

Recomendados
Mais conteúdo relacionado
Destaque
Destaque (20)
Semelhante a budowa komputera
Semelhante a budowa komputera (10)
Mais de Bogdan Miś
Mais de Bogdan Miś (20)
budowa komputera
- 1. Budowa komputera Komputer określany mianem PC (Personal Computer), czyli osobisty, zdobył największą popularność, zarówno w różnych dziedzinach działalności zawodowej, jak i w domach. Określenie PC spotyka cię w literaturze fachowej, reklamach i mowie potocznej od 1981 roku, kiedy to firma IBM (International Business Machines Corporation) wprowadziła na rynek mikrokomputer serii IBM PC. Komputer (mikrokomputer) jest to zestaw urządzeń elektronicznych, realizujący przetwarzanie informacji (danych). Pojęcie przetwarzania danych jest bardzo szerokie, bo kryje się pod nim zarówno przetwarzanie prostych i złożonych tekstów, organizacja baz danych, realizacja obliczeń finansowych a także przetwarzanie grafiki oraz dźwięku w praktycznie dowolnej postaci. Za pomocą komputera można sterować innymi urządzeniami takimi jak np. centrala telefoniczna. Aby właściwie i efektywnie wykorzystywać komputer istnieje konieczność posiadania odpowiedniego oprogramowania. Na zamówienie firmy IMB został opracowany przez firmę Microsoft dziś już coraz rzadziej stosowany system operacyjny DOS (Disk Operating System). Obecnie jego miejsce zajmuje opracowany także przez tą samą firmę system Windows 98, Milenium, XP, NT. Poza systemem operacyjnym do pracy komputera niezbędne są również inne programy umożliwiające obsługę urządzeń zewnętrznych takich jak monitor czy drukarka. W związku z bardzo dynamicznie rozwijającym się rynkiem komputerów programy i systemy operacyjne stają się coraz prostsze w obsłudze, przez co są bardziej przyjazne dla użytkownika. Dzisiejsze komputery to nie tylko maszyny liczące wspomagające prace badawcze, ale także: kasy fiskalne sklepie, urządzenia sterujące miliardami połączeń telefonicznych, pomagające w skomplikowanych operacjach bankowych i wykonujące wiele innych działań w przemyśle, medycynie oraz wkraczające coraz częściej do naszych domów. Dla pełnego zrozumienia znaczenia komputerów istotne jest poznanie historii ich rozwoju oraz wpływu na rozwój cywilizacji. Ludzkość wytwarza coraz więcej informacji. Tak wiele, że jej przetwarzanie, czyli pamiętanie, klasyfikowanie, poszukiwanie, obrazowanie i zestawianie jest ponad ludzkie siły. Dlatego tak duże znaczenie osiągnęły maszyny , które radzą sobie z tym zadaniem lepiej i szybciej od człowieka - komputery. Komputery, czyli maszyny liczące ( z ang. compute - obliczać) mają więcej lat niż się na ogół
- 2. przypuszcza. Za przodków komputera uznać, bowiem należy wszystkie urządzenia służące do liczenia. Prawie 5000 lat temu w środkowej Azji powstało urządzenie liczące nazywane Abacus i uznawane za pierwsze mechaniczne urządzenie tego typu. Po polsku nazywamy je liczydłami i o dziwo - liczydła w niektórych regionach świata używane są do dzisiaj. Zbudowane w postaci nanizanych na sztywny pręt przesuwanych w trakcie wykonywania operacji kuleczek lub talerzyków liczyło w kombinowanym systemie dwójkowo-piątkowym. Liczydła straciły nieco swą popularność wraz z upowszechnieniem papieru i pióra. Niemniej jednak przetrwały w niektórych biurach do połowy lat 50-tych naszego wieku ze względu na niewielką cenę i prostotę. W roku 1642 Blaise Pascal (1623 -1662), mający wówczas 18 lat syn francuskiego poborcy podatkowego, skonstruował maszynę liczącą, nazwaną (Pascaline), która miała ułatwić ojcu obliczanie i sumowanie zebranych podatków. Pascal pracował nad nią wiele lat, ulepszał ją i wykonał sam kilkanaście egzemplarzy tego urządzenia. Maszyna Pascala miała tylko możliwość dodawania liczb ośmiocyfrowych. W 1694 r. niemiecki matematyk i filozof, Gottfried Wilhelm von Leibniz (1646 -1716), wykorzystał doświadczenia Pascala do stworzenia maszyny, która mogła również wykonywać operacje mnożenia. Podobnie jak jego poprzednik, Leibniz wykorzystał do wykonywania operacji system odpowiednio sprzężonych mechanicznie i obracających się przekładni, krążków i dźwigni. Znając z notatek i opisów rozwiązanie Pascala mógł on udoskonalić jego konstrukcję. W 1820 francuski konstruktor Xavier Thomas de Colmar skonstruował urządzenie nazywane potem popularnie arytmometrem, które mogło wykonywać cztery podstawowe operacje matematyczne. Arytmometry były powszechnie używane do I wojny światowej, a w wielu krajach w znacznie ulepszonej postaci (już jako urządzenia elektryczne) można je było spotkać w biurach i urzędach jeszcze w latach 60-tych naszego stulecia. Za najwybitniejszego twórcę maszyn liczących, żyjącego przed erą elektroniczną, uważa się Anglika Charlesa Babbage'a (1791 - 1871). Swoją pierwszą maszynę nazwaną - maszyną różnicową, ( gdyż wykonywała obliczenia metodą różnicową), konstruował przez ponad 10 lat. Trapiony jednak wieloma kłopotami rodzinnymi i finansowymi oraz nie mogąc do końca porozumieć się ze swoim głównym wykonawcą - konstruktorem Clementem zaprzestał dalszych prac nad nią w 1842 roku. Zmontowaną część maszyny (podobno nadal sprawną) można oglądać w Muzeum Nauk w Londynie. Należy dodać, że w odróżnieniu od maszyn Leibniza i Pascala, po ręcznym ustawieniu początkowego stanu, dalsze działania maszyny różnicowej nie wymagają już żadnej ingerencji użytkownika poza kręceniem korbą. Koniec XIX wieku był początkiem rozwoju urządzeń mechanograficznych, których
