing the zero row with the coefficients obtained by differentiating the auxiliary equation. 3. Roots of the auxiliary equation are also roots of the characteristic equation (i.e., ( ) ( ) ( )= + =1 0Q s G s H s ). The roots of the auxiliary equation occur in pairs and are of opposite sign of each other. In addition the auxiliary equation is always “even” order. █ Example 3 Check whether the following system given by its characteristic equation is stable or not ( ) = + = + + + + + =5 4 3 2 1 ( ) ( ) 5 11 23 28 12 0A s G s H s s s s s s █ Solution Step 1 Form the auxiliary equation ( ) = 0a s by use of the coefficients from the row just preceding the row of zeros.
- 35. ME 413 Systems Dynamics & Control Section 10-4: Stability 14/20 Step 2 Take the derivative of the auxiliary equation ( )[ ]d d a s s with respect to s . Step 3 Replace the row of zeros with the coefficients of ( )[ ]d d a s s . Step 4 Continue with Routh’s tabulation in the usual manner with the newly formed row of coefficients replacing the row of zeros. Step 5 Interpret the change of signs, if any, of the coefficients in the first column of Routh’s tabulation in the usual manner. 5s 1 11 28 4s 5 23 12 3s 5 11 1 23 6 4 5 × − × = . 5 28 12 1 25 6 5 × − × = . 0 2s × − × = 6.4 23 25.6 5 6.4 3 × − × = 6.4 12 0 5 6.4 12 0 1s × − × = 3 25.6 6.4 12 3 0 0 Row of zeros 0s The auxiliary equation is ( ) = +2 3 12a s s and ( )[ ] = d 6 d a s s s The zeros in the row of 1s are replaced by the coefficient of the derivative of the auxiliary equation ( )[ ] = d 6 d a s s s 1s 6 0 0s × − × = 6 12 0 3 6 6 There are no sign changes in the first column of the Routh array. All roots have negative real parts except for a pair on the imaginary axis. Roots of the auxiliary equation are ( ) ( )= = ⇒= = ±+ +2 2 11 ,23 12 3 4 0 2a s s s js Roots of the characteristic equation are
- 36. ME 413 Systems Dynamics & Control Section 10-4: Stability 15/20 ( ) = − = − = + + + + + = ⇒ = + = − = − 1 25 4 3 2 3 4 5 3 (real) 2 5 11 23 28 12 0 complex conjugates 2 1 real repeated 1 s s j A s s s s s s s j s s Pole-Zero Map Real Axis ImaginaryAxis -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 Limitations It should be reiterated that the Routh-Hurwitz criterion is valid only if the characteristic equation is algebraic with real coefficients. If any one of the coefficients is complex, or if the equation is not algebraic, such as containing exponential functions or sinusoidal functions of s , the Routh-Hurwitz criterion simply cannot be applied. Another limitation of the Routh-Hurwitz criterion is that it is valid only for the determination of the roots of the characteristic equation with respect to the left half or the right half of the s-plane. The stability boundary is just the ω −j axis of the −s plane. The criterion cannot be applied to any other stability boundaries in a complex plane, such as the unit circle in the −z plane, which is the stability of discrete data system.
- 37. ME 413 Systems Dynamics & Control Section 10-4: Stability 16/20 Solved Problems
- 38. ME 413 Systems Dynamics & Control Section 10-4: Stability 17/20
- 39. ME 413 Systems Dynamics & Control Section 10-4: Stability 18/20
- 40. ME 413 Systems Dynamics & Control Section 10-4: Stability 19/20
- 41. ME 413 Systems Dynamics & Control Section 10-4: Stability 20/20
- 42. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 1/15 Chapter 10 Time-Domain Analysis and Design of Control Systems A. Bazoune 10.5 STEADY STATE ERRORS AND SYSTEM TYPES Steady-state errors constitute an extremely important aspect of the system performance, for it would be meaningless to design for dynamic accuracy if the steady output differed substantially from the desired value for one reason or another. The steady state error is a measure of system accuracy. These errors arise from the nature of the inputs, system type and from nonlinearities of system components such as static friction, backlash, etc. These are generally aggravated by amplifiers drifts, aging or deterioration. The steady-state performance of a stable control system is generally judged by its steady state error to step, ramp and parabolic inputs. Consider a unity feedback system as shown in the Figure. The input is ( )R s , the output is ( )C s , the feedback signal ( )H s and the difference between input and output is the error signal ( )E s . ( )C s ( )H s ( )E s( )R s ( )G s From the above Figure ( ) ( ) ( ) ( )1 C s G s R s G s = + (1) On the other hand ( ) ( ) ( )C s E s G s= (2) Substitution of Equation (2) into (1) yields ( ) ( ) ( ) 1 1 E s R s G s = + (3) The steady-state error sse may be found by use of the Final Value Theorem (FVT) as follows: ( ) ( ) ( ) ( )0 0 1 lim lim limss t s s sR s e e t SE s G s→∞ → → = = = + (4) Equation (4) shows that the steady state error depends upon the input ( )R s and the forward transfer function ( )G s . The expression for steady-state errors for various types of standard test signals are derived next.
