Mais conteúdo relacionado
Semelhante a G空間expo2016パネル
Semelhante a G空間expo2016パネル (20)
Mais de Kurata Takeshi (20)
G空間expo2016パネル
- 1. 人間情報研究部門
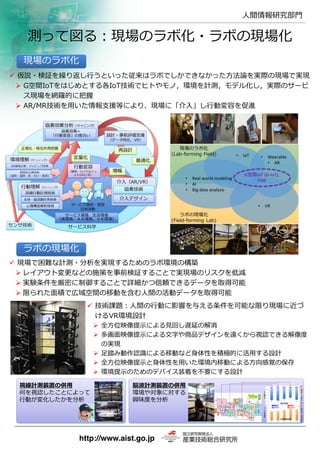
測って図る:現場のラボ化・ラボの現場化
現場のラボ化
ラボの現場化
視線計測装置の併用
何を視認したことによって
行動が変化したかを分析
脳波計測装置の併用
環境や対象に対する
興味度を分析
-3
-2.5
-2
-1.5
-1
-0.5
0
C1 C2 C3 C4 C5
脳波指標
周囲環境への興味度
高
低
ERP振幅(μV)
0
1
2
3
4
5
6
C1 C2 C3 C4 C5
主観評価結果
周囲環境への興味度
高
低
主観評価スケール
興味度が
低いエリア
興味度が
高いエリア
C4
C1
C2
C5
C3
C1 C2 C3 C4 C5
仮説・検証を繰り返し行うといった従来はラボでしかできなかった方法論を実際の現場で実現
G空間IoTをはじめとする各IoT技術でヒトやモノ,環境を計測,モデル化し,実際のサービ
ス現場を網羅的に把握
AR/MR技術を用いた情報支援等により、現場に「介入」し行動変容を促進
現場で困難な計測・分析を実現するためのラボ環境の構築
レイアウト変更などの施策を事前検証することで実現場のリスクを低減
実験条件を厳密に制御することで詳細かつ信頼できるデータを取得可能
限られた面積で広域空間の移動を含む人間の活動データを取得可能
技術課題:人間の行動に影響を与える条件を可能な限り現場に近づ
けるVR環境設計
全方位映像提示による見回し遅延の解消
多画面映像提示による文字や商品デザインを遠くから視認できる解像度
の実現
足踏み動作認識による移動など身体性を積極的に活用する設計
全方位映像提示と身体性を用いた環境内移動による方向感覚の保存
環境提示のためのデバイス装着を不要にする設計
- 5. ロボットイノベーション研究センター
高精度マーカによる測位と動作計測
--- 応用例1 ---
GPSを補強・補完する精密測位
◆ 撮影距離10mで誤差2cmの精密測位が可能な
「超」高精度マーカを開発
◆ GPSと相補的に使うことでグローバルな精密シ
ームレス測位が可能
◆ 自律移動体の確実な制御を支えるインフラに
・ 開発者: 田中 秀幸 / 国立研究開発法人 産業技術総合研究所 ロボットイノベーション研究センター 主任研究員 / hideyuki-tanaka@aist.go.jp
・ 高精度マーカ概要の動画: 「人と共栄する情報技術: 独自マーカによる高精度な位置姿勢計測」 https://www.youtube.com/watch?v=C_ZHV1ASR-0
計測
さまざまな応用可能性
ロボット
動作計測・キャリブレ
ーション等
ゲーム・展示・広告・
教育・ガイダンス等
産業ロボットやサービ
スロボットの制御
宇宙機制御用
ターゲットマーカ
屋内測位補助・
屋外GPS補完
2種類の高精度マーカ
黒い模様が見る角度に応じて移動する
特殊な干渉縞を利用
LentiMark
(レンチマーク)
ArrayMark
(アレイマーク)
レンチキュラーレンズ マイクロレンズアレイ
宇宙
測位
A R
高精度マーカ
◆ 産総研が2012年に開発した世界最高
の位置姿勢推定精度をもつ視覚マーカ
◆ 見る角度に応じて動いて見える干渉縞
パターンを利用
◆ 計測誤差は,姿勢は1deg未満,位置
は計測距離の最大0.3%程度.従来マー
カの誤差の1/10以下.
◆ 幅広 い分野への応用に期待
◆ 現在実用化に向けた最終段階
(20cm x 20cm x 1cm)
測位用高精度マーカ
カメラ
【 3次元位置誤差 】
測位用高精度マーカ 2.0cm
汎用高精度マーカ 4.5cm
4点マーカ 13.2cm
従来型ARマーカ 20cm以上
--- 応用例2 ---
ポータブル動作計測システム
◆ 1台のカメラとPC,複数のマーカで構成される簡易
モーションキャプチャ
◆ カバン1個で運搬可能.実験室での計測だけでなく
「その場」での計測を支援.
