Teoria de operacion fly back
•
1 gostou•6,537 visualizações

Teoría de funcionamiento de una fuente conmutada en topología FLYBACK y calculo de componentes del circuito.

Recomendados
Mais conteúdo relacionado
Mais procurados
Mais procurados (20)
Semelhante a Teoria de operacion fly back
Semelhante a Teoria de operacion fly back (20)
Último
Último (20)
Teoria de operacion fly back
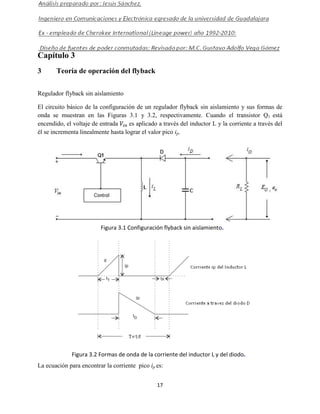
- 1. 17 Capítulo 3 3 Teoría de operación del flyback Regulador flyback sin aislamiento El circuito básico de la configuración de un regulador flyback sin aislamiento y sus formas de onda se muestran en las Figuras 3.1 y 3.2, respectivamente. Cuando el transistor Q1 está encendido, el voltaje de entrada ܸ es aplicado a través del inductor L y la corriente a través del él se incrementa linealmente hasta lograr el valor pico ip. La ecuación para encontrar la corriente pico ip es: Figura 3.1 Regulador de “Switcheo” Flyback Figura 3.2 Formas de onda de la corriente del inductor L y del diodo. Figura 3.2 Formas de onda del inductor L y el diodo D Figura 3.1 Configuración flyback sin aislamiento.
- 2. 18 ݅ ൌ ௧ Esto da lugar a una transferencia de energía de la fuente de entrada hacia el inductor: ܹ ൌ మ ଶ Cuando el transistor Q1 se apaga, el voltaje se autoinduce en el inductor L, lo cual ocasiona que circule corriente a través del diodo D transfiriendo toda la energía almacenada en el inductor al capacitor de salida y la carga RL ,disminuyendo la corriente del inductor linealmente de ݅ a cero, de acuerdo a la relación: ݅ ൌ ாೀ௧ವ La potencia entregada a la carga es igual a la energía pico almacenada en el inductor multiplicada por el número de ciclos por segundo y se calcula de acuerdo a la ecuación: ܲை் ൌ ܧைܫை ൌ మ ଶ El voltaje inducido en el inductor L es tal que el voltaje de salida Eo es opuesto en polaridad al voltaje de entrada ܸ. La relación entre ܧ y ܸ se establece combinando las ecuaciones 3.1 y 3.3. ா ൌ ௧ ௧ವ La corriente directa de salida ܫை es igual a la corriente promedio a través del diodo. ܫ ൌ ು ଶ ௧ವ ் ൌ ು ଶ ݐ݂ 3.1 Condiciones de diseño Las ecuaciones de diseño basadas en el modo de operación discontinuo, con corriente pico fija a través del inductor se muestran en la Figura 3.3. El peor caso ocurre cuando existe la siguiente condición: el voltaje de entrada es bajo y la corriente de salida es máxima. Bajo este escenario, la frecuencia es máxima y ݐ es cero, ya que el transistor se enciende tan pronto el diodo deja de conducir. 3.1) 3.2) 3.3) 3.4) 3.5) 3.6)
- 3. 19 ݅ ൌ 2ܫ௫ ൬ ܧ ܸ 1൰ ݐ ൌ ଵ ൬ ಶ ೇ ାଵ൰ ܮ ൌ ݐܧ ݅ ൌ ݐ்ܸ ݅ ܥ ൌ ݅ݐ 2∆݁ ܴܵܧ௫ ൌ ∆݁ ݅ 3.2 Regulador flyback con transformador de aislamiento El circuito regulador en topología flyback con aislamiento y sus formas de onda se muestran en las Figuras 3.4 y 3.5, respectivamente. Este circuito opera como se explica a continuación: cuando el transistor Q1 se enciende, la corriente comienza a crecer linealmente, hasta alcanzar el valor pico ܫ en el embobinado primario almacenando energía en el núcleo del mismo. Debido a que la polaridad del secundario es opuesta respecto a la del primario, ya que los devanados se configuran de esta forma, no hay transferencia de energía a la carga, puesto que el diodo D se Figura 3.3 Formas de onda del regulador flyback y sus ecuaciones asociadas.
