
Recomendados
Mais conteúdo relacionado
Semelhante a Diapositivas capitulo 1
Último
Último (20)
Diapositivas capitulo 1
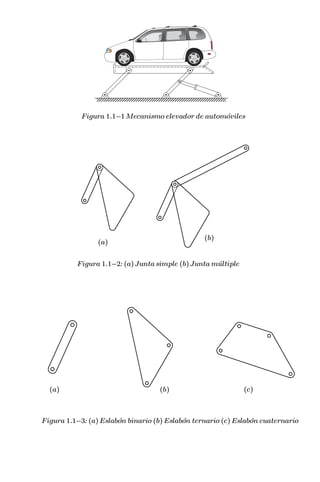
- 1. Figura 1.1-1 Mecanismo elevador de automóviles (b) (a) Figura 1.1-2: (a) Junta simple (b) Junta múltiple (c) Figura 1.1-3: (a) Eslabón binario (b) Eslabón ternario (c) Eslabón cuaternario (a) (b)
- 2. (c) (b) (a) Figura 1.3-1: (a) Cadena abierta (b) Cadena cerrada (c) Cadena mixta A B O C D C B E F A (e)(d) (c)(b) Figura 1.4-1: (a) Par de rotación (b) Par prismático (c) Par helicoidal (d) Par cilíndrico (e) Par esférico (a)
- 3. Figura 1.4-2: (a) Par plano (b) Par de leva (c) Par de engranaje (a) (c)(b) Figura 1.5-1: Mecanismo real y su diagrama cinemático E D C B A D A B E C
- 4. Dibújese los diagramas cinemáticos para los mecanismos mostrados en la siguiente figura: Figura 1.5-2: Mecanismo de (a) prensa (b) retorno rápido (c) elevación
- 6. Figura 1.6-1: Grados de libertad de un sólido rígido (a) en el espacio (b) en el plano β α θ O yx z x z y y xO x y θ (b)(a) Tipo de par cinemático Grados de libertad perdidos Par giratorio o de rotación 2 Par prismático o de traslación 2 Par helicoidal o de tornillo 2 Par de leva, engranaje o rodadura 1 O N M IJKJ J I G F E 12 11 10 9 8 7 5 1 1 1 1 1 1 2 2 2 2 3 3 3 3 4 4 4 5 5 6 6 6 A A A B B B B C C C C D D E F G D E F G H J L
- 7. bastidor eslabón de salida eslabón acoplador eslabón motriz Figura 1.7.1-1: Mecanismos de cuatro barras o cuadrilátero articulado E A B C D mecanismo de punto de cambio triple balancín doble balancín manivela balancín doble manivela Figura 1.7.1-2: Categorías de mecanismos de acuerdo al criterio de Grashof
- 8. segundo circuito de ensamble primer circuito de ensamble Figura 1.7.1-3: Inversiones geométricas de un mecanismo de cuatro barras E A B C D E A B C D Para el siguiente mecanismo de cuatro barras, determínese su categoría de acuerdo al cri- terio de Grashof. 30θ = 75 mm 60 mm 180 mm 195 235 mm O mm OA A B C ϭ Њ tercera inversión segunda inversión primera inversión mecanismo original cadena original Figura 1.8-1: Inversiones cinemáticas de un mecanismo de cuatro barras