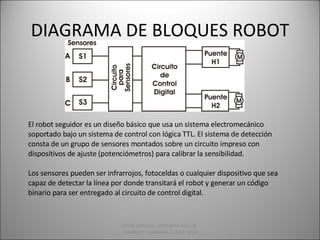
1. DIAGRAMA DE BLOQUES ROBOT El robot seguidor es un diseño básico que usa un sistema electromecánico soportado bajo un sistema de control con lógica TTL. El sistema de detección consta de un grupo de sensores montados sobre un circuito impreso con dispositivos de ajuste (potenciómetros) para calibrar la sensibilidad. Los sensores pueden ser infrarrojos, fotoceldas o cualquier dispositivo que sea capaz de detectar la línea por donde transitará el robot y generar un código binario para ser entregado al circuito de control digital. DAVID VARGAS - DEYANIRA VIILLAR - HUMBERTO BARRERA CURSO SENA
2. A continuación se desarrollará un robot seguidor de línea con las consideraciones de diseño planteadas. En los gráficos se observa un ejemplo de cómo quedarán los sensores de nuestro Robot para detectar la línea y así desarrollar el algoritmo de movimiento del robot. DAVID VARGAS - DEYANIRA VIILLAR - HUMBERTO BARRERA CURSO SENA
4. Después de tener todas las funciones del circuito de control digital se procede a implementar con compuertas cada una de las funciones. A continuación se muestra el ejemplo correspondiente a la salida del motor 1 adelante : DAVID VARGAS - DEYANIRA VIILLAR - HUMBERTO BARRERA CURSO SENA
5. Después de tener todas las funciones del circuito de control digital se procede a implementar con compuertas cada una de las funciones. A continuación se muestra el ejemplo correspondiente a la salida del motor 1 adelante : DAVID VARGAS - DEYANIRA VIILLAR - HUMBERTO BARRERA CURSO SENA
6. DAVID VARGAS - DEYANIRA VIILLAR - HUMBERTO BARRERA CURSO SENA
7. Para la estructura mecánica se aconseja utilizar materiales livianos pero resistentes. Se pueden usar planchas de aluminio, de plástico, PVC, madera, etc. También se puede construir el robot con piezas de Mecano, Lego o equivalentes. Las ruedas de empuje, se aconseja que tengan excelente tracción y que sean livianas como las de la figura. La rueda posterior debería ser omnidireccional o más conocida como “rueda loca”. DAVID VARGAS - DEYANIRA VIILLAR - HUMBERTO BARRERA CURSO SENA
8. Cuando se calibren los sensores la iluminación del ambiente será artificial o natural, nunca habrá exposición solar directa. Es necesario aclarar que lo expuesto en esta guía es solo un ejemplo, los valores de la tabla de estado, los motores, el diseño del chasis pueden cambiar según lo considere el estudiante. Este proyecto es la culminación de un semestre por lo tanto la presentación final debe estar acorde con los conocimientos adquiridos. DAVID VARGAS - DEYANIRA VIILLAR - HUMBERTO BARRERA CURSO SENA
9. PRESENTACION FINAL DE MICROPROYECTO DAVID VARGAS - DEYANIRA VIILLAR - HUMBERTO BARRERA CURSO SENA