- 3. głównym przeznaczeniem było usprawnienie rachunków statystycznych, księgowych i biurowych. Zaczęło się w Stanach Zjednoczonych od Hermana Holleritha, który postanowił zautomatyzować prace statystyczne związane ze spisem ludności przeprowadzanym wtedy w Stanach co dziesięć lat. Hollerith sięgnął po elektryczność, jako źródło impulsów i energii, rozwinął postać karty perforowanej, na której zapisywano dane i zbudował elektryczny czytnik - sorter kart. Olbrzymim sukcesem Holleritha okazał się spis 1890 roku, którego wyniki zostały całkowicie opracowane za pomocą jego urządzeń na podstawie danych zebranych na jego kartach. W następnych latach Hollerith dostarczał lub wypożyczał swoje urządzenia do przeprowadzenia spisów w wielu krajach, w tym także w Europie, między innymi w Rosji. Na przełomie XIX i XX wieku powstało wiele firm, które początkowo oferowały maszyny sterowane kartami perforowanymi i z latami zyskiwały na swojej potędze a wiele z nich przetrwało do dzisiaj, jak na przykład IBM, Bull, Remington - Rand, Burroughs, a także NCR (kasy), i Bell (telefony). Udoskonalona i znormalizowana karta perforowana przez wiele dziesięcioleci była uniwersalnym nośnikiem informacji, a pierwsze maszyny mechaniczne do przetwarzania danych zapoczątkowały stale rosnący popyt na przetwarzanie informacji. W latach II wojny światowej Alan Turing został włączony do grupy specjalistów zajmujących się w Wielkiej Brytanii deszyfracją kodów Enigmy - maszyny, którą Niemcy używali do kodowania meldunków i rozkazów rozsyłanych swoim jednostkom na wszystkich frontach. W 1941 roku działalność tej grupy przyczyniła się do zredukowania brytyjskich strat na morzach o 50%. Brytyjscy specjaliści korzystali z materiałów (wśród których był egzemplarz Enigmy oraz maszyna deszyfrująca zwana bombą) przekazanych im w 1939 roku przez grupę Polaków kierowaną przez Mariana Rejewskiego, zajmujących się od pięciu lat skonstruowaniem maszyny deszyfrującej. Chociaż Brytyjczycy udoskonalili maszynę deszyfrującą otrzymaną od Polaków, pozostawała ona nadal maszyną mechaniczną i jej działanie nie nadążało za ciągle udoskonalanymi i zmienianymi przez Niemców egzemplarzami Enigmy. Ocenia się że w szczytowym okresie II wojny światowej Niemcy używali ponad 70 tysięcy maszyn szyfrujących Enigma. Prace nad maszyną deszyfrującą Enigmę przyczyniły się do powstania pod koniec wojny w Wielkiej Brytanii kalkulatorów elektronicznych. Powstało kilka wersji maszyny o nazwie Coloss, których głównym konstruktorem był T.H. Fowers. Były to już maszyny elektroniczne, w których wykorzystano arytmetykę binarną, sprawdzane były warunki logiczne (a więc można było projektować obliczenia z rozgałęzieniami), zawierały rejestry, mogły wykonywać programy (poprzez uruchomienie tablic rozdzielczych) i wyprowadzać wyniki na elektryczną maszynę do pisania. W 1941 roku Konrad Zuse ukończył w Niemczech prace nad maszyną Z3, która wykonywała obliczenia na liczbach binarnych zapisanych w reprezentacji, nazywanej dzisiaj zmiennopozycyjną, sterowane programem zewnętrznym
- 4. podawanym za pomocą perforowanej taśmy filmowej. Maszyna Z3 została całkowicie zniszczona w czasie bombardowania w 1945 roku. Następny model maszyny Zusego, Z4 przetrwał i działał do końca lat pięćdziesiątych. John von Neumann (1903 - 1957), z pochodzenia Węgier, był w swoich czasach jednym z najwybitniejszych matematyków. W 1946 roku zainspirował on prace w projekcie EDVAC (ang. Electronic Discrete Variable Automatic Computer), których celem było zbudowanie komputera bez wad poprzednich konstrukcji. Zaproponowano architekturę, zwaną odtąd von neumannowską, według której buduje się komputery do dzisiaj. W komputerze von Neumanna można wyróżnić przynajmniej następujące elementy: pamięć złożoną z elementów przyjmujących stan 0 lub 1, arytmometr zdolny wykonywać działania arytmetyczne, logiczne i inne, sterowanie, wprowadzanie danych i wyprowadzanie wyników. Program, czyli zbiór instrukcji, według których mają odbywać się obliczenia, jest wpisywany do pamięci. Kolejne rozkazy programu są pobierane przez jednostkę sterującą komputerem w takt centralnego zegara i rozpoznawane zgodnie z mikroprogramem wpisanym w układ elektroniczny. Postęp w elektronice umożliwił dalszy rozwój komputerów. W latach sześćdziesiątych lampy zastąpiono tranzystorami. Pierwszy tranzystorowy komputer zbudowano w 1956 roku w Massachusetts Institute of Technology. Z kolei układy scalone zastąpiły tranzystory (układ scalony zawierał w jednej obudowie kilkadziesiąt tranzystorów i innych elementów elektronicznych). Dalszy postęp produkcji tych układów pozwolił umieszczać w jednej kostce dziesiątki tysięcy tranzystorów. Obwody takie nazwano układami wielkiej skali integracji (VLSI z ang. - Very Large Scale of Integration). Wymyślono termin: generacja komputerów i nazwano komputery lampowe mianem pierwszej generacji, tranzystorowe - drugiej, zbudowane z układów scalonych - trzeciej, a w technologii VLSI komputerów odbywał się tak szybko, że zaczęto mówić o rewolucji komputerowej. Wprowadzenie na rynek tanich układów scalonych umożliwiło powstanie mikrokomputerów, w których elementy przetwarzające informacje umieszczono w jednym układzie - mikroprocesorze. Pierwsze komputery osobiste (PC z ang. Personal Computer) zostały opracowane przez IBM. Ponieważ firma ta nie miała nic przeciwko temu, by inne przedsiębiorstwa skorzystały z jej pomysłu i podążyły jej śladem, wielu producentów sprzedaje dziś własne komputery, które jednak są wciąż budowane według tej samej koncepcji firmy IBM. Ponieważ na rynku pojawiało się coraz więcej produktów, zaczęto pisać programy dla tego typu komputerów. Producenci sprzętu odpowiedzieli na to kolejną falą unowocześnionych komputerów typu IBM
- 5. - PC. Proces ten rozwijał się na zasadzie lawiny: komputery, nowe komponenty i oprogramowanie są obecnie tworzone przez setki najróżniejszych producentów. Tym sposobem PC stał się najbardziej rozpowszechnionym typem komputera na świecie. Niemal w tym samym czasie, którym narodził się PC, firma Apple zaczęła budować swój własny typ komputera osobistego, dzieło Steve Woźniaka i Steve Jobsa. System Apple nie był jednak zgodny z IBM - PC ani pod względem sprzętu, ani oprogramowania. Swój sukces zawdzięczał on faktowi, iż po raz pierwszy wykorzystano tam graficzny sposób komunikowania się z użytkownikiem bazujący na obrazkach i oknach - na rok przed rozpowszechnieniem się Windows firmy Microsoft. Komputery Apple od samego początku były systemami kompletnymi. Oznaczało to, że w ich przypadku nie było już konieczne kupowanie dodatkowych komponentów, aby na przykład osiągnąć dźwięk odpowiedniej jakości. W przeciwieństwie do ówczesnych komputerów PC komputery Apple były znacznie prostsze w obsłudze. Mac, jak chętnie nazywa się komputer firmy Apple, szybko stał się ulubionym narzędziem ludzi z kręgów twórczych. Używali go przede wszystkim architekci, muzycy i projektanci, którym