- 4. 20 polariza inversamente. Cuando el transistor Q1 se apaga, el voltaje en los devanados se invierte debido a la autoinducción del campo magnético previamente almacenado y en ese momento, el diodo D conduce, cargando al capacitor C y proporcionando la corriente IL a la carga RL. El transformador de aislamiento T1 actúa como transformador y como choke a la vez y por esta razón no es necesario agregar el inductor de salida. Sin embargo, en la práctica, se usa un pequeño inductor entre el diodo D y el capacitor de salida C para nulificar los spikes de alta frecuencia que se producen debido a la conmutación. Figura 3.4 Convertidor flyback con transformador de aislamiento. Figura 3.5 Formas de onda de un convertidor flyback con transformador de aislamiento.
- 5. 21 3.3 Modo discontinuo vs continuo Una vez que se decidió utilizar topología flyback, la siguiente decisión que el diseñador enfrenta es la elección entre utilizar el modo continuo o el modo discontinuo. La Figura 3.6 compara las corrientes de primario y secundario y la energía almacenada en el transformador para estos dos casos. 3.4 Ventajas del modo discontinuo 1.- Emplea un transformador relativamente pequeño debido a que la energía almacenada promedio es baja. 2.- La estabilidad es más fácil de lograr, porque a frecuencias menores a la mitad de la frecuencia de trabajo, no se refleja la inductancia en el secundario y por lo tanto en la función de transferencia no hay un segundo polo. 3.- Los rectificadores de salida trabajan con corriente cero cuando se empieza a polarizar inversamente el diodo de salida. Por lo tanto, los requerimientos de tiempo de recuperación inversa de los diodos no son críticos. 4.- Similarmente, en el tiempo de encendido del transistor, el nivel de corriente inicia en cero, por lo que el tiempo de encendido no es crítico. 5.- Debido a que la corriente inicia de cero al momento del encendido del transistor, la generación de radiofrecuencias es baja. Figura 3.6 a) Modo discontinuo b) Modo continuo
- 6. 22 3.5 Desventajas del modo discontinuo 1.- Las corrientes pico generadas en el transistor y en el diodo son aproximadamente del doble de los que serían en modo continuo. 2.- Existen mayores pérdidas en regulación cruzada, debido a que la inductancia de fuga y la densidad de flujo del transformador son mayores en modo discontinuo. 3.- Las corrientes de ripple (rizo) son mayores y por lo tanto es necesario utilizar capacitancias mayores obteniendo ESR adecuados, es por esto que la respuesta a transitorios es menor. 3.6 Transistor de conmutación (switcheo) El transistor de conmutación “switcheo” usado en la topología flyback debe ser escogido para que pueda soportar el voltaje máximo drain-source Vdsmax durante el apagado y la corriente pico IP durante el encendido. El voltaje máximo que puede manejar el transistor Q1 durante el apagado se calcula con la siguiente ecuación: ܸௗ௦ ൌ ଵିೌೣ Donde ܸ es el voltaje de entrada de corriente directa y ܦ௫ es el máximo ciclo de servicio. La corriente de trabajo ܫ del MOSFET Q1 durante el tiempo de conducción se calcula con la siguiente ecuación: ܫ ൌ ூಽ En donde: ܫ = Es la corriente pico del primario del transformador-inductor T1 ݊ = Es la relación de vueltas primario-secundario del transformador T1 Para derivar una expresión de corriente pico de trabajo de Q1 en términos de la potencia de salida y el voltaje de entrada, la siguiente ecuación se puede escribir para obtener la energía transferida del inductor: ܲ௨௧ ൌ ቀ ூಽ మ ଶ் ቁ ߟ 3.12) 3.13) 3.14)