- 43. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 2/15 1. Unit Step (Positional) Input. Input ( ) ( )1r t t= or ( ) ( ) 1 R s L r t s = = From Equation (4) ( ) ( ) ( ) ( ) ( ) ( )0 0 0 1 1 1 1 1 1 1 1 0 1 lim lim limss s s s p s ssR s e G s G s G s G K→ → → = = = = = + + + + + ( )r t t 1 where ( )0pK G= is defined as the position error constant. 2. Unit Ramp (Velocity) Input. Input ( ) ( ) 1orr t t r t= = or ( ) ( ) 2 1 R s L r t s = = From Equation (4) ( ) ( ) ( ) ( ) ( ) ( ) 2 0 0 0 0 1 1 1 1 1 1 lim lim lim limss s s s s v s ssR s e G s G s s sG s sG s K→ → → → = = = = = + + + ( )r t t 1 1 where ( )0 limv s K sG s → = is defined as the velocity error constant. 3. Unit Parabolic (Acceleration) Input. Input ( ) ( )21 1 2 orr t t r t= = or ( ) ( ) 3 1 R s L r t s = = From Equation (4) ( ) ( ) ( ) ( ) ( ) ( ) 3 2 2 20 0 0 0 1 1 1 1 1 1 lim lim lim limss s s s s a s ssR s e G s G s s s G s s G s K→ → → → = = = = = + + + ( )r t t where ( )2 0 lima s K s G s → = is defined as the acceleration error constant.
- 44. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 3/15 10.6 TYPES OF FEEDBACK CONTROL SYSTEMS The open-loop transfer function of a unity feedback system can be written in two standard forms: • The time constant form ( ) ( )( ) ( ) ( )( ) ( ) 1 2 1 2 1 1 1 1 1 1 z z zj n p z zk K T s T s T s G s s T s T s T s + + + = + + + (8) where K and T are constants. The system type refers to the order of the pole of ( )G s at 0s = . Equation (8) is of type n. • The pole-zero form ( ) ( )( ) ( ) ( )( ) ( ) 1 2 1 2 ' j n k K s z s z s z G s s s p s p s p + + + = + + + (9) The gains in the two forms are related by ' j j k k z K K p = ∏ ∏ (10) with the gain relation of Equation (10) for the two forms of ( )G s , it is sufficient to obtain steady state errors in terms of the gains of any one of the forms. We shall use the time constant form in the discussion below. Equation (8) involves the term n s in the denominator which corresponds to number of integrations in the system. As 0s → , this term dominates in determining the steady-state error. Control systems are therefore classified in accordance with the number of integration in the open loop transfer function ( )G s as described below. 1. Type-0 System. If 0,n = ( ) 0 K G s K s = = the steady-state errors to various standard inputs, obtained from Equations (5), (6), (7) and (8) are ( ) ( ) ( ) ( ) ( ) ( ) 0 0 2 20 0 1 1 1 1 1 1 1 1 1 1 0 lim l Position im li Velocity Acceleration m lim ss p ss s s ss s s G K K e K e sG s s e s G s s K → → → → = = = + + + = = = ∞ = = = ∞ (11)
- 45. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 4/15 Thus a system with 0,n = or no integration in ( )G s has • a constant position error, • infinite velocity error and • infinite acceleration error 2. Type-1 System. If 1,n = ( ) 1 K G s s = , the steady-state errors to various standard inputs, obtained from Equations (5), (6), (7) and (8) are ( ) ( ) ( ) ( ) ( ) ( ) 0 0 0 20 0 2 1 1 1 0 1 0 11 1 1 1 1 1 1 1 0 lim lim li Positi m lim on Velocity Acceleration lim ss s ss s s v ss s s e G e sG s K Ks e s G s s K s K s K s → → → → → = = = = + + ∞+ = = = = = = = = ∞ (12) Thus a system with 1,n = or with one integration in ( )G s has • a zero position error, • a constant velocity error and • infinite acceleration error 3. Type-2 System. If 1,n = ( ) 2 K G s s = , the steady-state errors to various standard inputs, obtained from Equations (5), (6), (7) and (8) are ( ) ( ) ( ) ( ) ( ) ( ) 0 0 0 20 2 2 2 0 2 1 1 1 0 1 0 11 1 1 1 0 1 1 1 1 lim lim li Posit m lim ion Velocity Acceleration lim ss s ss s s ss s s a K s K s K K e G e sG s s s e s G s Ks → → → → → = = = = + + ∞+ = = = = ∞ = = = = (13) Thus a system with 2,n = or with one integration in ( )G s has • a zero position error, • a zero velocity error and • a constant acceleration error
