
Recomendados
Mais conteúdo relacionado
Mais procurados
Semelhante a Open lab2013パネル原稿集
Semelhante a Open lab2013パネル原稿集 (20)
Mais de openrtm
Mais de openrtm (20)
Open lab2013パネル原稿集
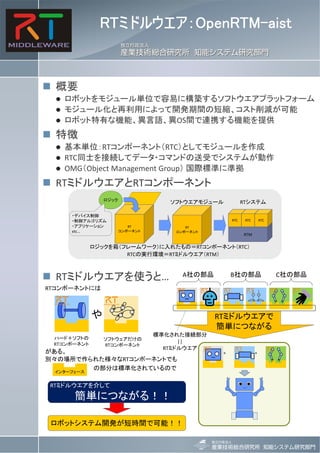
- 1. 概要 ロボットをモジュール単位で容易に構築するソフトウエアプラットフォーム モジュール化と再利用によって開発期間の短縮、コスト削減が可能 ロボット特有な機能、異言語、異OS間で連携する機能を提供 特徴 基本単位:RTコンポーネント(RTC)としてモジュールを作成 RTC同士を接続してデータ・コマンドの送受でシステムが動作 OMG(Object Management Group) 国際標準に準拠 RTミドルウエアとRTコンポーネント ロジック ・デバイス制御 ・制御アルゴリズム ・アプリケーション etc… ソフトウエアモジュール RTシステム RTC RT コンポーネント RT コンポーネント RTC RTC RTM ロジックを箱(フレームワーク)に入れたもの=RTコンポーネント(RTC) RTCの実行環境=RTミドルウエア(RTM) RTミドルウエアを使うと… A社の部品 B社の部品 RTコンポーネントには や ハード+ソフトの RTコンポーネント RTミドルウエアで 簡単につながる ソフトウェアだけの RTコンポーネント 標準化された接続部分 || RTミドルウエア がある。 別々の場所で作られた様々なRTコンポーネントでも の部分は標準化されているので インターフェース RTミドルウエアを介して 簡単につながる!! ロボットシステム開発が短時間で可能!! + + C社の部品
- 2. 言語・OS・ネットワークの壁を超えるRTミドルウエア ロボットC ロボットB ロボットA RTMにより、 ネットワーク上に 分散するRTCを OS・言語の壁を 越えて接続する ことができる。 RTCは 様々な言語で作成可能 様々なOS上で動作 RTC RTC RTM VxWorks ネットワーク RTC RTC RTM FreeBSD アプリケーション RTM ARTLinux uITRON RTM RTC RTC Windows RTM RTC RTC Linux RTM RTC RTC RTC RTC RTC 操作デバイス 既存の資産を活用 RTCは RTC同士の接続 は、プログラム 実行中に動的に 行うことが出来る。 ネットワーク上に分散可能 動的な構成変更が可能 センサ 柔軟なシステム RTミドルウエアの広がり ロボットの普及と産業創出 次世代ロボット 産業基盤創出 研究・イノベーションの促進 次世代ロボット 研究開発基盤 ©株式会社前川製作所・株式会社アールティ © 川田工業 分野間連携と新領域開拓 ロボット技術 応用分野の拡大 ©川田工業株式会社 製品化例 © セグウェイジャパン © ヴイストン株式会社 ©川田工業株式会社 研究用ロボットの応用例 ©新日本電工株式会社 引用:平成18年度科学技術白書 高エネルギー物理分野等の応用例 日本発のロボット用ソフトウエアプラットフォーム ツール ミドルウエア モジュール NEDO RTMプロジェクト*等で開発 NEDO基盤PJ*・知能化PJ等で開発 *NEDO 21世紀ロボットチャレンジプログラム 「ロボット機能発現のために必要な要素技術開発」(2002-2004) カテゴリ *NEDO次世代ロボット共通基盤開発プロジェクト(2003-2007) *NEDO次世代ロボット知能化技術開発プロジェクト(2007-2011) プロジェクト数 ツール 12 作業知能RTC 108 移動知能RTC 92 対話知能RTC 16 商用ライセンスRTC 合計 多数のRTCを Webページ上に集積 5 235 OpenRTM‐aist諸元 OMGRTC Specification 準拠 言語:C++、Java、Python OS:Windows, UNIX, MacOS X, VxWorks, uITRON ツール:RTCBuilder, RTSystemEditor、rtshell NEDO知能化PJ*等で開発 お問い合わせ 独立行政法人 産業技術総合研究所 知能システム研究部門 担当: 安藤 慶昭 e‐mail: n‐ando@aist.go.jp, URL: http://openrtm.org
- 3. 概要 ソフトウエア国際標準化団体 OMG†における国際標準化を推進 多様な実装間の相互運用性実現のため標準化に着手 (2004年~) RTコンポーネントのインターフェースを標準化(2008年) †Object Management Group 特徴 汎用コンポーネントモデルとロボット特有な機能を標準として定める 誰でもミドルウエアを作ることができ、相互運用が可能に OpenRTM‐aistをはじめ、10種類以上の多様な実装が存在 Robotic Technology Component (RTC) Specification pd RTC Packages «profile» RTC • OMG RTC 仕様は3つ のパッケージから構成 される: SDOPackage Execution Semantics Introspection – Lightweight RTC – Execution Semantics – Introspection (from External Models) Lightw eight RTC (from Robotic Technology Components) Execution Semantics Lightweight RTC Introspection RTC SDO Data flow コンポーネント FSM コンポーネント request response Multi Modal ポート ポート 状態マシン ロボット特有の実行形態 コアコンポーネントモデル 状態マシン 動的構成の実現 OMG RTC標準仕様書 OMG RTC仕様準拠のRTミドルウエア実装 名称 OpenRTM-aist OpenRTM.NET RTM on Android H-RTM (仮称) RTC-Lite miniRTC, microRTC RTMSafety RTC CANOpen PALRO OPRoS GostaiRTC ベンダ AIST SEC SEC 本⽥R&D AIST SEC 特徴 SEC/AIST SIT, CiA 富⼠ソフト ETRI GOSTAI, THALES 互換性 C++, Python, Java --- .NET(C#,VB,C++/CLI, F#, etc..) ◎ Android版RTミドルウエア ◎ OpenRTM-aist互換、FSM型コンポーネントをサポート ◎ PIC, dsPIC上の実装 〇(ブリッジ) CAN・ZigBee等を利⽤した組込⽤RTC実装 〇(ブリッジ) 機能安全認証 (IEC61508) capableなRTM実装,商⽤ 〇(ブリッジ) CANOpen-RTCマッピングを定めたCiA 標準 〇(ブリッジ) ⼩型ヒューマノイドのためのC++ PSM 実装 × 韓国国家プロジェクトでの実装 × ロボット⾔語上で動作するC++ PSM実装 ×