najczęściej potrzebny był właśnie wydajny i łatwy w obsłudze komputer. Tak więc Mac wciąż pozostaje główną alternatywą dla komputerów typu IBM - PC, a fakt, iż w porównaniu z PC jest mniej dostępny na rynku, wynika głównie stąd, że firma Apple nie udostępniła nikomu praw do kopii swojego projektu. Większość producentów skorzystała co prawda z koncepcji peceta firmy IBM, niemniej niektórzy wyłamali się i podążyli własną drogą tworząc komputery osobiste niezgodne ze standardem. Stąd też oprogramowanie stworzone dla typowego komputera PC z reguły nie może być na nich uruchamiane. W zupełnym oderwaniu od standardu IBM - a powstały rozwiązania, które przewyższają pierwowzór czy to pod względem ceny, czy przydatności do gier, czy też obróbki dźwięku czy też grafiki. Niejeden z tego typu systemów był i wciąż jeszcze jest wspaniałym narzędziem, jednakże przeznaczonym wyłącznie dla specjalistów skupiających się na wykonywaniu określonej grupy zadań. Pierwsze komputery ważyły tony, miały znacznie mniejszą pamięć niż nowoczesne mikrokomputery oraz zużywały milion razy więcej energii. Płyta główna Wewnątrz obudowy komputera znajduje się płyta główna, która łącznie z procesorem decyduje o jakości komputera. Im lepsze są parametry płyty i procesora, tym szybszy jest komputer. Płyty nowszej generacji mają pamięć podręczną (cache memory). Jest to dodatkowa pamięć przyspieszająca współpracę z pamięcią dynamiczną RAM i dyskiem twardym. Do niedawna była ona wydzielana z pamięci operacyjnej komputera. Starsze modele płyt miały obok miejsca na procesor miejsce na koprocesor. Obecnie koprocesor jest wbudowany w procesor. Ponadto na płycie znajdują się pamięci RAM oraz ROM, gniazda rozszerzające (sloty) i związany z nimi standard magistrali komputera. Przez
- 6. magistrale odbywa się wymiana danych między procesorem a zainstalowanymi w komputerze kartami. Podstawową z nich jest karta graficzna. Inne karty rozszerzeń to: Sterowniki obsługujące dyski optyczne (CD-ROM), Sterowniki modemowe i faksowe, Sterowniki sieciowe pozwalające włączać mikrokomputer w struktury sieci w celu korzystania ze wspólnych jej zasobów, Sterowniki skanerów stacjonarnych, Sterowniki dźwiękowe umożliwiające wytwarzanie dźwięku HI-FI Inne wyspecjalizowane sterowniki np. przetworniki cyfrowo-analogowe i analogowo-cyfrowe. Kolejnym urządzeniem znajdującym się na płycie jest kontroler wejścia wyjścia zawierający sterowniki takich urządzeń jak: Stacja dyskietek Dyski twarde Złącza do komunikacji szeregowej (porty COM). Podłącza się do nich takie urządzenia jak mysz albo modem zewnętrzny Złącza komunikacji równoległej (centronics - drukarki) Starsze płyty nie miały takiego kontrolera, więc był on montowany w postaci karty rozszerzeń. Płyta z procesorem połączona jest za pomocą specjalnego gniazdka (Socket). Przez ostatnie półtora roku jedynym gniazdem łączącym procesor z płytą główną było Socket 7. Dziś jednak wybierać możemy między gniazdami Socket 7, Super 7, Slot 1, Socket 370, Slot A i Slot 2. Od rodzaju złącza procesora zależy możliwość ewentualnego przełożenia go do innej płyty głównej. Wszechstronność procesora w tym względzie zależy od liczby rodzajów płyt głównych obsługujących określony typ złącza. Socket 7: Popularność gniazda tego typu zmalała w 1997 roku wraz z wprowadzeniem przez Intela procesorów Pentium II ze złączem Slot 1. Powróciły one do łask z końcem 1998 roku, kiedy Intel zakończył produkcję procesorów Pentium MMX. Procesory produkowane w tym roku począwszy od Intela, poprzez AMD, IMB, IDT, Rise - mają gniazda Socket 7. Super 7: To poprawiona wersja złącza Socket 7, taktowana jest częstotliwością magistrali 100 MHz i obsługuje zarówno AGP jak i USB. Ze złączem Super 7 współpracują takie procesory, jak K6-2 firmy AMD (wersje 300 MHz i więcej), K6-3 tej samej firmy, procesor M II 333 firmy Cyrix oraz procesory Winchip 2 taktowane z częstotliwością 200, 233, i 266 MHz firmy IDT. Do gniazda Super 7 można wmontować wszystkie procesory przy-stosowane do gniazd Socket 7. Slot 1: Gniazdo do procesorów Pentium II, również Celeron, zarówno w wersji z jak i bez pamięci podręcznej drugiego poziomu (podręczna L2). Istnieje wiele modeli płyt głównych Slot 1. Procesory Pentium II produkowane są w dwóch wersjach różniących się od siebie technologią wytwarzania (0,35 lub 0,25 mikrona), częstotliwością taktowania magistrali (66 MHz lub 100 MHz) oraz rozmiarem pamięci buforowej (512 MB lub 4 GB). Warto pamiętać, że starsze procesory Pentium II taktowane są z częstotliwością do 333 MHz, podczas gdy nowa generacja procesorów Pentium II częstotliwością 350 MHz wzwyż. Płyta główna stanowi najważniejszy element całego komputera, stanowi bazę do instalowania pozostałych elementów komputera. To za jej pośrednictwem odbywa się wzajemna komunikacja między poszczególnymi zainstalowanymi w komputerze urządzeniami. Od jej rodzaju zależy jakimi możliwościami rozbudowy będzie dysponował komputer, jakie urządzenia będzie mógł obsługiwać oraz decyduje o wyborze komponentów z jakimi będzie mógł współpracować - rodzaj procesora, pamięci, kart rozszerzających czy obudowy. Z płyty głównej odchodzą
- 7. złącza dla modułów pamięci RAM (SIMM, DIMM lub RIMM), gniazd CPU, napędów dyskietek, urządzeń typu IDE lub EIDE, klawiatury czy monitora. STANDARD ATX Obecnie najbardziej popularnym standardem płyt głównych jest ATX. Charakteryzuje się on zintegrowanymi z płytą wszystkimi gniazdami wyprowadzeń. Złącza portów szeregowych i równoległych, klawiatury, myszy, USB czy IEEE są integralną częścią samej płyty co zwiększa jej funkcjonalność, ułatwia instalację i korzystnie wpływa na ujednolicenie standardu. Płyty wykonane w tym formacie mają bezpośrednio wlutowane gniazda portów, łatwo dostępne gniazda interfejsów dysków, co skutecznie eliminuje zbędną plątaninę kabli. W najnowszych płytach głównych, dzięki odpowiednim ustawieniom BIOS-u, możliwe jest włączanie komputera np. przez naciśnięcie odpowiedniej kombinacji klawiszy lub jednego z przycisków myszy. Dodatkowo płyty ATX wyposażone są w tzw. funkcję Soft Power (określaną również jako soft-off power), dzięki któremu płyta steruje włączaniem i wyłączaniem