◆ 各測定点(マーカ)の位置と姿勢の双方を計測可能
◆ 位置誤差最大5mm,姿勢誤差最大2deg(参考値)
◆ 固定しない手持ちカメラでの計測にも対応
PC カメラ 基準マーカ
マーカ
計 測 例
産業への波及効果
ボール操作時の腕や手首の動き
移乗介助者の
脊椎の曲がり
や動き
歩行・走行時
の足の動き
Image frame
Right arm
Left arm
-70
-60
-50
-40
-30
-20
-10
0
10
20
0 50 100 150
利き手(右手)と非利き手での
手首の曲げ[deg]の違い
移動ロボット
<サービス産業等>
自動搬送車
<物流・製造業等>
自動車 <一般>
トラクター <農業>
ドローン <モニタリング等>
測位用高精度マーカ
- 6. 人工知能研究センター
世界中の各種衛星画像データを
閲覧・保存できます!
Landsat-8は2013年2月11日に米国が打ち上げた地球
観測衛星で、15~30mの空間分解能があり、可視・近
赤外・短波長赤外・熱赤外の帯域のデータを取得して
います。日本付近は2013年11月から 、他の地域は最
新の雲なし画像が閲覧・ダウンロードできます。
ASTER は1999 年 12 月 18 日に 米 国 が 打ち 上げた
TERRA衛星に搭載さ れた日本の地球観測センサで
す。可視・近赤外(15m)、短波長赤外(30m)、熱赤外
(90m)の帯域・空間分解能のデータを取得し ていま
す。2000年~現在の世界中の画像を閲覧・ダウンロー
ドできます。
Sentinal-2Aは2015年6月23日にヨーロッパ宇宙機関が
打ち上げた地球観測衛星で、可視・近赤外・短波長赤
外の帯域を10~60mの空間分解能でデータを取得し
ています。世界中の最新雲なし 画像が閲覧・ダウンロ
ードできます。
Landsat-8・ASTER・Sentinel-2A
グラフィックユーザインタフェース(LandBrowser)
産総研が公開するLandBrowserは、上に述べたLandsat-8、ASTER、Sentinel-2Aのデータと、2000~2003年の日本周辺
のLandsat-7のデータを閲覧・検索・ダウンロードするためのグラフィックユーザインタフェースです。観測位置の指定、ベ
ースマップの変更、衛星の選択、ベースマップを見るための画像の透明化ができます。
衛星データは膨大であり、人間がすべてを調べることはできません。人工知能技術(機械学習)を使って、地物認識(メ
ガソーラーやゴルフ場)、変化検知、高温検知などの研究を行っています。
ASTERデータは、世界中
から選ぶことができます。
全世界ののLandsat-8データは
最新の雲なし画像をバンドごと・
シーンごとに選ぶことができます
。
日本付近のLandsat-7/8
のデータは、表示範囲で
バンドことにデータをダウ
ンロードできます。
検索期間を設定できます。
雲の量を設定できます。
画像を時系列に見
ることができます。
全世界ののSentinel-2Aデータは
最新の雲なし画像をバンドごと・
シーンごとに選ぶことができます
。
- 8. PDR・屋内測位技術の活用事例とベンチマーキング
杉原エス・イー・アイ(株)
マルティスープ(株)
• 屋内位置情報/フィールド業務支援ソリューション
iField Indoor事業を展開
サイトセンシング(株)
実用化事例 (株)メガチップス
• 省電力PDR指向モーションコプロセッサー
Frizzの製品化
(株)NTTドコモ/ (株)ゼンリンデータコム
• 「ドコモ地図ナビ powered by いつもNAVI」にPDR採用
• 全国の地下街や地下鉄駅構内に対応
• 320箇所(2015.4)から480箇所(2016.9)へエリア拡大
NTTドコモ/ゼンリンデータコム報道発表<2015年2月19日>
「新たな屋内ナビゲーション技術を開発 -スマートフォンの動
きと地図情報を活用した屋内ナビゲーションを実現-」より
PDRベンチマーク標準化委員会
• PDR 自律型行動計測システム
SUC-PDR-Li/SUC-PDR-AA
の開発・製造・販売 • 産総研技術移転ベンチャー
• 省電力型歩行者自律航法システム
(PDR+)事業を展開
(株)フレームワークス
• 物流オープンデータ活用
コンテストで作業員の
動線計測にPDRを活用
PDR Challenge
in Warehouse Picking
歩行だけではなくピッキング作業などのより複雑な動き
を含むセンサデータを3時間以上の連続記録して、
PDR Challengeで活用
物流オープンデータ活用コンテストのスピンオフ企画
IPIN2017で開催予定!
ピッキング手法のデータ同化事前評価
行動計測、行動・環境モデル化、改善案事前評価によって、効率と従業員満足度(ES)が両立
する業務プロセスの効率的な設計が可能に
High:75%以上, Middle:75%未満25%以上 ,Low:25%
未満。青色が多ければ良く、赤色が多ければ悪い。