- 46. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 5/15 TABLE 1. Steady-state errors in closed loop systems Type-0systemType-1systemType-2system 0 lim ( )p s K G s → = 0 lim ( )v s K sG s → = 2 0 lim ( )a s K s G s → = sse =∞ ss v A e K = ( )r t At= 0sse = sse =∞ sse =∞ ss a A e K = 21 2 ( )r t At= 1 ss p A e K = + ( )r t A= 0sse = 0sse = where ( )0pK G= is defined as the position error constant. where ( )0 limv s K sG s → = is defined as the velocity error constant. where ( )2 0 lima s K s G s → = is defined as the acceleration error constant.
- 47. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 6/15 10.7 STEADY STATE ERROR FOR NON-UNITY FEEDBACK SYSTEMS ( )C s( )E s( )R s ( )G s ( )H s Add to the previous block two feedback blocks ( )1 1H s = − and ( )1 1H s = ( )C s( )E s( )R s ( )G s ( )H s 1− Parallel blocks. Can be combined in one ( )C s( )E s( )R s ( )G s ( ) 1H s − ( )C s ( )E s( )R s ( ) ( ) ( ) ( )1 G s G s H s G s+ − ( )eG s
- 48. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 7/15 █ Example 1 For the system shown below, find • The system type • Appropriate error constant associated with the system type, and • The steady state error for unit step input ( )C s ( )E s( )R s ( ) 100 10s s + 1 5s+ █ Solution
- 49. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 8/15
- 50. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 9/15
- 51. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 10/15
- 52. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 11/15
- 53. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 12/15
- 54. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 13/15
- 55. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 14/15
- 56. ME 413 Systems Dynamics & Control Section 10-5: Steady State Errors and System Types 15/15
- 57. MCEN 467 – Control Systems Chapter 4:Chapter 4: Basic Properties of FeedbackBasic Properties of Feedback Part D: The Classical Three- Term Controllers
- 58. MCEN 467 – Control Systems Basic Operations of a Feedback Control Think of what goes on in domestic hot water thermostat: • The temperature of the water is measured. • Comparison of the measured and the required values provides an error, e.g. “too hot’ or ‘too cold’. • On the basis of error, a control algorithm decides what to do. → Such an algorithm might be: – If the temperature is too high then turn the heater off. – If it is too low then turn the heater on • The adjustment chosen by the control algorithm is applied to some adjustable variable, such as the power input to the water heater.
- 59. MCEN 467 – Control Systems Feedback Control Properties • A feedback control system seeks to bring the measured quantity to its required value or set-point. • The control system does not need to know why the measured value is not currently what is required, only that is so. • There are two possible causes of such a disparity: – The system has been disturbed. – The set point has changed. In the absence of external disturbance, a change in set point will introduce an error. The control system will act until the measured quantity reach its new set point.
- 60. MCEN 467 – Control Systems The PID Algorithm • The PID algorithm is the most popular feedback controller algorithm used. It is a robust easily understood algorithm that can provide excellent control performance despite the varied dynamic characteristics of processes. • As the name suggests, the PID algorithm consists of three basic modes: the Proportional mode, the Integral mode & the Derivative mode.