- 7. 23 Donde ߟ = es la eficiencia del convertidor. El voltaje a través del transformador-inductor T1 se puede expresar con la siguiente ecuación: ܸ ൌ ܮ ௗ ௗ௧ Si se asume que ݀݅ ൌ ܫ y ଵ ௗ௧ ൌ ೌೣ , entonces, al sustituir estos valores en la ecuación 3.15, se obtiene ܸ ൌ ܫܮ݂ ܦ௫ Ó, en función del inductor: ܮ ൌ ܸܦ௫ ܫ݂ Sustituyendo la ecuación 3.17 en la ecuación 3.14 se obtiene: ܲ௨௧ ൌ ቆ ܸ݂ܦ௫ܫ ଶ 2݂ܫ ቇ ߟ ൌ 1 2 ߟܸܦ௫ܫ ଶ Resolviendo para ܫ: ܫ ൌ ଶೀೆ ఎೌೣ Ahora, sustituyendo la ecuación 3.19 en 3.13 se obtiene la expresión para la corriente de trabajo ܫ del transistor Q1 en términos de la potencia de salida: ܫ ൌ ଶೀೆ ఎೌೣ 3.7 Cálculo del transformador en topología flyback Selección de la ferrita – (core/núcleo). Se deben considerar muchos factores al momento de hacer la selección de la ferrita. Los factores que se deben tomar en cuenta son los siguientes: a) Propiedades del material. b) Geometría de la ferrita. c) Propiedades emisivas de la superficie. d) La temperatura (temperatura rise). 3.15) 3.16) 3.17) 3.18) 3.19) 3.20)
- 8. 24 e) El tipo de ambiente donde el transformador trabajará. Selección del tiempo de encendido “On period”. El tiempo máximo de encendido para el transistor de “switcheo” ocurre cuando: el voltaje de entrada es mínimo y la carga demanda la corriente máxima. En este caso utilizaremos como tiempo de encendido máximo el 50% del período total del trabajo. Para este diseño la frecuencia de trabajo es ݂ ൌ 65 ݖܪܭ . Por lo tanto el tiempo de encendido máximo será: ݐைேሺ௫ሻ ൌ ் ଶ ൌ ଵ ଶ ൌ ଵ ଶሺହ௫ଵయሻ ൌ 7.6901ݔି s Calculo del voltaje DC de entrada mínimo VDCmin en la sección del convertidor Para calcular el número de vueltas en el primario se debe de considerar el voltaje DC de entrada mínimo en el inicio del devanado del transformador, ࢂࡰ (una vez que fue rectificado); para este diseño, la especificación del voltaje de entrada ࢂ es de 90V. Para tener una banda de seguridad para este diseño, tomaremos como el voltaje de entrada AC mínimo de 85 Vrms , también se debe considerar los voltajes de caída que existe en todo el trayecto de la entrada hasta la terminal del transformador T1, más el voltaje de rizo en el capacitor de entrada . Este voltaje de rizo oscila típicamente entre el 15% y el 30% del voltaje de entrada. Entonces tomando estas consideraciones el voltaje de entrada mínimo ܸ sería: ܸ ൌ ܸ√2 െ ሺ2ܸ ܸ௧ ܸ௭ሻ Donde: ܸ = es la caída de voltaje de los rectificadores del puente de diodos, igual a 0.7V por cada diodo ܸ௧= es la caída del circuito EMI + termistor + pistas, igual a 0.5V ܸ௭ = es el voltaje de rizo, consideramos arbitrariamente el 23 % del voltaje de entrada de 85V ܸ ൌ 85 ∗ √2 െ ൫ሺ2 ∗ 0.7ሻ 0.5 ሺ85 ∗ 0.23ሻ൯ ൌ 98.76ܸ ܸ ൎ 98.8ܸ Cálculo del mínimo número de vueltas en el primario ܰ. Para este cálculo se debe tomar en cuenta los siguientes factores: a) Que el voltaje sea el mínimo, ya rectificado y filtrado. 3.21)
- 9. 25 b) El tiempo de encendido máximo, en este caso ݐைே ൌ ் ଶ c) La densidad del flujo en Gauss. Para escoger la densidad de flujo existen varias formas, una de ellas es observar las características del material escogido. Se recomienda tomar la densidad máxima a 100Ԩ, es decir en el peor de los casos, para evitar que se sature la ferrita. Por experiencia, en configuraciones flyback la densidad de flujo se puede escoger entre 2000 y 2500 Gauss para empezar con el cálculo, y después, se puede verificar si esta densidad es la adecuada. Para este cálculo se ha escogido 2500G. d) Área efectiva de la ferrita, dato que se toma del manual del fabricante. Para este