zasilania, co w przypadku długiej bezczynności pozwala komputerowi samemu się wyłączyć oszczędzając w ten sposób energię. Mechanizm Soft Power daje możliwość kontrolowania zasilania z poziomu systemu operacyjnego. Standard ATX posługuje się również lepszym sposobem chłodzenia. Mamy tu do czynienia zarówno z nawiewem powietrza do wnętrza obudowy, jak i jego wywiewem. Powoduje to znacznie lepszą wymianę powietrza wewnątrz obudowy a tym samym lepsze chłodzenie wszystkich elementów komputera. Płyty w standardzie ATX wymagają zgodnej z nią obudowy w tym samym standardzie. Wewnętrzne gniazda Na płycie głównej znajduje się szereg różnych typów złączy opracowanych według określonego standardu (Open architecture) gwarantującego że wszystkie urządzenia pochodzące od różnych producentów (zgodne ze standardem PC) będą mogły prawidłowo ze sobą współpracować. Za pomocą magistrali, którą podzielić możemy na dwa rodzaje: zewnętrzną odpowiadającą za komunikację systemu z urządzeniami zewnętrznymi, oraz wewnętrzną sprawującą kontrolę nad urządzeniami wewnętrznymi. Patrząc zatem na płytę główną możemy znaleźć na niej następujące złącza: PCI - (ang. Peripheral Component Interconnect) stanowi nowoczesny standard gniazd rozszerzeń dla kart przystosowanych pod tą architekturę. Wprowadzona w 1993 r. przez firmę Intel specyfikacja szyny PCI spełnia normy standardu Plug & Play. Najczęściej obecnie stosowana jest 32 bitowa szyna systemowa (synonim określenia PCI32 [szerokość magistrali]) występująca na płytach głównych w postaci białych podłużnych złącz. 32 bitowa PCI może pracować z zegarem 33 MHz (synonim określenia PCI33 [częstotliwość magistrali]) i osiągać przepustowość rzędu 133 MB/s (wartość tą musi jednak dzielić pomiędzy wszystkie karty rozszerzające). W 2000 r. wprowadzono unowocześnioną, 64 bitową wersję tej magistrali (synonim określenia PCI64 [szerokość magistrali])
- 8. mogącą pracować z zegarem 66 MHz (synonim określenia PCI66 [częstotliwość magistrali]). Unowocześniona wersja PCI może osiągać przepustowość rzędu 266 MB/s Gniazda PCI zasilane są standardowo napięciem 5 V. Gniazda PCI są wykorzystywane przede wszystkim do instalacji kart graficznych, muzycznych, sieciowych lub wewnętrznych modemów. ISA lub AT BUS - (ang. Industry Standard Architecture) 16 bitowa magistrala danych w komputerach klasy PC umożliwiająca montowanie dodatkowych kart rozszerzeń opracowanych pod tego typu gniazdo. Ten rodzaj złącza wychodzi powoli z użycia głównie z powodu małej przepustowości 8,33 Mb/s i braku obsługi standardu Plug & Play, jednak z powodu znacznej popularności w ubiegłych latach, a co za tym idzie dużej liczbie obecnych jeszcze na rynku urządzeń, przystosowanych na to gniazdo, jest ono jeszcze montowane na płytach głównych. AGP - to opracowany przez firmę Intel interfejs komunikacyjny mający na celu zwiększenie przepustowości kart graficznych. Technologia ta pozwala karcie graficznej opracowanej w tym standardzie korzystać bezpośrednio z wydzielonego obszaru pamięci operacyjnej RAM w taki sposób jakby korzystała ona z własnej pamięci podręcznej. Istnieją trzy rodzaje kart AGP gdzie przepustowość danych może osiągnąć różne wartości: 1x - (66 MHz) gdzie przepustowość może wynosić maksymalnie 266 MB/s, 2x - (66 MHz) gdzie dane mogą być przesyłane zarówno podczas fazy wschodzącej jak i opadającej sygnału przez co praktyczna szerokość pasma ulega podwojeniu do 533 MB/s i 4x - (100 MHz) gdzie karta potrafi transmitować cztery bity informacji przy jednym takcie zegara, co pozwala na uzyskanie teoretycznej przepustowości rzędu 1066 MB/s. AMR, CNR lub PTI to gniazda opracowane przez firmę Intel i przeznaczone do osadzania specjalnych kart, spełniających rolę wyprowadzeń dla elementów wbudowanych w chipset. Odpowiednia karta AMR udostępnia funkcje modemu lub karty dźwiękowej, PTI umożliwia podłączenie urządzeń TV, wyświetlaczy LCD itp., a CNR kart sieciowych, dźwiękowych. Gniazda umożliwiające instalację modułów pamięci RAM. W zależności od typu, liczby gniazd i chipsetu określana jest graniczna ilość pamięci, jaką można zainstalować na danej płycie. Spośród wielu różnych rodzajów tego typu gniazd, najbardziej popularne są już tylko 32 bitowe gniazda typu SIMM (ang. Single In- Line Memory) wyposażone w 72 styki, oraz 64 bitowe gniazda DIMM (ang. Dual In-Line Memory Module) wyposażone z kolei w 168 styków lub RIMM. Wiele z obecnych na rynku płyt głównych to tzw. płyty zintegrowane (tzw. all in one). Oznacza to, że na płycie, oprócz jej własnych układów sterujących, znajdują się także układy innych urządzeń, takich jak np. karty graficznej, kontrolera SCSI, modemu, karty dźwiękowej (PC 97) i innych, których wyprowadzenia (gniazda) znajdują się również obok portów komunikacyjnych (LPT, COM, etc.). Płyty tego typu mają zarówno swoje zalety jak i wady. Do zalet zaliczyć można zwykle niższą cenę gdyż kupując poszczególne urządzenia osobno (kartę dźwiękową, kartę graficzną etc.) należałoby przeznaczyć na zakup komputera znacznie
- 9. większą kwotę a tak wszystko mamy od razu zintegrowane na płycie. Wadą zintegrowanych płyt jest natomiast to że użytkownik przywiązany jest już ostatecznie do konkretnych modeli urządzeń (rozwiązań technologicznych), które starzeją się bardzo szybko a z uwagi że są na stałe zespolone z płytą główną nie da się ich już wymienić. Nowoczesne płyty główne, oprócz łatwej instalacji, oferują także wiele udogodnień ułatwiających pracę oraz zapobiegających awariom. Część płyty np. wyposażona jest w czujniki mierzące temperaturę. Jest ona mierzona w dwóch lub nawet trzech punktach: wewnątrz obudowy komputera lub na układzie chipsetu, na procesorze oraz w dowolnym, wybranym przez użytkownika miejscu, np. w okolicach twardego dysku. Pomiar temperatury pozwala płycie głównej sterować wentylatorami do niej podłączonymi, w tym - wentylatorem procesora, zasilacza oraz dodatkowym wentylatorem wewnątrz obudowy. Płyta sama określa, kiedy włączać i wyłączać wiatraczki lub zmienić ich prędkość obrotową zależnie od temperatury. Bardzo eksponowaną cechą nowoczesnych płyt głównych jest ich energooszczędność, a konkretnie mechanizmy pozwalające zminimalizować niepotrzebne