- 61. MCEN 467 – Control Systems P, PI or PID Controller • When utilizing the PID algorithm, it is necessary to decide which modes are to be used (P, I or D) and then specify the parameters (or settings) for each mode used. • Generally, three basic algorithms are used: P, PI or PID. • Controllers are designed to eliminate the need for continuous operator attention. → Cruise control in a car and a house thermostat are common examples of how controllers are used to automatically adjust some variable to hold a measurement (or process variable) to a desired variable (or set-point)
- 62. MCEN 467 – Control Systems Controller Output • The variable being controlled is the output of the controller (and the input of the plant): • The output of the controller will change in response to a change in measurement or set-point (that said a change in the tracking error) provides excitation to the plant system to be controlled
- 63. MCEN 467 – Control Systems PID Controller • In the s-domain, the PID controller may be represented as: • In the time domain: dt tde KdtteKteKtu d t ip )( )()()( 0 ++= ∫ )()( sEsK s K KsU d i p ++= proportional gain integral gain derivative gain
- 64. MCEN 467 – Control Systems PID Controller • In the time domain: • The signal u(t) will be sent to the plant, and a new output y(t) will be obtained. This new output y(t) will be sent back to the sensor again to find the new error signal e(t). The controllers takes this new error signal and computes its derivative and its integral gain. This process goes on and on. dt tde KdtteKteKtu d t ip )( )()()( 0 ++= ∫
- 65. MCEN 467 – Control Systems Definitions • In the time domain: ++= ++= ∫ ∫ dt tde Tdtte T teK dt tde KdtteKteKtu d t i p d t ip )( )( 1 )( )( )()()( 0 0 i d d i p i K K T K K Twhere == , proportional gain integral gain derivative gain derivative time constantintegral time constant
- 66. MCEN 467 – Control Systems Controller Effects • A proportional controller (P) reduces error responses to disturbances, but still allows a steady-state error. • When the controller includes a term proportional to the integral of the error (I), then the steady state error to a constant input is eliminated, although typically at the cost of deterioration in the dynamic response. • A derivative control typically makes the system better damped and more stable.
- 67. MCEN 467 – Control Systems Closed-loop Response Small change DecreaseDecreaseSmall change D EliminateIncreaseIncreaseDecreaseI DecreaseSmall change IncreaseDecreaseP Steady- state error Settling time Maximum overshoot Rise time • Note that these correlations may not be exactly accurate, because P, I and D gains are dependent of each other.
- 68. MCEN 467 – Control Systems Example problem of PID • Suppose we have a simple mass, spring, damper problem. • The dynamic model is such as: • Taking the Laplace Transform, we obtain: • The Transfer function is then given by: fkxxbxm =++ )()()()(2 sFskXsbsXsXms =++ kbsmssF sX ++ = 2 1 )( )(
- 69. MCEN 467 – Control Systems Example problem (cont’d) • Let • By plugging these values in the transfer function: • The goal of this problem is to show you how each of contribute to obtain: fast rise time, minimum overshoot, no steady-state error. Nf,m/Nk,m/s.Nb,kgm 120101 ==== 2010 1 )( )( 2 ++ = sssF sX dip KandKK ,
- 70. MCEN 467 – Control Systems Ex (cont’d): No controller • The (open) loop transfer function is given by: • The steady-state value for the output is: 2010 1 )( )( 2 ++ = sssF sX 20 1 )( )( )(lim)(lim)(lim 00 ==== →→∞→ sF sX ssFssXtxx sst ss
- 71. MCEN 467 – Control Systems Ex (cont’d): Open-loop step response • 1/20=0.05 is the final value of the output to an unit step input. • This corresponds to a steady-state error of 95%, quite large! • The settling time is about 1.5 sec.