diseño, la ferrita seleccionada tiene una valor de ܣ ൌ 0.814ܿ݉ଶ . El mínimo número de vueltas del transformador del primario se puede calcular utilizando el enfoque volt-segundo para un sólo periodo durante el tiempo de encendido ݐைே, porque el voltaje aplicado es una forma cuadrada. Una vez que se tienen todos estos datos se utiliza la siguiente ecuación: ܰ ൌ ವݐܱܰ ∆ఉೌ Donde: ܰ = Número mínimo de vueltas del primario ܸ = Voltaje DC mínimo aplicado ݐைே = Es el tiempo de encendido ሺߤܵሻ = 7.6901ݔି seg ∆ߚ = Densidad de flujo máxima AC (Gauss) = 2500 G ܣ = Área mínima transversal del núcleo ሺܿ݉2 ሻ = 0.814 cm2 Sustituyendo los valores en la ecuación 16) obtenemos el número de vueltas del primario ܰ ൌ ವ௧ೀಿൈଵఴ ∆ఉಲ ൌ ଽ଼.ሺ.ଽ௫ଵషలሻൈଵఴ ଶହሺ.଼ଵସሻ ൌ 37.32 vueltas Para nuestro diseño utilizaremos ܰ ൌ 36 vueltas Calcular el número de vueltas del secundario ܰ.ݏ El voltaje de salida máximo especificado para este diseño es de 5.25V a la salida de la fuente; el voltaje en el devanado del secundario VS debe tomar en cuenta la caída de voltaje en el diodo rectificador de salida igual a 0.55V, más la caída de voltaje por las pistas y el inductor de salida, este voltaje se considerará igual a 0.2V, por lo tanto, el voltaje máximo en el secundario será: 3.22)
- 10. 26 ܸௌ௫ ൌ 5.25 0.55 0.2 ൌ 6 ܸݏݐ݈ . Es más conveniente expresar el voltaje y el número de vueltas del primario como unla cociente voltaje/relación-vuelta, ya que de ésta forma, nos permite calcular los volts por vuelta del secundario. ݏݐ݈ݒ ܽݐ݈݁ݑݒ ฬ ൌ 98.8ܸ 36 ൌ 2.74 ݏݐ݈ݒ ܽݐ݈݁ݑݒ Por lo tanto el número de vueltas en el secundario utilizando la ley del transformador es: ܰௌ ൌ ௦ ቀ ೡೞ ೡೠೌ ቁ ൌ ଶ.ସ ൌ 2.189 vueltas Para nuestro diseño el número de vueltas será ܰௌ ൌ 2 vueltas Ahora con los nuevos valores encontrados, se recalcula el nuevo valor de volts por vuelta del flyback ್ ே ܸ ܰ ൌ ܸݏ ܰݏ ൌ 6 2 ൌ 3 ݐ݈ݒ ܽݐ݈݁ݑݒ Donde: ್ ே = Nuevo valor de volts por vueltas del flyback Recalculo del tiempo de encendido ton máximo con la ecuación: ݐ ൌ ் ܸ݂ܾ ܰ ܸ݂ܾ ܰ ାቀ ೡೞ ೡೠೌ ቁ Donde: ݐைே = Tiempo de encendido de Q1, ሺߤܵሻ ܶ = Período total, ሺߤܵሻ ್ ே = Nuevo valor de volts por vueltas del secundario del flyback ௩௧௦ ௩௨௧ = Volts por vuelta del primario 3.23)
- 11. 27 Sustituyendo los valores anteriores en la ecuación 3.23), se obtiene el nuevo valor del máximo del ciclo de encendido: ݐ ൌ ் ೇ್ ಿ ೇ್ ಿ ାቀ ೡೞ ೡೠೌ ቁ ൌ ଵହ.ଷ଼ൈଵషలሺଷሻ ଷାଶ.ସ ൌ 8.04 ൈ 10ି seg Cálculo del número de vueltas del voltaje auxiliar “bootstrap”. El voltaje Vcc que necesita el modulador PWM para poder comenzar a trabajar debe ser mayor a 16V y una corriente máxima de 1mA. , para este diseño se consideró que el voltaje ܸ௨௫ = 18V ܰ௨௫ ൌ ಳ ܸ݂ܾ ܰ ൌ ଵ଼ ଷ ൌ 6 vueltas Consideraciones generales: Escoger el modo de operación La Figura 3.7 muestra la transferencia de energía completa, en el modo de discontinuo en el cual destaca una corriente pico Ip muy grande, lo cual da lugar a grandes pérdidas en el transistor de switcheo, en los diodos y los capacitores de salida, además de las pérdidas por calentamiento ܫଶ ܴ en los embobinados del trasformador. La Figura 3.8 muestra el resultado de utilizar un transformador con una mayor inductancia en su primario, dando lugar a una pendiente pequeña de corriente. Este modo de operación se llama transferencia de energía incompleta. La ventaja de este modo con respecto al anterior, es que existen menos pérdidas debido a la componente de DC de magnetización y a la alta permeabilidad de la ferrita lo cual da por resultado que se sature. Figura 3.7 Transferencia de energía completa.