zużycie prądu, a przy okazji i komponentów komputera. Mechanizmy te umożliwiają np. przejście monitora, twardego dysku, procesora, pamięci i innych komponentów w stan spoczynku, na czas gdy nie są one używane. Oczywiście nie powoduje to utraty danych, gdyż są one archiwizowane w postaci fotografii systemu w specjalnym miejscu na dysku (suspend to disk) lub w pamięci (suspend to memory) i odtwarzane do postaci sprzed uśpienia na każde żądanie użytkownika. Na każdej płycie głównej musi być przynajmniej jedno gniazdo procesora. Producenci wyposażają swoje płyty w różne wersje gniazd umożliwiających zastosowanie jednego z dostępnych procesorów, przy czym rodzaj procesora często zależy również od zainstalowanego na płycie chipsetu. Najczęściej obecnie spotykanym gniazdem montowanym na płytach głównych jest gniazdo typu Socket. Gniazda te umożliwiają łatwą instalację procesora bez użycia siły, wyposażone są bowiem w małą dźwigienkę, służącą do zaciskania lub poluzowania znajdującego się w gnieździe procesora. OTO KILKA PŁYT DOSTĘPNYCH NA RYNKU: Płyta główna Via P4PB 400-L (Via P4X 400) Jedna z najszybszych płyt formatu ATX. Zbudowana w oparciu o chipset VIA P4X400 oraz VT8235. Zapewnia obsługę pamięci typu DDR333 DIMM aż do 3 GB. Obsługuje dyski ATA 133 i USB 2.0. Ma zintegrowaną 6-cio kanałową kartę muzyczną AC'97, kartę sieciową VIA VT6105M, zaawansowane funkcje Overclockingu oraz złącza Smart Card Reader i System Intrusion. Przeznaczona dla 478-pionowych procesorów Intel Pentium 4 oraz Celeron S478. Ma gniazdo procesora Socket 478, trzy gniazda pamięci typy obsługiwanej pamięci DDR333, DDR266, DDR200. Maksymalna pojemność 3072 MB. Złącze AGP 8x, pięć złączy PCI, jedno złącze CNR. Standard kontrolera ATA/133 (2) Dodatkowy kontroler
- 10. USB 2.0 Porty zewnętrzne 2xPS/2, 2x COM, 1x LPT, 2x USB, 1x RJ45, Audio. Standard płyty ATX. Intel Desktop Baytown D845PEBT2 Płyta zbudowana została na chipsecie Intel 845PE i obsługuje procesory z rodziny Pentium 4 i Celeron S478 (również nowe układy z technologią Hyper-Threading). Nowa płyta Intel D845PEBT2 jest pierwszą w historii firmy tak rozbudowaną konstrukcją przeznaczoną dla entuzjastów i graczy. Płyta wyposażona jest w kontroler ATA/100 (ICH4), USB 2.0, kontroler Serial ATA ze wsparciem macierzy Raid poziom 0 i 1, kartę sieciową i świetny układ dźwiękowy z technologią SoundMax Candeza (wyjścia cyfrowe i analogowe). Intel Desktop D845PEBT2 współpracuje także z pamięcią DDR333 Ma gniazdo Socket 478, obsługuje procesory Pentium 4, Celeron S478. Ma dwa gniazda pamięci i obsługuje pamięci DDR333, DDR266, DDR200. Maksymalna pojemność pamięci to 1024 MB. Na płycie są 4 złącza AGP, 5 złączy PCI. Standard kontrolera ATA/100 (2). Porty zewnętrzne 2xPS/2, 1x COM, 1x LPT, 4x USB, 1x RJ45, Audio. Standard płyty ATX. Asus P4SDX SiS 655 +LAN Płyta ma gniazdo procesora Socket 478 obsługuje procesory Pentium 4, Celeron S478 chipset SiS 655 Magistrala FSB 400MHz, 533MHz ma 4 gniazda pamięci obsługuje DDR200, DDR266, DDR333. Maksymalna pojemność to 4096 MB. 8x złącze AGP, 6x złącze PCI, standard kontrolera ATA/133 (2), na płycie zintegrowana jest karta sieciowa i karta graficzna Dodatkowe kontrolery USB 2.0. Porty zewnętrzne 2xPS/2, 1x COM, 1x LPT, 4x USB, 1x RJ45, Audio SPDIF out. Standard płyty ATX Magistrale danych PC Bus (XT Bus) Skonstruowany przez IBM standard magistrali PC Bus był pierwszą szyną danych, opracowaną dla komputerów PC. Szyna ta taktowana była częstotliwością 4,77 MHz i miała szerokość 8 bitów. AT-Bus Nazywana także ISA Bus - 16-bitowa magistrala danych, taktowana zegarem 8 MHz, zaprojektowana przez firmę IBM dla komputerów z procesorem 286. Szyna EISA (Extended Industry Standard Architecture) Magistralę EISA zaprojektowano specjalnie dla 32-bitowych komputerów z procesorem 386. Aby zapewnić jej kompatybilność z szyną ISA, taktowana jest zegarem 8,33 MHz. Dość duża prędkość transmisji danych nie jest tyle rezultatem częstotliwości taktowania, co szerokości szyny. Microchannel (MCA - Micro Channel Architecture) IBM skonstruował tę 32-bitową magistralę specjalnie dla komputerów z procesorami 386. Taktowana jest ona zegarem 10 MHz i z tego względu nie jest kompatybilna z kartami typu ISA. Architektura ta nie ma już obecnie żadnego znaczenia. Local Bus, Vesa Local Bus (VL Bus) System Local Bus pojawił się na rynku PC po raz pierwszy w połowie 1992 roku kiedy to konsorcjum VESA ustaliło standardową specyfikację tej magistrali, nazywaną VL Bus. Chodzi tutaj o 32-bituwą szyną danych, która jednak w
- 11. przeciwieństwie do EISA Bus taktowana jest z zewnątrz z częstotliwością, zegara procesora. Karty współpracujące z magistralami ISA lub XT nie są w stanie sprostać wymaganiom stawianym przez zegary taktowane większymi częstotliwościami niż 10 MHz. Aby nie trzeba było takich kart wymieniać, projektanci płyt głównych systemów Local Bus zatroszczyli się o odpowiednie dla nich 16-bitowe. Za pomocą specjalnego interfejsu są one łączone z procesorem i taktowane zegarem 8 MHz. Dzięki takiemu rozwiązaniu system Local Bus jest w pełni kompatybilny ze starymi kartami rozszerzającymi ISA. Wedle definicji standardu VESA na płytce głównej każdego komputera z magistralą Local Bus jest w pełni kompatybilny ze starymi kartami rozszerzającymi ISA. Wedle definicji standardu VESA na płytce głównej każdego komputera z magistralą Local Bus powinny znajdować się 3 gniazda dla jej kart rozszerzających. Sloty szyn Local Bus zostały podobnie jak to miało miejsce przy rozbudowie magistrali PC Bus do AT Bus, wydłużone. Dlatego też gniazda kart tego typu są trzyczęściowe. Do dwuczęściowego rozszerzenia 16- bitowego dołączono kolejne złącze przeznaczone dla kart 32-bitowych. PCI (Peripherial Component Interconnect) Magistrala PCI Local Bus po raz pierwszy zaprezentowana została publicznie w czerwcu 1992 r. Przedstawione rozwiązanie umożliwia błyskawiczną komunikację pomiędzy procesorem i kartami w gniazdach rozszerzeń PCI. Nie ma przy tym znaczenia, czy w takim gnieździe zainstalowana jest karta sterownika dysków, sieciowa, graficzna czy multimedialna. Każda karta, pasująca do gniazda PCI, będzie w nim pracować bez jakichkolwiek