- 4. 概要 コマンドラインで個々のRTコンポーネントやRTシステムの制御が可能 RTSystemEditorと同等の機能を持つコマンドセット リソースが少ないコンピュータでも動作可能、スクリプトによる定形処理に威力を発揮 特徴 コマンドラインやシェルスクリプトでRTコンポーネントを接続したりアクティ ベートしたりすることが可能 Windows、Linux、BSD、及びMacOS Xなどで利用可能 RTシステム全体を一つのコマンドで起動、終了することが可能 起動条件や起動順序に従いRTCの起動を行う RTSystemEditorで作られたRtsProfileファイルを利用可能 コマンドラインからrtprintとrtinjectとrtlogでコンポーネントのテストを簡単 に行うことができる コマンドの例 ファイルシステムのナビゲーション rtcwd, rtdel, rtfind, rtls, rtpwd RTCのコネクションを管理する rtcon, rtdis RTCの状態を変更する rtact, rtdeact, rtreset RTCを検査する rtcat, rtprint, rtinject, rtlog RTCのコンフィグレーションを管理する rtconf マネジャーを利用する rtmgr $ rtcwd /localhost/ $ rtls kenroke.host_cxt/ $ rtfind . ‐‐type=c ‐‐iname Out /localhost/kenroke.host_cxt/ConsoleOut0.rtc $ rtcwd kenroke.host_cxt/ $ rtls ‐l Inactive 1/0 0/0 1/0 0/0 ConsoleIn0.rtc Inactive 1/0 1/0 0/0 0/0 ConsoleOut0.rtc $ rtcon ConsoleIn0.rtc:out ConsoleOut0.rtc:in $ rtact ConsoleIn0.rtc $ rtact ConsoleOut0.rtc $ rtls ‐l Active 1/1 0/0 1/1 0/0 ConsoleIn0.rtc Active 1/1 1/1 0/0 0/0 ConsoleOut0.rtc $ rtprint ConsoleIn0.rtc:out [0.026795792] 42 $ rtcat ConsoleOut0.rtc ConsoleOut0.rtc Active Instance name ConsoleOut0 Type name ConsoleOut Version 1.0 +Execution Context 0 +DataInPort: in $ rtmgr manager.mgr create ConfigSample $ rtls ConfigSample0.rtc ConsoleIn0.rtc manager.mgr/ ConsoleOut0.rtc
- 5. 概要 従来のRTコンポーネント開発環境をWebブラウザ上に実現し、開発環境のクラウド化 RTコンポーネントの実装を行う計算機環境に依存することなく継続的な開発が可能 RTコンポーネント、RTシステムの集中管理を開発者、ユーザ間の共有が可能 特徴 Webブラウザのみを用いたゼロインストールRTコンポーネント開発 簡易バージョン管理機能とリモートコンパイル機能を持ったRTコンポーネントビルダ HTML5を用いたインタラクティブなRTシステムエディタ RTコンポーネントビルダ on the Web 従来のRTCビルダをPHPを用いてサーバー上に実装 サーバー上のコンパイラを利用したリモートコンパイル機能 開発履歴の管理とユーザ間の共有機能 RTシステムエディタ on the Web 従来のオンラインRTシステムエディタをHTML5を用いて実装 同一セグメントのRTCを一括して操作可能 RTC間の接続を容易にするコネクション マネージャー Official Site: http://openrtp.org/
- 6. 研究のポイント ●ミドルウエア、開発ツール、コンポーネントのロボットソフトウエア開発基盤 ●ロボットの機能別にオープンソース知能モジュールとシステム例をパッケージ化 ●次世代ロボットの研究開発における低コスト化と開発期間の短縮化に期待 研究のねらい ROBOSSAは、知能ロボットのソフトウェア開発を効率よく実施するための開発プラットフォーム です。知能ロボットに必要な様々な機能をRTコンポーネントと呼ばれるソフトウェアモジュール 化するためのミドルウエア、開発ツール群および、次世代ロボットの基本的な機能の知能モ ジュール群とそのシステム例をオープンソースにて提供することで、次世代知能ロボットの研 究開発基盤を簡便かつ低コストでの実現と、新技術への早期取り組みが可能な開発プラット フォームを目指しています。 研究内容 ROBOSSAは、RTミドルウェア(OpenRTM-aist)とその開発ツール(OpenRTP-aist)、オープンソースライ センスによる「作業知能」、「移動知能」、「コミュニケーション知能」の各知能モジュール群(OpenRTCaist)の総称です。 OpenRTM-aist: 分散オブジェクト指向に基づくモジュール型ソフトウェア開発環境とその実行環境。 OpenRTP-aist: RTコンポーネントの開発ツール群、ロボットアプリケーション開発におけるロボット動 作の生成するツールおよび動作検証のためのシミュレータ等の開発ツール群 OpenRTC-aist: 次世代ロボットの基本的な機能である「作業 知能」、「移動知能」、「コミュニケーション知 能」のRTコンポーネント群およびそれらの知 能モジュールと市販ロボットを使った基本シ ステム例。 このシステム構成に独自サービスや新規機 能を付加することで次世代ロボットの応用基 盤を容易に作成することが可能。 連携可能な技術 ●ミドルウェア (OpenRTM‐aist) • OpenRTM‐aist‐1.1 : http://openrtm.org/ ●開発ツール (OpenRTP‐aist) • RTCBuilder, RTSystemEditor, rtshell : http://openrtm.org/ • OpenHRP3 (動力学シミュレータ) : http://openrtp.jp/openhrp3/ • Choreonoid(動作パターン設計) : http://choreonoid.org/ ●知能コンポーネント群 (OpenRTC‐aist) • OpenVGR (作業知能、物体認識) : http://http://code.google.com/p/openvgr/ • graspPlugin for Choreonoid (作業知能、把持計画) : http://choreonoid.org/GraspPlugin/ • OpenNavigarion (移動知能) : http://openrtc.org/Mobile/index.html • OpenHRI (コミュニケーション知能) : http://openhri.net, http://openrtc.org/OpenHRI/index.html 謝辞: 本研究の一部は新エネルギー・産業技術総合開発機構(NEDO)の「次世代ロボット知能化技術開発プロジェクト」により行われたものです。
