1. TP.141 GDA : Le GRAFCET
RAPPELS
1. Définition :
Le GRAFCET est un outil graphique permettant de décrire le fonctionnement d'un
système selon une suite de séquences successives.
Rappel de la signification du mot GRAFCET :
GRA :
F:
C:
E:
T:
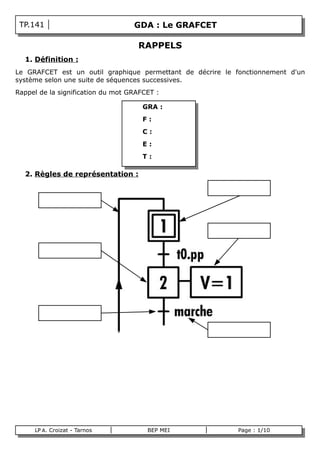
2. Règles de représentation :
LP A. Croizat - Tarnos BEP MEI Page : 1/10
B
2. TP.141 GDA : Le GRAFCET
3. Vocabulaire :
Une étape peut être :
____________ : ____________________________________________________
____________ : ____________________________________________________
Une réceptivité peut être :
____________ : ____________________________________________________
____________ : ____________________________________________________
Une transition peut être :
____________ : ____________________________________________________
____________ : ____________________________________________________
____________ : ____________________________________________________
4. Règles d'évolution :
La situation initiale : _____________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
Franchissement des transitions : ____________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
Activation et désactivation des étapes : ______________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
LP A. Croizat - Tarnos BEP MEI Page : 2/10
B
3. TP.141 GDA : Le GRAFCET
GRAFCET et Notions de « POINTS DE VUE »
Système étudié : Système de perçage d'une pièce.
* Le système doit permettre de percer des pièces métalliques
* L'appui sur un bouton poussoir « marche » par l'opérateur lancera le cycle :
– la pièce sera serrée dans un étau ;
– le perçage pourra alors s'effectuer ;
– Une fois le perçage terminée et la pièce desserrée, l'opérateur pourra retirer et
changer la pièce.
1. Fonction globale :
2. GRAF
CET
point
de
vue
système ou point de vue procédé :
1
2
3
4
LP A. Croizat - Tarnos BEP MEI Page : 3/10
B
4. TP.141 GDA : Le GRAFCET
3. Choix des procédés de production – description de la Partie
Opérative :
* Procédé choisi pour le serrage de la pièce :
- _________________________________
* Procédé choisi pour le perçage de la pièce :
- __________________________________
___________________________________
* Technologie utilisée pour la détection des fins de courses des vérins :
- __________________________________
M : _____________
________________
________________
________________
B : _____________
________________
________________
b0 – b1 : ________
________________
________________
ps : ____________
________________
A : _____________
________________
a0 : ____________________________________________________
LP A. Croizat - Tarnos BEP MEI Page : 4/10
B
5. TP.141 GDA : Le GRAFCET
4. GRAFCET point de vue Partie Opérative :
1
2
3
4
5
5. Détermination de la commande
6. Inventaires Entrées/Sorties de la Partie Commande :
LP A. Croizat - Tarnos BEP MEI Page : 5/10
B
6. TP.141 GDA : Le GRAFCET
Partie
Commande
7. GRAFCET point de vue Partie Commande :
1
2
3
4
5
LP A. Croizat - Tarnos BEP MEI Page : 6/10
B
7. TP.141 GDA : Le GRAFCET
EXERCICE : MARQUAGE DE CARTONS
Fonction globale GRAFCET Point de vue Système
LP A. Croizat - Tarnos BEP MEI Page : 7/10
B
8. TP.141 GDA : Le GRAFCET
TRAVAIL DEMANDE
Quelles sont les technologies de capteurs utilisées ?
Capteurs p0, p1, t0, t1, b0, b1 :
Capteurs pp0, pp1 :
Pour la Partie Opérative, deux technologies sont proposées : des
distributeurs pneumatiques à commandes monostables ou bistables.
Représente chacune d'elles pour la chaîne d'action P :
Commande monostable Commande bistable
A partir du GRAFCET point de vue Partie Opérative, recherche le GRAFCET
point de vue Commande pour les choix techniques suivants :
– Les chaînes d'action P, T et B avec des commandes bistables ;
– Les chaînes d'action P, T et B avec des commandes monostables.
LP A. Croizat - Tarnos BEP MEI Page : 8/10
B
9. TP.141 GDA : Le GRAFCET
GRAFCET point de vue Partie Commande
fonctionnement bistable : fonctionnement monostable :
1 1
2 2
3 3
4 4
5 5
6 6
7 7
8 8
LP A. Croizat - Tarnos BEP MEI Page : 9/10
B
10. TP.141 GDA : Le GRAFCET
Pour chacune des transitions du GRAFCET, surligne en rouge les entrées
validée :
X1 à X2 X2 à X3 X3 à X4 X4 à X5
X6 à X7 X7 à X8 X8 à X1
Pour chacune des transitions du GRAFCET, surligne en rouge les sorties
actives :
X2 X3 X4 X5 X6 X7 X8
LP A. Croizat - Tarnos BEP MEI Page : 10/10
B