problemów związanych z kompatybilnością, gdyż nie tylko sygnały ale i przeznaczenie poszczególnych styków gniazda są znormalizowane. Operacje wejścia wyjścia, jak w przypadku szyn ISA, EISA i Microchannel, ale mikroprocesor sam odwołuje się do urządzeń zewnętrznych i robi to równie szybko, jak podczas odwołań do pamięci operacyjnej. W przeciwieństwie do innych magistrali lokalnych, przykładowo VESA Local Bus, która początkowo była stosowana tylko do przyspieszenia operacji graficznych, szyna PCI stanowi kompleksowe rozwiązanie, przyspieszające współpracę z dowolnych urządzeniem zewnętrzny. Przy częstotliwości taktowania 33 MHz i szerokości 32 bitów magistrala PCI osiąga szybkość transmisji 132 MB/s. Nawet jeżeli szerokość szyny adresowej i danych nowych procesorów zwiększy się z 32 na 64 (jak tak to ma miejsce w przypadku Pentium), zmiany te nie wpływają na architekturę PCI. Przepustowość magistrali podwoi się wtedy do 264 MB/s, ale kompatybilność 32 i 64-bitowych urządzeń peryferyjnych standardu PCI pozostanie zapewniona. Ponieważ karty dołączone do szyny PCI mogą się komunikować nawet bez udziału mikroprocesora, ma on więcej czasu na przeprowadzenie skomplikowanych obliczeń, przez co może być o wiele ekonomiczniej wykorzystywany. Dla każdej karty zdefiniowane są tzw. rejestry konfiguracyjne. Przy ładowaniu systemu procesor odczytuje zapisane w nich dane i rozpoznaje, jaka karta jest umieszczona w danych gnieździe. Instalacja i inicjacja karty następuje potem w pełni automatycznie. Aby zapewnić zarówno producentom, jak i użytkownikom możliwie dużą elastyczność, w standardzie PCI zdefiniowano tzw. gniazdo wspólne (shared slot). Jest to gniazdo, które mogłoby zostać wykorzystywane w magistrali ISA, EISA czy Microchannel. Gniazdo takie
- 12. akceptuje albo zwykłe karty rozszerzające, albo karty PCI, które oprócz PCI obsługują także wymienione wyżej standardy. Ponieważ taka karta PCI będzie funkcjonować w każdej ze wspomnianych trzech magistrali, producenci mogą dla wszystkich ich typów produkować tylko jeden rodzaj karty. Bardzo istotną cechą architektury PCI jest skalowalność: w jednym i tym samym komputerze może być równolegle lub szeregowo połączonych kilka magistrali PCI. Ponieważ nad koncepcją PCI Local Bus pracowało wielu znaczących producentów komputerów, pojawiło się dużo dobrych pomysłów. Przykładowo, rozwiązanie jest na tyle elastyczne, że uwzględnia możliwość współpracy magistrali nie tylko z komputerami wyposażonymi w procesory firmy Intel, ale również z AMD, Cyrix. Ogólnie rzecz biorąc PCI Local Bus jest tanią (co nie znaczy gorszą) alternatywą nie tylko dla maszyn typu Desktop, ale także dla komputerów przenośnych, inżynierskich stacji roboczych oraz serwerów sieciowych. Zegar Jednym z istotnych elementów płyty głównej jest zegar przeznaczony do odmierzania czasu i realizacji różnego rodzaju funkcji liczących. Poszczególne kanały układu zegara pełnią w mikrokomputerze standartowe funkcje. I tak: Wyjście kanału 0 jest podłączone do linii przerwania IRQ 0. Oznacza to, że kanał ten używany jest do sterowania (zwiększania) zegara czasu systemowego, Wyjście kanału 1 używane jest jako sygnał okresowego wytwarzania sygnału zadania danych do kanału DMA odpowiedzialnego za odświeżanie zawartości pamięci operacyjnej, Wyjście kanału 2 podłączone jest do głośnika umieszczonego wewnątrz mikrokomputera i służy do wytwarzania dźwięków o różnych częstotliwościach. Wyjście kanału 0 steruje przerwaniem IRQ 0, więc bieżący czas dzienny jest modyfikowany co każde 55 mikrosekund. Jeżeli chcemy zrezygnować z systemowej obsługi zegara na rzecz innego wykorzystania przerwania IRQ 0 to możemy przeprogramować kanał 0. Nie należy jednak tego czynić w sytuacjach, w których zamierzamy używać jednocześnie stacji dyskietek, gdyż przerwanie IRQ 0 wykorzystywane jest do sterowania silnikiem stacji dyskietek. Kanał 1 pobudza mechanizmy DMA co każde 15 mikrosekund. Kanału tego nie wolno przeprogramowywać, gdyż może to spowodować utratę danych z pamięci operacyjnej. Kanał 2 jest przeznaczony do wykorzystania w dowolny sposób. Przeprogramowywanie kanału 2 może być wykorzystywane do tworzenia różnego rodzaju efektów akustycznych. Możliwe jest także odłączenie wyjścia kanału 2 od głośnika. Procesor Najważniejszym elementem komputera jest procesor. Steruje on pracą komputera, wykonuje operacje logiczne i arytmetyczne podczas realizacji programów. Zestaw funkcji wykonywanych przez procesor jest na tyle szeroki, że nie jest on w stanie samodzielnie obsługiwać wszystkich współpracujących z nim podzespołów. Z tego powodu działa-nie procesora wspomagane jest przez liczne układy sterujące, będące najczęściej wyspecjalizowanymi mikroprocesorami. Wykonywanie funkcji wspomagających procesor wymusza zastosowanie odpowiednich mechanizmów współpracy pomiędzy procesorem
- 13. i układami wspomagającymi. Z jednej strony procesor musi mieć możliwość oddziaływania na podzespoły wspomagające w przypadkach, w których podzespoły te mają wykonywać określone przez procesor zadania. Oddziaływanie w tym kierunku jest względnie proste, gdyż to procesor, czyli główny podzespół zarządzający pracą komputera, zleca wykonywanie odpowiednich za-dań. Z drugiej strony, podzespoły wspomagające muszą mieć możliwość sygnalizowania procesorowi swoich stanów w nieznanych dla procesora chwilach czasu. Komunikacja w tym kierunku nie jest już taka prosta. Należy bowiem pamiętać, że procesor przez większość czasu pracy zajęty jest realizowaniem zadań postawionych przez użytkownika. W tej sytuacji konieczne jest wprowadzenie mechanizmów, które pozwolą zasygnalizować procesorowi konieczność zainteresowania się stanem określonego podzespołu wspomagającego pracę procesora. Podstawowym mechanizmem wykorzystywanym przez podzespoły do sygnalizowania procesorowi swoich stanów jest mechanizm przerwań. Mechanizm przerwań oprócz podanej powyżej funkcji, wykorzystywany jest także przez sam procesor dla potrzeb sygnalizacji pewnych sytuacji wyjątkowych (np. dzielenie przez zero, przepełnienie przy operacjach arytmetycznych). Sprawą oczywistą jest, że niezależnie od rodzaju przerwania jego obsługą musi zająć się