- 7. 概要 音声認識、音声合成、対話制御などのロボットのコミュニケーション 機能をコンポーネ ント化 知能化PJで開発された有償コンポーネントと置き換え可能 KINETCなどの最新の入力機器に対応した機能拡張と保守を継続 特徴 オープンソースソフトウェアによる音声対話機能のコンポーネント群 音声認識、音声合成コンポーネント群は、知能化PJの共通インターフェースに準拠 KINECTセンサを用いたジェスチャ認識などマルチモーダル対話機能コンポーネント OpenHRIで提供するコンポーネント Official Site: http://openrtc.org/OpenHRI/ OpenHRIAudioパッケージ • マイクから音声信号を取得、環境の雑音除去、音源方向の同定など音響信号処 理などのコンポーネント群 OpenHRIVoiceパッケージ • 音声認識や音声合成に関する機能のコンポーネント群 • Julius, OpenJTalk, Festivalを簡単に利用することができる SEATSATパッケージ • 状態遷移型音声対話処理のコンポーネント群 マルチモーダル入力機器のコンポーネント • KINECTセンサを用いたマイクロホンアレイ入力とジェスチャ認識 OpenHRIを用いたロボットシステム構成例
- 8. RTM on Android 〜Android対応RTミドルウェア〜 株式会社セック 概要 RTM on Androidは、Android OSに対応したRTミドルウェアです。 RTM on Android を用いることで、ロボットやセンサがAndroid端末と連携するシステムを 迅速かつ安価に作成することが可能になります。 特徴 Android OSに対応したRTミドルウェア実装 -Android上でRTコンポーネントを開発することができます。 -コンポーネント指向開発によりシステムの保守性、再利用性、拡張性が向上します。 OMGの国際標準規格であるRTC Specificationに準拠 -OpenRTM‐aist‐1.0と連携することが可能です。 -RTミドルウェアを使用した既存ロボット/センサが利用できるため、開発コストを 下げ、開発期間を短くすることができます。 RTM on Androidの活用事例 SCENE1: ロボットの遠隔制御・監視 Android端末を⽤いてロボットを遠隔制御 タブレットからロボットを操作 ロボットのカメラ映像をタブレットで表⽰ SCENE2: センサーネットワーク Android端末をセンサネットワークのデバイスとして 活⽤ 部屋情報をセンサーと接続したAndroid端末から 収集 収集結果をタブレットに表⽰ インフォメーション ロボット カメラ映像 人のセンシング結果 ロボットの 首振りを制御 コントローラとして利用 RT-ADK (センサー) 部屋ごとの温度、照度 センサーの情報を収集 RT-ADK (センサー) 情報表示端末として利用 ※RTM on Androidは、独⽴⾏政法⼈新エネルギー・産業技術総合開発機構(NEDO)の委託事業「次世代ロボット 知能化技術開発プロジェクト」のもとで開発した成果を活⽤しています。
- 9. RTMSafety 〜機能安全対応RTミドルウェア〜 株式会社セック 概要 RTMSafetyは機能安全の国際規格IEC 61508に準拠したロボットの安全関連系のための ミドルウェアです。 安全規格に準拠したロボットを短期間、低コストで開発することができます。 特徴 コンポーネントの生存監視機能、エラー ハンドリングの機構、自己診断機能をはじめ とする安全なソフトウェアを開発するための 機能を安全機能ライブラリとして提供します。 国際標準規格であるRTC Specification 1.0に 準拠しています。 リアルタイム制御が必要なロボットアプリ ケーションを開発するためのフレームワーク を提供します。 RTMSafety Bridgeを利用することで、既存 資産のOpenRTM‐aist互換RTコンポーネント と連携することが可能です。 適用事例 RTMSafetyのシステム構成 RTMSafetyは、ロボット介護機器など日常活躍するロボットたちを安全に動かすための 共通基盤モジュールとして活用されます。 CPUボードとRTMSafetyをパッケージ化し、機能安全に対応した共通基盤モジュールを 開発しています。 イラスト出展:ロボット介護機器開発・導⼊促進事業(基準策定・評価事業) 研究基本計画(経済産業省) 介護従事者の負担を軽減できる 安⼼・安全なロボット介護機器を ⼿軽に利⽤できるように 利⽤者のニーズにあった多種多様な ロボット介護機器を実現できるように ※「RTMSafety」は、独⽴⾏政法⼈新エネルギー・産業技術総合開発機構(NEDO)の委託事業「次世代ロボット 知能化技術開発プロジェクト」のもとで、独⽴⾏政法⼈産業技術総合研究所と共同研究した成果を活⽤しています。 ※「機能安全に対応したCPUモジュール」は、経済産業省の委託事業 「ロボット介護機器開発・導⼊促進事業(基準策定・評価事業)」のもとで開発中です。
- 10. HIROを用いたペットボトル把持 玉川大学 岡田浩之研究室 株式会社アドイン研究所 概要 RoboCup@Homeのような日常生活におけるロボットの活用を目標として構築しました。 HIROにKinect及びハンドを装着し、ペットボトル検出と把持をおこなう RTコンポーネントです。 特徴 OpenCVの物体検出ライブラリを使用したペットボトルの検出 Kinectからの座標とHIROのIK機能を用いたペットボトルの把持 ペットボトルの把持向けに専用ハンドを製作 HIRO制御RTコンポーネント接続図 ペットボトル検出とHIRO動作手順詳細 ペットボトル検出(RtcObjectDetector) OpenCVライブラリ(Haar-like特徴、Adaboost検出器)を使用 ペットボトルの検出部位は特徴的な先端部分にて検出 学習には以下の枚数の画像を使用 ・ポジティブ画像:5710枚 ・ネガティブ画像:9614枚 HIRO動作手順(RtcHiroGripper) ①HIROと接続、初期化 ②待機姿勢へ動作 ③首の動作 ④ペットボトル座標読み込み ⑤アームの動作 ⑥ハンドの動作(把持) ⑦アームの動作(持ち上げ) HIRO全体写真(右図) ペットボトル把持のハンド(下図) ネガティブ画像例 ポジティブ画像例 これに加え、フィルタリングにより検出率を上げる ■認識枠によるフィルタリング 認識枠の高さが閾値より小さいもののみ出力 ■距離によるフィルタリング 対象物の距離が閾値より近いもののみ出力
- 11. 概要 高信頼なロボットを開発するモデルベース開発環境 状態遷移表で設計の抜け漏れを予防 シミュレータで振る舞いの妥当性を検証 RTミドルウェアで振る舞いを部品化して開発効率アップ LEGO NXT 「お薬ロボ」 テレプレゼンスロボット 環境 センサー バンパー (非常停止) センサー 障害物 センサー 環境情報 管理 走行センサー 管理 障害物 管理 安全走行 管理 ウィンク 制御 両目 サーボ モニター 制御 通信管理 モニター サーボ 走行 制御 車輪 モーター ・NTTデータ様のテレプレゼンスロボットの開発に採用 ・薬を正しく飲むことを支援するサービスロボット ・安全走行管理コンポーネントの設計に利用 ・サービス設計者が日本語の状態遷移表で記述、メンテナンス ・操作コマンドと障害物情報の調停を管理 ・メカ部は LEGO NXT で実装 Beauto Rover RTC 教材 電動車椅子ロボット ・ヴィストン社の 「ビュートローバーRTC」 での利用例 ・産業技術総合研究所様の電動車椅子ロボットに採用 ・RTC が動作するPCからBluetooth / ZigBee経由で制御 ・安全モニターコンポーネントの設計と検証に採用 ・操作コマンドと障害物情報の調停を管理 ・右図は走行ログから生成した設計カバレッジのエビデンス ・Python(スクリプト言語) で手軽に UI を構築 「ZIPC-RT」 と OpenRTM の連携動作の原理 ①RTCBuilder が生成した onExecute関数から ZIPCが生成した事象解析関数を呼び出します。 ②生成コードには ZIPCとの通信コードが含まれ状態遷移のログ生成やセルカバレッジ取得可能です。 http://www.zipc.com/special/zipc_rt/ ・本資料の内容は予告なしに変更する場合があります。 ・本資料に記載された社名、製品名は各社の商標または登録商標です。
