ICT Role in 21st Century Education & its Challenges.pptx
Talk Florian Hartig at ISEC 2014 Montepellier / France
1. Florian Hartig
Department of Biometry and Environmental System Analysis
Florian Hartig
Department of Biometry and Environmental System Analysis
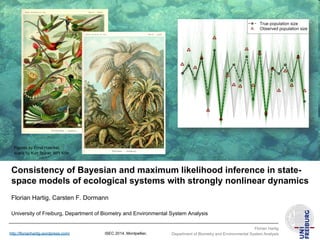
Consistency of Bayesian and maximum likelihood inference in state-
space models of ecological systems with strongly nonlinear dynamics
Florian Hartig, Carsten F. Dormann
University of Freiburg, Department of Biometry and Environmental System Analysis
http://florianhartig.wordpress.com/ ISEC 2014, Montpellier,
Figures by Ernst Haeckel,
scans by Kurt Stüber, MPI Köln
2. Florian Hartig
Department of Biometry and Environmental System Analysis
Page 2
Introduction: a strange result …
Claim: population models, fit in a Bayesian state-space
framework to data produced by themselves (no model error),
lead to worse forecasts than a non-parametric forecasting
method; for chaotic dynamics, # data >> # parameters
3. Florian Hartig
Department of Biometry and Environmental System Analysis
Worrying, given that state-space models
widely advertised as state-of-the-art
Page 3
4. Florian Hartig
Department of Biometry and Environmental System Analysis
1: Population model – logistic map
Page 4
5. Florian Hartig
Department of Biometry and Environmental System Analysis
2: Process error on population dynamics
Page 5
6. Florian Hartig
Department of Biometry and Environmental System Analysis
3: Observation error on those dynamics
Page 6
7. Florian Hartig
Department of Biometry and Environmental System Analysis
4: The final observations (red triangles)
Page 7
8. Florian Hartig
Department of Biometry and Environmental System Analysis
State-space model to recover parameter
estimates from those observations
Page 8
Population model
Observation model
Observed data
SSM: calculate P(Observations|Parameter) by summing over all
possible „latent“ trajectories (state space), find parameters that
have the highest likelihood to „produce“ the observations
9. Florian Hartig
Department of Biometry and Environmental System Analysis
Growth rate estimates for increasing true
growth rates
Page 9
Model estimated with JAGS, median posterior values shown
No bias line
10. Florian Hartig
Department of Biometry and Environmental System Analysis
Hypothesis I
Why? Imagine you are the „statistical
model“
Page 10
Observations
Hypothesis II
Stable dynamics ------,
All variability from
observation error
Hypothesis I
Chaotic pop dynamics,
Medium observation error
Hypothesis II
11. Florian Hartig
Department of Biometry and Environmental System Analysis
Solution: chopping up the data
Page 11
Fit small chunks of
the data
independently,
Optimize joint
likelihood / posterior
Pisarenko & Sornette
(2004), Phys. Rev. E
12. Florian Hartig
Department of Biometry and Environmental System Analysis
Suddenly, all is fine
Page 12
Hartig, F. & Dormann, C. F. (2013) Does model-free forecasting really outperform the true model? PNAS, 110, E3975.
13. Florian Hartig
Department of Biometry and Environmental System Analysis
Conclusions / implications
► MLE / Bayesian inference can be asymptotically
inconsistent for nonlinear dynamical systems
► This conditions may readily occur in more complex predator-prey / food
web / host-parasitoid systems
► When / why?
► Asymptotic inconsistency formally proven by Judd (2007), Phys.
Rev. E for SSM + chaotic + observation error only
► Our conclusion (without formal proof): remains the same for
process << observation error, we think this is what happens
here.
► Additional consideration: if observation error sufficiently rigid,
likelihoods might get extremely ragged, problems for the
samplers, see Wood (2010) Nature, Wood & Fasiolo (plenary).
Page 13
14. Florian Hartig
Department of Biometry and Environmental System Analysis
Recommendations
► Be aware that parameter estimates in a state-
space framework can be massively biased if
the dynamics are strongly nonlinear.
► Remedies:
► Chopping up the data Pisarenko & Sornette (2004), Phys.
Rev. E
► Diagnose by comparing model / data with summary
statistics Judd (2007), Phys. Rev. E
► Use of ABC / synthetic likelihoods? Wood (2010) Nature,
Hartig et al. (2011), Ecol. Lett.
► Get strong data on observation models!
Page 14
15. Florian Hartig
Department of Biometry and Environmental System Analysis
Thank you!
Hartig, F. & Dormann, C. F. (2013) Does model-free forecasting really
outperform the true model? PNAS, 110, E3975.
Available at http://arxiv.org/abs/1305.3544 , code
https://github.com/florianhartig/
NonlinearOrChaoticBayesianStateSpaceModels
Page 15