- 12. 28 La Figura 3.9 muestra la transferencia de energía óptima, con una aceptable corriente pico y una componente de DC efectiva de 1/3 del valor de éste. Para éste diseño, se asumirá que el modo de operación es el de transferencia de energía completa en modo discontinuo, como se muestra en la Figura 3.10. Cálculo de la inductancia del primario L Con la forma de onda de la corriente del primario que muestra la Figura 3.10, se establecen las siguientes ecuaciones, de la ecuación 3.15), se despeja la corriente: Figura 3.10 Forma de onda para transferencia de energía completa en modo discontinuo. Figura 3.8 Transferencia de energía incompleta (máxima inductancia del primario). Figura 3.9 Transferencia de energía incompleta (óptima inductancia del primario).
- 13. 29 ∆݅ ൌ ௧ೀಿ Ya que la potencia entregada a la carga es igual a la energía pico almacenada en el inductor multiplicado por el número de ciclos por segundo como lo establece la ecuación 3.14) ܲ௨௧ ൌ ቀ ூಽ మ ଶ் ቁ ߟ, y ya que ܲ ൌ ೠ ఎ , obtenemos: ܲ ൌ ൬ ∆୧ై మ ଶ் ൰ Reacomodando la ecuación 3.14), ∆݅ܮ ൌ ܸݐைே y la ecuación 3.25), 2ܶܲ ൌ ∆݅൫∆݅ܮ൯, y sustituyendo el tiempo de encendido, ݐைே ൌ ் ଶ , en la ecuación 3.24), se hacen manipulaciones algebraicas: ∴ 2ܶܲ ൌ ∆݅ሺܸݐைேሻ, ∆݅ ൌ 2ܶܲ ܸݐைே ൌ 2ܶܲ ܸ ܶ 2 ൌ 4ܲ ܸ y se obtiene la ecuación para calcular la corriente pico del primario: ∆݅ ൌ ସ Donde: ߟ= eficiencia del convertidor = 65 % ܲ ൌ ೠ ఎ ∗ 100 ൌ .ହ ൌ 92.3ܹ ܸ ൌ ܸ ൎ 98.8ܸ, sustituyendo estos valores en la ecuación 3.26) ∆݅ ൌ ସ ವ ൌ ସሺଽଶ.ଷሻ ଽ଼.଼ ൌ 3.736ܣ Una vez encontrado el valor de la corriente pico del primario, utilizando la ecuación 3.24), ∆݅ ൌ ௧ , y el valor encontrado del tiempo de encendido máximo ݐைே ൌ 8.0401ݔି para calcular el valor mínimo de la inductancia requerida: ܮ ൌ ܸݐைே ∆݅ ൌ 98.8 ∗ 8.0401ݔି 3.736 ൌ 214.6901ݔି ܪ Considerando las tolerancias debido al material del núcleo (core) y el entrehierro (gap), se aumentará en un 35% más el valor de la inductancia. 3.24) 3.25) 3.26)
- 14. 30 ܮ ൌ 214.69 ൈ 10ିሺ1.35ሻ ൌ 289.83ߤܪ En la práctica, el valor nominal de la inductancia utilizada es de 300ߤܪ േ 20% . Usando el valor nominal de la inductancia, es necesario recalcular la corriente pico del primario ∆݅ ൌ ݅ como sigue: ∆݅ ൌ ݅ ൌ ඨ 2ܲܶ ܮ ൌ ඨ 2ሺ92.3ሻሺ15.3801ݔିሻ 30001ݔି ൌ 3.076 ܣ Cálculo del gap (entre hierro) Una vez que se encontró el valor de la inductancia del primario ܮ y el número de vueltas ܰ, el entrehierro (gap) se puede obtener de la siguiente forma; si se asume que la mayor parte de la reluctancia estará en el aire del entrehierro (que es el caso normal), entonces, el tamaño del entrehierro lୟ୮, se encuentra con la siguiente ecuación: lୟ୮ ൌ ఓఓೝேమൈଵషమ (cm) Donde: ܮ = Inductancia, 300 x 10-6 (H) ߤ ൌ 0.4ߨ 01 ݔି ߤ = Permeabilidad relativa igual a 1 ܰ = Número de vueltas, 36 ܣ = Área efectiva de la ferrita, 0.814 (cm2) lgap = Espacio del entrehierro (cm) Sustituyendo estos valores en la ecuación 3.27) lୟ୮ ൌ 0.4ߨܰଶ 01ݔ݁ܣି଼ ܮ ൌ 0.4ߨሺ36ሻଶሺ0.814ሻ01ݔି଼ 30001ݔି ൌ 0.04418ܿ݉ Convirtiendo los 0.04418 cm a pulgadas, se obtiene un gap de lୟ୮ ൌ 0.01739 de pulgada, redondeando, se utilizará un gap de 0.018” en el centro de la ferrita (core). La Figura 3.11 ejemplifica el core tipo “E” con entrehierro central (central gap). 3.27)