- 12. TOPPERS (Toyohashi OPen Platform for Embedded Real‐time Systems) 組込みシステム分野にて、広く使われるオープンソースOSの構築を目標 主な成果物 TOPPRES / ASPカーネル μITRON4.0仕様のスタンダードプロファルに準拠したリアルタイムカーネル TECS 主な利用事例 TECS (TOPPERS Embedded Component System) コンポーネント図 組込みシステムに適したコンポーネントシステム 開発の流れ 大規模組込みソフトウェアの見通しを改善 組込み向きの分散フレームワークを実現 コンポーネント間の静的結合によるオーバヘッド削減 シグニチャ記述 セルタイプ記述 組上げ記述 コンポーネント記述 コンポーネントモデル ジェネレータ 編集 テンプレート ヘッダ 生成コード インタフェース コンパイラ リンカ RTMとTECSの連携 アプリ 連携することで知能化空間で利用可能 RTM ↔ TECS RTM ← TECS Ethernet Serial サーバ クライアント サーバ マーシャラ アン マーシャラ マーシャラ TDR 通信機構 RTM → TECS 通信機構 クライアント ス タ ブ RTC TECS コンポーネント TDR Zigbee Library Zigbee Library アン マーシャラ 通信機構 通信機構 RTM ← TECS Zigbee
- 13. 2012.10
- 14. 分散データ収集システムの構築が容易に !! ■高い柔軟性の実現 ■開発容易性の実現 ●コンポーネントを組み合わせてデータ収 集システムを構築 ●コンポーネント間の連携が容易 ●XMLによるシステム構成 ●Webブラウザによるラン制御 ●基盤フレームワークはRTコンポーネント※を使用 コマンド/ステー タスポート ※ロボット制御の国際標準規格。産業技術総合研究所による実装OpenRTM-aistを利用 ●コンポーネントのタイプ別にスケルトンコードを生成 ●既存のコンポーネントをより簡単に再利用 XML UI用PC システム構成ファイ ル READOUT コントローラ HTTP Server XML/JSON Data READOUT データ入 力ポート ロジッ ク 機器パラメータ/ 解析パラメータファ イル データ出 力ポート Network コンポーネントの構造 コンポーネントの位置透過性 コマンド/ ステータス Webブラウザから ランコントロール コマンド/ ステータス DAQ用PC ・ ・ ・ Webブラウザで オンラインモニタ READOUT Development Reuse READOUT 検出器 User A READOUT Repository READOUT A/D変換デバイ ス 構成例 User B ソフトウェア再利用 柔軟なシステム構築 ROOTを使った オンラインモニタ J-PARC 物質・生命科学実験施設(MLF)で実験データ収集に使用中 J-PARC MLFで使用されている コンポーネント シンチ検出器 Gatherer for PSD Gatenet Gatherer/Gateboard for Scinti DAQ‐Middleware Working GEM検出器 Gatherer for GEM Monitor PSD検出器 MLF中性子実験装置 Monitor Monitor 共 通 DaqOperator Dispatcher Logger 資料提供 JAEA/KEK J‐PARCセンター J-PARC(大強度陽子加速器施設) DAQ Operator DAQ Operator Monitor Gatherer for PSD Monitor Dispatcher Gatenet J‐PARCは世界最高クラスの大強度陽子 ビームを生成する加速器とその大強度陽 子ビームを利用する実験施設で構成され る最先端科学の研究施設です。 Gatherer/ Gateboard for Scinti Logger BL01, 12, 14, 20, 21 Dispatcher BL03, 19 Logger 物質・生命科学実験施設(MLF)では、世界最高 強度のミュオン及び中性子ビームを発生させ、 物質科学/生命科学研究を推進させることを目 的としています。 現在、DAQ‐Middlewareは中性子実験装置14箇 所で使用中です。 ※ DAQ-Middlewareは、OpenItのひとつのプロジェクトとして開発を行っています DAQ Operator 開発チーム 千代浩司、井上栄二(高エネルギー加速器研究機構) 神徳徹雄、安藤慶昭(産業技術総合研究所) 長坂康史(広島工業大学) 味村周平(大阪大学) 和田正樹(株式会社Bee Beans Technologies) URLs DAQ‐Middlewareホームページ: http://daqmw.kek.jp/ OpenItホームページ: http://openit.kek.jp/ Monitor Dispatcher BL21 Logger 各実験装置でのコンポーネント使用例
- 15. 概要 複数人物が存在する環境下においても走行が可能な人物追従ロボットシステム 人間追従動作を活用した移動ロボットのナビゲーション 人間追従のRTコンポーネント化 → 地図学習・ナビゲーションシステムとの容易な統合 特徴 人間の生活環境における安定した人間追従動作の実現 ロボットによる人間追従動作 → 人間の動きの観測結果を移動ロボットの走行に生かす 人間の動作に基づいて走行可能領域や環境の形状、地図などを学習させる 人物追従システムのRTコンポーネント Kinectによる人物検出 移動ロボットの人物追従 LRFによる人物検出 + パーティクルフィルタによる 人物追跡 パンユニットによる Kinectの視野拡大 移動ロボットナビゲーションへの適用例 人物追従 システム 地図生成 システム ハイブリッド環境地図を利用した移動ロボットナビゲーションシステム 重要点の 地図生成 追従時の方向転換や 停止など、人物の 特徴的動作の検出 ナビゲーション システム • 人を追従しながら、走行環境中の意味のある重要点 を検出し環境地図を自動生成 • 生成した環境地図に基づくナビゲーション → 子どもが親のあとをついていきながら環境を学習し ていくように、人とともに行動することで、自律走行が可 能になる移動ロボットシステムを目指している