procesor jako jedyny pod-zespół realizujący w komputerze programy (także obsługi przerwań). Przerwania dzielą się na: Przerwania sprzętowe - wytwarzane przez podzespoły wspomagające pracę procesora, Przerwania wyjątkowe - wytwarzane przez procesor, Przerwania programowe - ich źródłem są wykonywane przez procesor programy. Procesor w trakcie przetwarzania pobiera kolejne instrukcje z pamięci operacyjnej, rozpoznaje je i wykonuje z wykorzystaniem wskazanych w instrukcjach operandów (jeżeli takowe w instrukcji występują). Zalecane przez program instrukcje powodują wykonywanie funkcji sterujących, arytmetycznych i logicznych a wymagana wysoka efektywność pracy procesora wymusza wbudowanie w jego struktury wewnętrznych pamięci (o niewielkich pojemnościach) nazywanych rejestrami. Wymienione powyżej podzespoły połączone są poprzez magistrale komunikacyjne. W strukturze mikroprocesora wyróżnia się następujące elementy: Układ przechowujący kolejkę instrukcji - procesor bardzo szybki realizuje większość z zlecanych instrukcji, czyniąc to o wiele szybciej niż jest w stanie uzyskać kolejną, instrukcję z pamięci operacyjnej. Dla usprawnienia pracy instrukcje sprowadzane są, z pamięci operacyjnej do procesora porcjami (a nie po jednej) i gromadzone są w kolejności w tym układzie. Tego rodzaju rozwiązanie zmniejsza w istotny sposób prawdopodobieństwo przestoju procesora powodowane-go koniecznością oczekiwania na kolejną instrukcję. Urządzenie sterujące wykonywaniem instrukcji - zarządza kolejką instrukcji oczekujących na wykonywanie pobierając kolejne instrukcje z układu przechowującego kolejkę instrukcji i przekazując ją do urządzenia wykonującego - instrukcje. Urządzenie arytmetyczno-logiczne Jest podstawowym składnikiem urządzenia wykonującego instrukcje. Realizuje wszystkie operacje arytmetyczne i logiczne. Niektóre skutki tych operacji (a dokładnie stan ich wykonania) powodują ustawienie przez to urządzenie odpowiednich wartości w rejestrze flagowym. Zespół rejestrów - stanowią jeden z najważniejszych składników procesora. Służą do bieżącego przechowywania
- 14. danych w obrębie procesora oraz pełną funkcję wspomagające procesy współpracy procesora z pamięcią operacyjną i innymi podzespołami mikrokomputera. Zespół rejestrów segmentowych - specjalnego przeznaczenia przy dostępie do odpowiednich fragmentów pamięci operacyjnej. Specjalnego przeznaczenia rejestr IP - wskazujący adres następnej instrukcji, którą ma wykonać procesor. Rejestr flagowy - zapamiętuje i udostępnia informacje o stanie operacji przez urządzenie arytmetyczno-logiczne. Szybkość pracy procesora podawana jest w MHz i określa ona prędkość przetwarzania danych przez procesor. Im większa prędkość tym szybszy a zarazem lepszy procesor. Prędkość procesorów ciągle się zwiększa, zmienia się ich budowa, jednak zachowują one kompatybilność z dotychczasowym standardem. Pozwala to na stosowanie ich do istniejącego już oprogramowania. Procesory Pentium zbudowane są w oparciu o technologię 0,8 mikrometra i składają się z milionów tranzystorów bipolarnych. Charakterystyczne cechy, które odróżniają procesory od siebie to: - architektura (CISC lub RISC) - liczba bitów przetwarzana w jednym takcie - częstotliwość taktowania podawana w MHz Wszystkie współczesne procesory mają podobną architekturę opartą na superskalarnym jądrze RISC (architektura procesora o uproszczonej liście rozkazów). Jeszcze kilka lat temu procesory zaliczano do rodziny CISC (architektura procesora wykorzystująca złożoną listę rozkazów). Dzisiaj, dzięki zastosowaniu w nich techniki przekodowywania rozkazów, uzyskano ogromne zwiększenie wydajności procesora, a RISC-owa konstrukcja umożliwia stosowanie wysokich częstotliwości zegara. ZASADA DZIAŁANIA: Ze względu na przepływ danych i rozkazów w procesorze, można wyróżnić w nim kilka zasadniczych modułów: 1. - Blok wstępnego pobierania i dekodowania instrukcji. Odpowiada on za dostarczenie kolejnych poleceń z pamięci operacyjnej i przekazanie ich do odpowiedniej jednostki wykonawczej. 2. - Główny blok wykonawczy to jednostka arytmetyczno-logiczna ALU. Zapewnia ona prawidłowe przetworzenie wszystkich danych stałoprzecinkowych. ALU wyposażony jest w niewielką zintegrowaną pamięć, nazywaną zestawem rejestrów. Każdy rejestr to pojedyncza komórka używana do chwilowego przechowywania danych i wyników. 3. - FPU, czyli koprocesor wykonujący wszystkie obliczenia zmiennoprzecinkowe 4. - Po zakończeniu obliczeń dane będące wynikiem przetwarzania trafiają do modułu wyjściowego procesora. Jego zadaniem jest przekierowanie
- 15. nadchodzących informacji np. do odpowiedniego adresu w pamięci operacyjnej lub urządzenia wejścia/wyjścia. DODATKI MULTIMEDIALNE: Producenci nowoczesnych procesorów za podstawowy kierunek rozwoju technologicznego obrali rozszerzenie multimedialnych możliwości układu. Poszerzone listy rozkazów operujące na stało- i zmiennoprzecinkowych macierzach znacząco przyspieszają obróbkę grafiki, dźwięku czy generowanie obrazów 3D. MMX Pierwszym wprowadzonym rozszerzeniem multimedialnym, wbudowanym we wszystkie obecnie produkowane modele procesorów, jest zestaw 57 instrukcji arytmetyki stałoprzecinkowej typu SIMD, znany pod nazwa MMX. 3DNow! Firma AMD wprowadziła 21 nowych instrukcji zmiennoprzecinkowych typu SIMD- FP zorientowanych na wspomaganie grafiki trójwymiarowej. Był to pierwszy przypadek wprowadzenia tak istotnych zmian do architektury procesora przez firmę inną niż Intel SIMD-FP procesorów AMD wykorzystuje do działania połączone w pary 64-bitowe rejestry MMX - co niestety, utrudnia automatyczna optymalizacje kodu programu, gdyż wymagany jest podział danych na dwa segmenty. SSE Również Intel wprowadził w swoich procesorach Pentium III, instrukcje zmiennoprzecinkowe SIMD-FP. Instrukcje te są wykonywane przez wyspecjalizowana jednostkę operującą na ośmiu 128-bitowych dedykowanych rejestrach - co sprzyja optymalizacji kodu programu. NOWOŚCI: Procesory Intel Pentium 4 to najbardziej zaawansowane i najwydajniejsze konstrukcje firmy Intel przeznaczone do komputerów typu desktop. Ta nowa generacja procesorów, zaprojektowana z myślą o dostarczeniu klientom przełomowej technologii, zapewnia najwyższą wydajność pracy dzisiejszych, ale także przyszłych programów komputerowych. Możliwości procesora Intel Pentium 4 najlepiej wykorzystają zwłaszcza te programy, które przetwarzają w czasie rzeczywistym zaawansowane dane multimedialne, na przykład filmy video, muzykę i realistyczną grafikę trójwymiarową. Jeśli planowane jest używanie komputera do bezpiecznej komunikacji w czasie rzeczywistym przez Internet (VoIP, telekonferencje), do współpracy z wieloma urządzeniami dostarczającymi cyfrowe dane do komputera (kamerami cyfrowymi, odtwarzaczami MP3 i DVD, aparatami cyfrowymi) lub w domu do gier, to powinno się wybrać komputer właśnie z procesorem Pentium 4