- 15. 31 Densidad de flujo ߚ௫ Verificación y márgenes de saturación Es necesario verificar la densidad de flujo máxima en el núcleo (core), para asegurar que exista un margen adecuado de seguridad entre la densidad de flujo de trabajo máxima y la de saturación. Es esencial prevenir que el núcleo se sature bajo cualquier condición, incluyendo los cambios repentinos de carga (transient load) y alta temperatura. Esta densidad de flujo se puede calcular utilizando la ecuación 3.22) como sigue: ߚ ൌ ܸݐைே ܰܣ Ahora se calculará la densidad de flujo pico ߚ con el voltaje de entrada mínimo y máxima potencia de salida. Donde ߚ es el cambio en la densidad de flujo requerido para mantener el voltaje pulsante aplicado, no incluyendo ninguna componente DC. Esto significa que es independiente del tamaño del gap. Sustituyendo los valores conocidos previamente: ߚ ൌ ሺ98.8ሺ8.0401ݔି ሻ10଼ሻ 36ሺ0.814ሻ ൌ 2700 ݃ܽݏݏݑ Para calcular la contribución de la componente DC, ߚ se utiliza. ߚ ൌ ߤ ൌ ሺఓேು ூವሻ ೌൈଵషయ Donde: ߤ ൌ 4ߨ01ݔି ு Figura 3.11 Ferrita tipo E con gap. 3.28)
- 16. 32 ܫ ൌ ݏ݁ݎ݁݉ܽ ݊݁ ݅݀݁݉ݎ ܥܦ ݁݀ ݁ݐ݊݁݅ݎݎܥ ݈ ൌ ܽ݃ ݎ݅ܣሺ݉݉ሻ ߚ ൌ ݏ݈ܽݏ݁ݐ ݊݁ ܥܦ ݆ݑ݈݂ ݁݀ ݀ܽ݀݅ݏ݊݁ܦ Primero se calcula el valor de ܫ ൌ ∆ಽ ଶ ൌ ଷ. ଶ ൌ 1.538ܣ y se sustituyen los valores en 3.28) ߚ ൌ 0.4ߨ01ݔି ሺ36ሻ1.538 0.44189 ൈ 10ିଷ ൌ 0.015745ܶ ൌ 157.45 ݃ܽ ݏݏݑ La suma de la componente de la densidad de flujo AC y DC para este diseño es: ߚ௫ ൌ ߚ ߚ ൌ 2700 157.45 ൌ 2857.454 ݃ܽݏݏݑ Esta suma provee el valor pico de operación para la ferrita. El cual se tiene que corroborar con la especificación del fabricante a 100 o C y no debe ser excedida. Cálculo de los calibres de los alambres para el transformador Calcular el calibre del alambre del devanado primario (Np = 36 vueltas) La corriente ݅ que se obtuvo es igual a: ∆݅ ൌ ݅ ൌ ඨ 2ܲܶ ܮ ൌ ඨ 2ሺ92.3ሻሺ15.3801ݔିሻ 30001ݔି ൌ 3.076 ܣ Ahora se calcula la corriente promedio, cuya forma de onda se muestra en la Figura 3.12 utilizando la siguiente ecuación: ܫ௩ ൌ ݅ 2 ൌ 3.07 2 ൌ 1.53ܣ El cálculo de la corriente RMS se obtiene con: ܫோெௌ ൌ ݅ඨ ܦ௫ 3 ൌ 3.07ඨ 0.5 3 ൌ 1.25 ܣ Utilizando el catálogo de Magnetics en la tabla de calibres se observa que la capacidad de manejo de corriente conocida en inglés como “Current Capacity” (mA), para este diseño se usa como base @ 500 circular mil/amp; de acuerdo al cátalogo de magnetics, el calibre del alambre Figura 3.12 Forma de Onda de ip
- 17. 33 AWG 23 a 500 circular mil/amp maneja 1.02 A, y el alambre calibre AWG 22 maneja 1.28 A ya que la corriente RMS es igual a1.25 A, utilizaremos el calibre AWG 22. Cálculo del calibre del alambre del devanado Auxiliar (Naux = 18 vueltas) El calibre del alambre deberá manejar una corriente mínima para alimentar al modulador, cuya demanda es de aproximadamente 10mA, se calcula para 20mA. De acuerdo al catálogo de Magnetics, se debe utilizar alambre de calibre AWG 40 pero debido a que es muy difícil manejar este