- 16. Raspberry Pi用入出力拡張ボードの紹介 有限会社 ウィン電子工業 概要 未来のプログラマのために開発した超低価格で名刺サイズのパソコン(Raspberry Pi)に接続する 入出力拡張ボードを、独立行政法人産業技術総合研究所と共同開発。 ねらい 簡易にセンサーやアクチュエータを接続する事を可能にする。 ハードウェアを製作する時間を短縮でき、プログラム開発、講習の効率化を行える。 手頃な機器を利用したシステム例を紹介する事で、RTミドルウエアへの参入を容易にする。 特徴 Raspberry Piの汎用入力出力(GPIO)コネクタに、そのまま接続可能。 Raspberry Piと同サイズ、または小型な為、設置スペースを節約。 多用なインターフェース、センサを活用出来る。 製品 ○PiRT-Unit IO拡張ボード ○ SPI-CAN変換ボード ○ RasPiExtBoard A/D×4CH、D/A×2CH、 I²C、PWM、 CAN×2CH 3軸ジャイロセンサ、3軸地磁気+加速度センサ、 RS-232C or XBeeの選択式 デイジーチェーン接続可能 大気圧センサ、湿度+温度センサ アーキテクチャ PiRT‐Unit SPI‐CAN RS‐232C RasPiExtBoard D/Aコンバータ 地磁気センサ 湿度センサ + XBee I2C PWM A/Dコンバータ Raspberry Pi CAN UART_TxD I2C_SDA UART_RxD I2C_SDL ジャイロセンサ PWM 加速度センサ SPI_MOSI GPIO 23(CLK) SPI_MISO GPIO 24(DATA) SPI_SCLK SPI_CE0 SPI_CE1 有限会社 ウィン電子工業 + 大気圧センサ 温度センサ
- 17. 概要 FPGA上で動作するCORBA実装(ORBエンジン) RTミドルウェアにおける通信の基本となっている分散オブジェクト標準規格CORBAに準拠 FPGAをマイコン・PC・タブレット等のアプリケーションと連携する際に最適 特徴 オブジェクト指向インターフェイスでJava/Python/C++等の言語からFPGAを操作可能 Javaからのハードウェア合成により低遅延(UDP/IPパケットの入出力:200μ秒) FPGA上の任意の回路を接続可能(JavaRockのHDLインターフェイスを使用) ORBエンジンの性能・JavaRockによる回路記述例 1000 Delay [us] 800 ORB (PC) ORB (FPGA) Raw (PC) Raw (FPGA) Raw:生データ 手動で作った 1回8バイト転送 制御プロトコル 600 400 200 0 1 ORBエンジンは、FPGA上に作成したセンサ等の独自回路 にオブジェクト指向のインターフェイスを付与します。 (CORBA準拠で、Java/Python/C++などから呼出し可能) 1. import net.wasamon.javarock.rt.*; 2. 3. @javarockhdl 4. public class Timer { 5. int counter = 0; 6. 7. @auto 8. public void run() { 9. while(true) { 10. counter++; 11. } 12. } 13. 14. public int getCounter() { 15. return counter; 16. } 17. public void resetCounter() { 18. counter = 0; 19. } 20. } ORB:オブジェクト 指向呼出し プロトコル (50‐200バイト) 2 3 Remote Calls 4 @autoと記載した メソッドは 自動並列実行 通常のJavaスタイル の記述が可能 5 遠隔呼び出しのUDP/IPパケットが、 FPGAに入ってから出るまでの呼出 し応答時間測定結果です。(0.2ms) Javaによるタイマー回路の 記述例です。JavaRockで回路 (HDL)を合成できます。 適用事例:FPGA倒立振子ロボットの開発 センサ入力 平均化処理 Whole Control Flow Control kernel Start Sensor value input Gyro sensor value average Start Control loop 8.3ms (120Hz) 46% Z value controll <1% Z calibration 7% Loop Encoder average 21% Sync Output calc 17% Initialize 制御周期 8.3ms Processing Time 6.9ms (worst) Kernel Overflow check 2% Irregular detection End ① VStone社倒立振子キット(Beauto Balancer) に付属のC言語ソースコードの処理を分析し、 制御周期120Hz(8.3ms),センサ値平均化の処 理時間が大部分を占めることが分かりました。 Remote PC Gyro Sensor & ADC H/L=0V/3.3V Phase A CORBA protocol Control Logic UDP TX UDP RX 100 BaseTX Phase B UDP RX UDP TX リモートホスト Time Voltage 0-3.3V Converted to 12bit value Remote Controller ② IDL(Interface Definition Language)で、倒 立振子システムの操作に必要なメソッドを 定義しました。 Sensor Board FPGA board Gyro& Average long setPwmOutput(in short activePeriod, in boolean direction, out short gyroValue, out short encValue); }; ↑制御のメソッド 7% 処理時間 6.9ms Java IDL long setPwmPrescaler(in short prescaler); ←PWM周期設定のメソッド long setPwmPeriod(in short period); <1% PWM output interface InvertedPendulum { long setSyncPeriod(in short period); ←制御周期設定のメソッド Client @PC Packet creation FPGA(サーバオブジェクト) Server Object @FPGA UDP Packet PWM output Get sensor values UDP Packet Motor output Calculation Packet creation Timer Direction Protocol Processing By ORB Engine Motor Driver Gyro モータ出力 タイマ Calc Read out sensor value (Phase A/B) and calculate angle Read out sensor value (8 times) and make average Motor output Packet analysis センサ 演算 Encoder PWM Timer Set PWM Active period Drive Motor always Count-up Always For sync Use the Calculated/ Averaged sensor values (Synchronization) ORBE server PWM signal センサ time Sync Packet analysis Rotary Encoder Encoder& Average Controller ③ 倒立振子キットのマイコン ボードをFPGAボードに載せ替え ました。 Sync Packet creation Set PWM Active period I/O manipulation On FPGA UDP Packet Packet analysis ④ FPGAはセンサ・モータ入出力、制御演算 ⑤ UDPパケットにCORBAのメッセージを載せ、 をリモートPCが行う分散システムをJavaRock ORBエンジンによる低遅延での遠隔メソッド呼出 & ORBエンジンを用いて設計実装しました。 しで制御パラメータを調整し倒立制御しました。 Sync ⑥ FPGAのみでも自立制御に成功し ました。センサ毎に並列処理すること で処理時間に十分な余裕があります。