- 72. MCEN 467 – Control Systems Ex (cont’d): Proportional Controller • The closed loop transfer function is given by: )20(10 2010 1 2010 )( )( 2 2 2 p p p p Kss K ss K ss K sF sX +++ = ++ + ++=
- 73. MCEN 467 – Control Systems Ex (cont’d): Proportional control • Let • The above plot shows that the proportional controller reduced both the rise time and the steady-state error, increased the overshoot, and decreased the settling time by small amount. 300=pK
- 74. MCEN 467 – Control Systems Ex (cont’d): PD Controller • The closed loop transfer function is given by: )20()10( 2010 1 2010 )( )( 2 2 2 pd dp dp dp KsKs sKK ss sKK ss sKK sF sX ++++ + = ++ + + ++ + =
- 75. MCEN 467 – Control Systems Ex (cont’d): PD control • Let • This plot shows that the proportional derivative controller reduced both the overshoot and the settling time, and had small effect on the rise time and the steady-state error. 10,300 == dp KK
- 76. MCEN 467 – Control Systems Ex (cont’d): PI Controller • The closed loop transfer function is given by: ip ip ip ip KsKss KsK ss sKK ss sKK sF sX ++++ + = ++ + + ++ + = )20(10 2010 / 1 2010 / )( )( 23 2 2
- 77. MCEN 467 – Control Systems Ex (cont’d): PI Controller • Let • We have reduced the proportional gain because the integral controller also reduces the rise time and increases the overshoot as the proportional controller does (double effect). • The above response shows that the integral controller eliminated the steady-state error. 70,30 == ip KK
- 78. MCEN 467 – Control Systems Ex (cont’d): PID Controller • The closed loop transfer function is given by: ipd ipd idp idp KsKsKs KsKsK ss sKsKK ss sKsKK sF sX +++++ ++ = ++ ++ + ++ ++ = )20()10( 2010 / 1 2010 / )( )( 23 2 2 2
- 79. MCEN 467 – Control Systems Ex (cont’d): PID Controller • Let • Now, we have obtained the system with no overshoot, fast rise time, and no steady-state error. 5500 ,300,350 = == d ip K KK
- 80. MCEN 467 – Control Systems Ex (cont’d): Summary PDP PI PID
- 81. MCEN 467 – Control Systems PID Controller Functions • Output feedback → from Proportional action compare output with set-point • Eliminate steady-state offset (=error) → from Integral action apply constant control even when error is zero • Anticipation → From Derivative action react to rapid rate of change before errors grows too big
- 82. MCEN 467 – Control Systems Effect of Proportional, Integral & Derivative Gains on the Dynamic Response
- 83. MCEN 467 – Control Systems Proportional Controller • Pure gain (or attenuation) since: the controller input is error the controller output is a proportional gain )()()()( teKtusUKsE pp =⇒=
- 84. MCEN 467 – Control Systems Change in gain in P controller • Increase in gain: → Upgrade both steady- state and transient responses → Reduce steady-state error → Reduce stability!
- 85. MCEN 467 – Control Systems P Controller with high gain
- 86. MCEN 467 – Control Systems Integral Controller • Integral of error with a constant gain → increase the system type by 1 → eliminate steady-state error for a unit step input → amplify overshoot and oscillations dtteKtusU s K sE t i i ∫=⇒= 0 )()()()(
- 87. MCEN 467 – Control Systems Change in gain for PI controller • Increase in gain: → Do not upgrade steady- state responses → Increase slightly settling time → Increase oscillations and overshoot!
- 88. MCEN 467 – Control Systems Derivative Controller • Differentiation of error with a constant gain → detect rapid change in output → reduce overshoot and oscillation → do not affect the steady-state response dt tde KtusUsKsE dd )( )()()( =⇒=
- 89. MCEN 467 – Control Systems Effect of change for gain PD controller • Increase in gain: → Upgrade transient response → Decrease the peak and rise time → Increase overshoot and settling time!
- 90. MCEN 467 – Control Systems Changes in gains for PID Controller
- 91. MCEN 467 – Control Systems Conclusions • Increasing the proportional feedback gain reduces steady- state errors, but high gains almost always destabilize the system. • Integral control provides robust reduction in steady-state errors, but often makes the system less stable. • Derivative control usually increases damping and improves stability, but has almost no effect on the steady state error • These 3 kinds of control combined from the classical PID controller
- 92. MCEN 467 – Control Systems Conclusion - PID • The standard PID controller is described by the equation: )( 1 1)( )()( sEsTs T KsUor sEsK s K KsU d i p d i p ++= ++=
- 93. MCEN 467 – Control Systems Application of PID Control • PID regulators provide reasonable control of most industrial processes, provided that the performance demands is not too high. • PI control are generally adequate when plant/process dynamics are essentially of 1st-order. • PID control are generally ok if dominant plant dynamics are of 2nd-order. • More elaborate control strategies needed if process has long time delays, or lightly-damped vibrational modes