calibre desde el punto de vista de manufactura, se utilizará el calibre AWG 28 , este maneja 3/8mA @500 circular mil/amp. Cálculo del calibre del alambre del secundario para la salida de 5V (N5 = 2 vueltas) La corriente de salida es igual a 10 amperes, calcular la corriente RMS con la siguiente ecuación: ܫோெௌ ൌ 1.29 ∗ 10 ൌ 12.9 ܣ 3.8 Circuitos snubber Teoría Los snubbers son esenciales en cualquier fuente de poder. Sirven para mejorar el funcionamiento de las fuentes en las siguientes áreas: 1.- Mayor confiabilidad. 2.- Mayor eficiencia. 3.- Mayores frecuencias de trabajo. 4.- Minimizan el tamaño de la fuente. 5.- Disminuye la EMI (Electromagnetic Interference). Su principal función es absorber la energía de los elementos reactivos del circuito. Cuando un snubber está bien diseñado, el transistor de switcheo tendrá una disipación promedio menor, de pico menor y voltajes y corrientes pico menores. Para este diseño se utilizará el snubber de voltaje RCD (Resistencia, Capacitor, Diodo) en modo “clamp” que sirve para “recortar” el voltaje que experimenta el MOSFET entre sus terminales drenaje-fuente para evitar exceder el parámetro máximo que el proveedor especifica. El transistor por si mismo tendrá que soportar la potencia pico de disipación durante el tiempo de apagado, sólo el pico de voltaje será limitado.
- 18. 34 Las Figuras 3.13 y 3.14 muestran la topología de un convertidor flyback en modo discontinuo con varios componentes parásitos, tales como las inductancias de fuga del primario y del secundario, una capacitancia de salida del MOSFET y otra en la unión del diodo de salida. Figura 3.14 Formas de onda de un convertidor flyback en modo discontinuo. Figura 3.13 Configuración flyback con componentes parásitos.
- 19. 35 Cuando el MOSFET se apaga, la corriente del primario id carga a COSS del MOSFET en un tiempo corto. Cuando el voltaje en la capacitancia COSS (ܸௗ௦) excede el voltaje de entrada más el reflejo del voltaje de salida (ܸ + ܸ݊), el diodo del secundario conduce, así que, el voltaje en la inductancia magnetizante (Lm) es recortado (clamped) a ܸ݊. Por lo tanto, hay una resonancia entre Llk1 y COSS con altas frecuencias y alto voltaje. Este voltaje excesivo puede causar que el MOSFET se dañe. Además se presenta otro fenómeno de resonancia entre Lm y COSS durante el período de operación del MOSFET. 3.9 Diseño del snubber El voltaje excesivo debido a la resonancia entre Llk1 y COSS debe ser suprimido a un nivel aceptable, agregando componentes adicionales al circuito para proteger el switch principal, el MOSFET. El circuito snubber RCD y sus formas de onda se muestran en la Figura 3.15. Cuando el MOSFET se apaga y ܸௗ௦ es cargado a (ܸ௦ െ ܸ݊), la corriente de primario fluye al capacitor ܥ௦ a través del diodo Dsn, el diodo secundario conduce al mismo tiempo. Por lo tanto, el voltaje a través de la inductancia de fuga Llk1 es igual a (ܸ௦ െ ܸ݊). La pendiente de la corriente ݅௦ se calcula como sigue: Figura 3.15 Convertidor flyback con snubber RCD y sus formas de onda de corriente y voltaje.