- 18. 中央大学大学院 古川優、松井芳樹、國井康晴 概要 大規模複雑化するシステム開発を効率化し, 遠隔地からの管理運用を可能にする 3層構造型システムアーキテクチャにより, 管理運用を柔軟化 特徴 ユーザビリティを考慮し, 柔軟な動作ロジックを仮想接続にて構築可能(Logic Layer) タスク制御コンポーネントであるDatabaseNodeModule(DNM)を用いて, 実接続における データ透過性の確保や効率的なモジュール管理を実現(Connection Layer) ハードウェア接続のネットワーク化により, 物理的制限なしに変更が可能(Physical Layer) システムアーキテクチャ Logic Layer(仮想接続層) • モジュールの動作ロジック(タスク)を柔軟に構築し, 自由にそれらの切り替えが可能 あらゆる状況への柔軟な対応・操作のためのユーザビリティ Connection Layer(実接続層) • モジュールの実際の振る舞いをDNMによって管理 • 共有メモリ機能を搭載し, 高速な通信が可能 • クラスタリングによる最適なマッピングを行う 効率的なモジュール管理・データ透過性の確保 Physical Layer(物理層) • ハードウェアをネットワークを介して接続し 直接任意の機能にアクセス可能 • 物理的制限なしに接続を変更できる 最低限の通信でのシステム変更の実現 • テレオペレーションとマルチCPU化 テレオペレーション機能 • ロボット側システムとオペレータ側システムを通 信専用モジュールで接続 • 外部ネットワークを介して遠隔地からの制御を実 現 • 通信状態の監視 • 通信の透過性の確保 • システム同士の独立性 の確保 マルチCPU機能 • DNMを各PCに配置し、ローカルネットワーク内で1 つの階層構造を構築 • 複数のPCに配置されたモジュール群を1つのシス テムとして運用 遠隔ロボットへの施用 本アーキテクチャにより構築されたシステムをMicro6に実装 Teleoperation用の通信, 状態監視ツールを開発 惑星探査ローバ Micro6 中央大学大学院理工学研究所 • 負荷の分散 • トラブル時のバックアップ
- 19. 概要 ヨウ化セシウム(CsI(Tl))シンチレーション方式を用いた放射線,放射能濃度測定器 食品,土壌,森林などにおける核種毎の放射能濃度と空間放射線量の測定が可能 公共施設や各市町村の住民が手軽に使用でき,安全安心の確保への寄与を目指す 特徴 国産CsI大型結晶(約46cc)を使用し,高感度・高分解能を実現 ハンディタイプ,小型・軽量化を実現 RTミドルウェアを採用し,各種応用アプリケーションへの対応が可能なシステムを実現 低コスト化を実現 H‐SRBC本体 ヨウ化セシウム結晶各サイズ 測定画面 従来技術との違い 1台で放射線量(μSv/hr)と放射能濃度(Bq/kg)の測定が可能 大型ヨウ化セシウム結晶(CsI)と鉛遮蔽構造の適正化により,ハンディな小型・軽量化を 実現 システム最適化設計手法SDSI‐Cubicを利用した最適設計を実施 4CsI×4フォトダイオード方式により,高感度・高分解能を実現(特願2013‐037315「計測装 置」) r eq [Pa ck a g e] H- SBC [要 求 図] H -S BC <<requirement >> 放 射 線計 測 i bd [Pa ck a g e] H-SBC [H-S BC 制御 用PC ] no t es 放射線を正確に,早く,安く 計測できること : 測定値取得 <<requirement>> 使 用用 途 <<requirement >> 正確 な 状況 把 握 : ビューア <<flowPort>> :コマンド <<flowPort>> :コマンド n ot e s 自家菜園や給食の簡便な 放射能(ベクレル値)を計 測ができること no t es 空間放射線量を正確に 計測できること <<flowPort>> IN :コンフィギュレーション情報 <<flowPort>> :コンフィギュレーション情報 <<flowPort>> OUT :コンフィギュレーション情報 <<flowPort>> 測定値取得 :コンフィギュレーション情報 <<deriveReqt >> <<deriveReqt>> <<deriveReqt>> <<requirement>> γ 線検 出 効率 向上 <<requirement>> 正確 な計 測 n ot es 測定分解能の高い結晶を 使用すること <<requirement>> 安 全 基準 クリ アの 確 認 not es 人体に影響の大きいガンマ線 の検出効率を向上させること no t es 過去に計測した試料の影響を 受けないこと <<sat isfy>> <<deriveReqt>> not es 測定結果を他人が容易に確認 できないようにすること <<deriveReqt>> <<requirement>> ガ ン マ線 エネ ル ギー 測 定範 囲 <<flowPort>> RawData :測定結果 no t es 屋外(田んぼの近くなど)で 使用できるようにすること <<flowPort>> :コマンド <<deriveReqt>> <<requirement... 重量 no t es 5k g以下であること <<deriveReqt>> <<requirement>> シン チレ ー タの 大き さ no t es CsIインゴットの径をなるべく 大きくすること 下限135mm~上限170mm <<requirement>> バ ッテ リ駆 動 n ot es バッテリを使用して6時間 以上駆動可能なこと : 放射能算出 <<flowPort>> 放射能 :スペクトル <<flowPort>> 放射線 :スペクトル <<flowPort>> IN :コンフィギュレーション情報 <<flowPort>> :スペクトル <<flowPort>> OUT :コンフィギュレーション情報 <<deriveReqt>> <<requirement>> 鉛厚 さ not es シンチレータの大きさをなるべく 小さくすること □2.5cmラH2cmが目標 <<flowPort>> :放射能 <<flowPort>> keV600 :スペクトル <<flowPort>> keV600 :スペクトル <<flowPort>> keV662 :スペクトル <<flowPort>> keV662 :スペクトル <<requirement... 直材費 <<deriveReqt>> <<requirement >> B G放 射 線の 遮 蔽 <<flowPort>> 放射能算出 :コンフィギュレーション情報 <<flowPort>> :放射能 not es シールド容器の鉛の厚さをな るべく薄くすること <<deriveReqt>> <<deriveReqt >> <<deriveReqt>> <<deriveReqt>> <<requirement>> 分解 能向 上 <<flowPort>> :ステータス情報 <<flowPort>> :測定結果 <<flowPort>> :測定値 <<deriveReqt >> <<requirement>> 小型化 n ot e s 直径8cmラ高さ12cm(600cc) 以下の大きさとすること <<deriveReqt>> <<requirement >> 結 晶径 <<requirement>> 核種 分 類精 度 no t es 3%以内でセシウム137の線量を測定でき ること not es 0.5~3MeVの範囲を計測でき ること <<sat isfy>> <<block >> ヨウ化 セシ ウム <<flowPort>> :ステータス情報 <<requirement >> 使用 環 境 <<deriveReqt >> <<requirement>> 価格 not es 簡易Viewer込みで15万円(100台)~ 10万円(1万台)以下であること n ot es 測定したデータを外部に保 存できること <<deriveReqt>> <<deriveReqt>> no t es 装置本体のサンプルを入れ る部分に試料を直接触れさ せないこと <<deriveReqt >> : H-SBC本体 n ot e s 一般の家庭の主婦が容 易に使用できること <<requirement>> 測 定デ ータ 保 存 n ot e s 25Bq/k gの放射能を測定で きること n ot e s ガンマ線の核種を同定でき ること <<requirement >> サ ン プル 保持 方 法 <<flowPort>> :測定値 <<requirement... ユーザ <<deriveReqt>> <<deriveReqt >> <<requirement>> 放射 能 感度 <<deriveReqt>> <<requirement>> 核種 の同 定 <<deriveReqt>> <<deriveReqt>> <<requirement>> プ ライ バ シー 保護 n ot e s 過去からの放射能,放射線量を時 系列で比較できること <<deriveReqt>> no t es 半減期が長い(約30年)セシウム 137の量を測定できること <<requirement >> 試 料間 の 影響 の 排除 not es 空間放射線量:0.003マイク ロSv/h〜30マイクロSv/hを 計測できること <<deriveReqt >> <<deriveReqt >> <<deriveReqt>> <<requirement>> 放 射線 量測 定 範囲 <<requirement>> 時系 列比 較 n ot e s 国が定めた安全基準(土: 100Bg /kb,米:50Bq/kg )以下の放 射能を測定できること <<deriveReqt >> <<requirement >> 半減 期の 長 い物 質 の測 定 <<deriveReqt>> <<deriveReqt>> <<deriveReqt >> not es 直材費を全体価格の半 分以下に抑えること <<requirement... ピー ク 分離 <<satisfy>> no t es バックグラウンド放射線を 90%以上遮蔽すること n ot e s 装置全体としての分解能 を向上させること <<block>> サ ンプ ル 装填 容 器 <<deriveReqt>> <<block>> H- S BC - 感度 : 感度(CPM) <<deriveReqt >> <<satisfy>> <<block>> シン チ レー タ n ot e s 10min以内に測定できること n ot e s 使用する結晶毎の特性の違い を補正できること parts <<flowPort>> IN :コンフィギュレーション情報 コスト エネルギー分解能 : エネルギー分解能 p a :rコスト ck a g e] H-S BC [感度(C PM)] [Pa <<requirement>> 測 定時 間 <<requirement>> 結 晶固 体 特性 の 補正 : 放射線算出 不感時間補正係数 :double = 0.000123 <<sat isfy>> <<deriveReqt>> not es 周辺環境および装置内部 の温度が変化しても,計測 値に影響を与えないように すること <<flowPort>> :コマンド <<s atis fy>> not es ピーク分離可能なカウント 数を稼げること n ot e s 測定分解能の高い結晶を 使用すること n ot e s 外部からのノイズの影響を 低減すること <<requirement>> 温 度変 化 への 対応 <<satisfy>> <<requirement>> カ ウン ト数 <<deriveReqt>> <<requirement>> 結晶 の 分解 能向 上 <<requirement>> ノイ ズ の影 響低 減 <<flowPort>> keV800 :スペクト ル <<flowPort>> keV800 :スペクトル n ot e s セシウム137のピーク値 を正確に分離できる事 <<deriveReqt >> b d d [Pa c k a g e ] H- S BC [H- S BC ブロ ック定義 図 ] <<deriveReqt>> <<flowPort>> :放射線 <<flowPort>> :放射線 <<block >> バ ッテ リ <<flowPort>> :スペクトル <<block>> 測 定値 取得 <<block>> 計測部 <<block>> BGシ ー ルド 容器 p a r ts 計測部コスト : 計測部コスト 計測部パッケージングコスト : 計測部パッケージングコスト <<deriveReqt>> - 不感時間補正係数 :double = 0.0 H-SBC IPアドレス :string = 127.0.0.1 H-SBC ポート番号 :long = 12000 ステータスチェック周期 :int = 1 - 全体cpm-Bq変換式傾き :double = 0.00928 137Cs@662ガウス半値全幅 :double = 98.3 137Cs@662検出効率 :double = 1.0 137Cscpm-Bq変換式傾き :double = 0.0272 137Cs@662ピーク検出閾値 :int = 5 134Cs@600ガウス半値全幅 :double = 119.3 134Cs@600検出効率 :double = 1.6 134Cs@600ピーク検出閾値 :int = 5 134Cs@800ガウス半値全幅 :double = 67.9 134Cs@800検出効率 :double = 0.5 134Cs@800ピーク検出閾値 :int = 3 134Cscpm-Bq変換式傾き :double = 0.0104 フィッティング最大試行回数 :int = 100000 フィッティング許容誤差 :double = 0.000000000001 : カウント数 <<flowPort>> 推定結果 :測定結果 <<flowPort>> 