- 20. 36 ௗೞ ௗ௧ ൌ െ ቀ ೞି ೖభ ቁ Donde ݅௦ es la corriente que fluye hacia el circuito snubber, ܸ௦ es el voltaje a través del capacitor Csn, ݊ es la relación de vueltas del transformador y Llk1 es la inductancia de fuga del transformador, ݅ es la corriente pico del primario. El tiempo ݐ௦ se obtiene como sigue: ݐ௦ ൌ ቀ ೖ ೞି ቁ ݅ El voltaje del capacitor (ܸ௦ ) se debe determinar con las condiciones de voltaje de entrada mínimo y a máxima carga. Una vez que ܸ௦ se determinó, la potencia disipada en el circuito snubber con las condiciones mencionadas se obtiene: ܲ௦ ൌ ܸ௦ ݅ݐ௦ 2 ݂௦ ൌ 1 2 ܮ݅ ଶ ൬ ܸ௦ ܸ௦ െ ܸ݊ ൰ ݂௦ Donde ݂௦ es la frecuencia de trabajo del convertidor flyback igual a 65Khz. El voltaje ܸ௦ se debe considerar de 2 a 2.5 veces el voltaje ܸ݊, ya que si Vsn es pequeño, puede resultar en daños severos al circuito snubber. Por otro lado, la resistencia disipada en la resistencia ܴ௦, es igual a ܸ௦ ଶ /ܴ௦, el valor de la resistencia de obtiene: ܴ௦ ൌ ೞ మ భ మ ೖೌೖ మ ቀ ೇೞ ೇೞషܸ݊ ቁೞ La potencia de la resistencia se debe escoger en base a la potencia perdida. Y el voltaje de rizo del capacitor ܥ௦ se calcula como sigue: ∆ܸ௦ ൌ ೞ ೞோೞೞ En general, es razonable considerar de 5 a 10% de voltaje de rizo. Por lo tanto, la capacitancia se calcula usando la ecuación 3.33. La corriente pico ܫ se calcula tomando en cuenta el voltaje de entrada máximo y máxima corriente de salida, esta ecuación es: ܫ ൌ ට ଶ ೞ Donde ܲ es la potencia de entrada y ܮ es la inductancia magnetizante del transformador. A continuación se da un ejemplo para el cálculo del circuito snubber: 3.29) 3.30) 3.31) 3.32) 3.33) 3.34)
- 21. 37 Las especificaciones para el convertidor flyback son: el rango de voltaje de entrada es de 85VAC a 264VAC, 60W de potencia de salida, 5V de voltaje de salida (tomar el voltaje de salida regulado al mínimo, que en este caso es igual a 4.75V) y la frecuencia de trabajo igual 65KHz. Cuando el snubber usa un capacitor de 0.01 ߤF y una resistencia de 20K, la Figura 3.16 muestra la forma de onda a 264VAC cuando el MOSFET está encendido. El voltaje total es igual a: 374 +85.5 + 171= 630.5V El voltaje de trabajo del MOSFET que se usará es de 600V y de acuerdo a las mediciones realizadas, se excede este voltaje. Puede haber dos razones para que suceda esto: error en el diseño del transformador o error en el diseño del snubber. Por lo tanto, el circuito snubber debe ser rediseñado. Para calcular la resistencia ܴ௦ se debe considerar que el voltaje ܸ௦ es el doble de ܸ݊, ܸ௦ = 2(18 x 4.75) = 85.5V, Llk1 es igual a 300 µH , y la corriente ݅ es igual a 300mA con estos valores medidos se puede obtener la resistencia usando la ecuación 3.32: ܴ௦ ൌ 171ଶ 1 2 300 ∗ 10ି ∗ 0.3ଶ ቀ 171 171 െ 85.5 ቁ 65 ∗ 10ଷ ൌ 20.527Κ Se usa una resistencia de 22 K . La potencia disipada de ܴ௦ se calcula como sigue: ܲ௦ ൌ ܸ௦ ଶ ܴ௦ ൌ 171ଶ 22 ∗ 10ଷ ൌ 1.329ܹ Asumiendo que el voltaje de rizo máximo del capacitor sea 5%, el capacitor se calcula usando la ecuación 3.33 y despejando ܥ௦. ܥ௦ ൌ ܸ௦ ∆ܸ௦ܴ௦݂௦ ൌ 171 8.5 ∗ 22 ∗ 10ଷ ∗ 65 ∗ 10ଷ ൌ 1.41 ∗ 10ି଼ El valor usado fue de 4.7*10-8 F, y el resultado se muestra en la Figura 3.17. Figura 3.16 Formas de onda del convertidor flyback.
- 22. 38 Figura 3.17 Formas de onda del convertidor flyback: capacitor de 0.047uF y resistencia de 22KΩ.