放射線推定結果 :測定結果 : CsI線吸収係数 <<flowPort>> OUT :コンフィギュレーション情報 <<flowPort>> 放射線算出 :コンフィギュレーション情報 <<requirement>> 振動 の 遮断 <<block>> 表示 部 n ot e s 外部からの振動の影響を 低減すること <<block>> BG シー ルド 容器 <<block>> 放 射能 算出 p a rt s 表示部コスト : 表示部コスト p a rt s BGシールド容器厚さ : BGシールド容器厚さ BGシールド容器コスト : BGシールド容器コスト BGシード容器重さ : BGシールド容器重さ <<block>> BG シー ルド 用 中ブタ <<block>> バ ッテリ <<block>> 屋外 測定 用 遮蔽 装 置 : カウント数 : カウント数 p a rt s : 結晶幅 : CsI密度 : CsI線吸収係数 : 結晶厚み - : 感度(CPM) <<block>> 計 測装 置ケ ース <<block>> 反射材 p a rt s 計測装置ケースコスト : 計測装置ケースコスト <<block>> 光 検 出デ バイス p a rt s 放射線検知部コスト : 放射線検知部コスト 放射線検知部パッケージングコスト : 放射線検知部パッケージングコスト : 結晶厚み : 結晶厚み : 感度(CPM) : 絶対効率 : 効率 : 効率 : 効率 : 幾何学的効率 1..* : 放出比 <<block>> US Bポ ート <<block>> ACア ダプタ <<block>> 信 号処 理 基板 : 幾何学的効率 : 幾何学的効率 p ar ts 信号処理部コスト : 信号処理部コスト <<block>> 処理 基板 <<block>> バ ッファ ア ン プ : 線源強度(Bq/sec) : 感度(CPM) : 放出比 <<block>> 信 号処 理部 <<block>> A/ D変 換 回路 <<block>> プ リア ン プ <<block>> メ イン アン プ : 絶対効率 <<block>> 放射 線検 知 部 p a r ts 光検出デバイスの効率 : 光検出デバイスの効率 光検出デバイスコスト : 光検出デバイスコスト 光検出デバイスの種類 : 光検出デバイスの種類 光検出デバイスの個数 : 光検出デバイスの個数 コスト 現状:2万 : CsI密度 : 絶対効率 時間換算係数 :int = 3 データ保存周期 :int = 3 <<block>> ビ ュー ア /放射線検知部個数 :int p ar ts : 計測装置パッケージングコスト 計測装置コスト : 計測装置コスト 計測装置パッケージングコスト : 計測装置パッケージングコスト p ar ts 結晶個数 : 結晶個数 表面処理加工費 : 表面処理加工費 切り出し加工費 : 切り出し加工費 結晶サイズ : 結晶サイズ : CsI密度 : 線源強度(Bq/sec) cpm-μSv/h変換式傾き :double = 0.5 - <<block>> 計測 装置 - : 計測時間 <<block>> 放射 線算 出 p a rt s : 線源距離 サンプル充填容器コスト : サンプル充填容器コスト <<block>> 遮光材 <<block>> シン チレ ー タ : 計測時間 : 感度(CPM) <<block>> サ ン プル 装 填容 器 <<block>> ハ ウジン グケー ス コスト 現状:25万, 目標:2万 <<block>> ヨウ化 セシ ウム : CsI線吸収係数 <<block>> γ線 <<block>> シン チレ ー ション 光子 <<valueType>> 電圧 ta g s quantityKind = unit = <<valueType>> エネル ギー 値 : 線源が検出器を見込むコーン角 t ags quantityKind = unit = : 線源が検出器を見込むコーン角 : 線源が検出器を見込むコーン角 : 線源距離 : 結晶幅 : 線源距離 : 結晶幅 謝辞:本製品は,(独)科学技術振興機構(JST)平成24年度先端計測分析技術・機器開発プログラム【重点開発領域「放射線計測 領域」】のご支援,ならびに関係者各位の多大なるご協力による成果です.ここに記して各位への深甚の謝意を表します.
- 20. 概要 持ち運べる超小型・軽量 電子顕微鏡.”より身近に”,”より手軽に”電子顕微鏡を体験 機能単位でRTコンポーネント化することで、システム全体機能の追加・修正が容易に 設計から実装までをサポート可能な開発環境を整備 特徴 ユーザインターフェース部分:Andoroid版RTミドルウェアを使用 リアルタイム制御部分:T‐Kernel版RTミドルウェアを使用 SysMLモデルから各種RTコンポーネントを開発する環境を整備 Mobile SEM 開発環境 SysMLモデルを基にしたRTCコード生成,RTシステム構成情報生成 ※本発表内容は、独立行政法人 科学技術振興機構の研究成果展開事業(先端計測分析技術・機器開発プログラム) 「先端計測分析機器用共通ソフトウェアプラットフォームの開発」による成果である
- 21. ・筑波⼤学連携⼤学院 連絡先: arthur.murakami@aist.go.jp 概要 最近発売されたBeagleBone Blackに注目し、RT‐Middlewareの導入を試みた BeagleBone BlackでRTMを使うための補助ツール三つを作成 RTMインストール補助ツールを使うことでインストールが数分までに短縮 特徴 RTMのパッケージを作成 電源投入時にプログラムが自動的に起動する仕組みを作成 以上の仕組みを一発でインストールするスクリプトの作成 (BeagleBone BlackのIPアドレスを取得する仕組みの作成) BeagleBone Black CPU Coretex‐A8 1GHz RAM 512MB OS AngstromLinux 価格 $45 IO A/D×7 PWM×6 タイマ×4 シリアル×4 CAN SPI I2C • • • • • • • • 低コスト リッチなスペック 入手しやすい 開発しやすい ストレージのアクセス速度 が速い 多様なIO 通常のLinuxが動く USBでの起動、アクセスが 出来る 環境構築の仕組み • RTMをパッケージ形式でインストール 改善された方法 オリジナルの手法 RTMソースコード 数時間にわたる コンパイル! RTMバイナリ ダウンロード • パッケージの公開場所 RTMバイナリ インストール RTM実行可能 omniORB/OpenRTM‐aist のパッケージを作成・公開 サーバーにある RTMバイナリ インストール RTM実行可能 http://openrtm.org/ BeagleBone Black で検索 • BeagleBone Finder RTMの自動起動 電源を入れるだけでRTコンポーネントが自動的に 起動する仕組みを構築。 ネットワーク 開発用PC 組込みシステムとしての 運用が可能に! センサ1 センサ2 センサ3 センサ4 モニタリング ネットワーク上のBeagleBone を検索するツール ARPプロトコルによりネットワーク 上のMACアドレスとそのIPアドレ スのリストを作成 BeagleBone Black BeagleBone Finderを実行し、 SSHによるログインが可能に IPアドレスの取得を行えた →ヘッドレスシステムの実現