- 16. OTO KILKA PROCESORÓW DOSTĘPNYCH NA RYNKU: Intel Celeron 1800 MHz BOX (Wilamette) Jest to procesor typu Celeron S478 o gnieździe SOCKET 478 jego proces technologiczny to Willamette (0,18) częstotliwość taktowania procesora wynosi 1800 MHz a częstotliwość taktowania magistrali 400 MHz pojemność pamięci cache 128 kb wersja produktu BOX ma dołączony wentylator. AMD Athlon XP 2000 + BOX Procesor Athlon ma gniazdo typu SOCKET A częstotliwość taktowania tego procesora wynosi 1667 MHz, a częstotliwość taktowania magistrali 266 MHz pojemność pamięci cache 256 kb Jest to wersja BOX ma dołączony wentylator Systemy oparte na procesorach AMD Athlon pozwalają użytkownikowi osiągnąć jeden z najwyższych poziomów wydajności wykonywania programów. Procesory AMD Athlon dostarczają najwyższej wydajności dla wymagających aplikacji komputerów biurkowych, przenośnych, stacji roboczych oraz serwerów. Intel Pentium 4 (S478) 3.00 GHz HT BOX (FSB 800) Procesor Pentium 4 ma gniazdo typu Socket 478 oraz proces technologiczny Northwood (0,13). Częstotliwość taktowania tego procesora wynosi 3000 MHz, a częstotliwość taktowania magistrali 800 MHz pojemność pamięci cache 512 kb ma dołączony wentylator i jest to wersja produktu BOX. Procesor ten wyposażony jest w innowacyjną technologię Hyper-Threading polega ona na tym, że platforma wyposażona w procesor Pentium 4 z Hyper-Threading będzie zachowywać się tak jakby była wyposażona w dwa procesory. Wątki i zadania rozkładane są na dwa logiczne procesory, zapobiegając tym samym zatykaniu procesora przez jedną aplikacje. Przykładowo Adobe Photoshop przy zastosowaniu tej technologii działa o 23% szybciej w czasie, gdy jednocześnie działa skaner programu antywirusowego. Zaprojektowany w architekturze Intel NetBurst procesor Pentium 4 oferuje jeszcze wyższą niż dotychczas moc obliczeniową. Utworzony w oparciu o technologię 0,13 mikrometra oraz magistralę 800 MHz procesor Pentium 4 zapewnia znaczny skok wydajności. Jest to pierwsza tak poważna zmiana struktury procesora od 1995 roku. Nowa architektura NetBurst pozwala produkować procesory o częstotliwości powyżej 2 GHz, a w przyszłości pozwoli zbudować procesory pracujące z częstotliwością nawet 10 GHz. Składające się na nią rewolucyjne rozwiązania pozwoliły procesorom Intel Pentium 4 na zdobycie kilkuset megahercowej przewagi nad produktami konkurencji. Szeroka gama chipsetów przeznaczona dla procesora Intel Pentium 4 pozwala na budowanie zarówno najwydajniejszych komputerów pracujących z pamięciami RDRAM
- 17. (chipset i 850), jak również ekonomicznych rozwiązań opartych na popularnych pamięciach SDRAM (chipset i 845). Koprocesor Płyty główne starszej generacji mają podstawkę dla opcjonalnego koprocesora przyspieszającego pracę komputera: 8087 (dla XT0), 80287 (dla AT), 80387 (dla 386), 80487SX (dla 486SX). Od 486 DX/DX2/DX4 koprocesor wbudowany jest wewnątrz procesora. Koprocesory charakteryzują się architekturą oraz częstotliwością pracy podobnie jak procesory i przyspieszają wykonywanie złożonych obliczeń numerycznych lub opracowanie grafiki. Obecnie wszystkie produkowane procesory zawierają w sobie koprocesor, jednak gdybyśmy mieli płytę starszego typu to przy doborze koprocesora należy trzymać się zaleceń producenta płyty głównej, który przeważnie podaje jakiego rodzaju koprocesor należy zamontować na danej płycie. Banki pamięci Scalone pamięci operacyjne nie mogą być instalowane na płycie głównej w dowolny sposób, lecz zgodnie z pewną organizacją. Z tych względów pamięci scalone najczęściej produkowało się w postaci kostek o odpowiedniej pojemności przeznaczonych do zapamiętywania pojedynczego bitu danych, czyli np. jednostka 64 kilobity. Dla organizacji pamięci w strukturze bajtowej wymagana jest instalacja ośmiu tego rodzaju kostek. Dziewiątą, kostkę (także w organizacji jednobitowej) instaluje się dla potrzeb przechowywania bitu parzystości wykorzystywanego do kontroli poprawności każdego bitu. W ten sposób pojedyncza komórka pamięci realizowana jest przez dziewięć układów scalonych stanowiących tzw. banki pamięci. Pamięć operacyjna może być obsadzana wyłącznie pełnymi bankami. Oznacza to, że instalacja 9-ciu układów scalonych o pojemności 64 kilobity (czyli obsada jednego banku) pozwala uzyskać pamięć o pojemności 64 kilo bitów. W tym przypadku kolejny bank może być obsadzony grupą 9- ciu układów scalonych rozszerzając pojemność pamięci np. do 128 KB. Inną wersją scalonych pamięci operacyjnych są układy o organizacji 4-bitowej. W tym przypadku pojedynczy bank obsadzany jest trzema układami scalonymi (2x4+1 na bit parzystości). Omawiane układy scalone nazywane są układami typu DIP. Obecnie powszechnie stosuje się do organizacji pamięci układy typu SIMM. Są to listewki drukowane na których fabrycznie zainstalowane są układy scalone zorganizowane w struktury 9-cio (8+1), 18 (2x8+2), czy też 72-bitowe (8x8+8) w postaci odpowiedniej liczby kostek pamięci (9 lub 3). Pamięć SIMM może być osadzona kostkami o różnych pojemnościach (np. 1 Mx9 bitów=1 MB, 4 Mx9 bitów - 4 MB itd.). W obsadzaniu pamięci operacyjnej elementami typu SIMM obowiązują te same zasady co omówione poprzednio - płytę należy obsadzać bankami Dla przykładu, wykorzystując SIMM-y o pojemności 1 MB możemy zorganizować cztery banki pamięci (pojemność 4 MB) lub osiem banków pamięci (8 MB). Z kolei używając SIMM-ów o pojemności 4 MB możemy zorganizować banki pamięci o pojemności 16 MB (4xSIMM), 32 MB (8xSIMM). Natomiast
- 18. używając mieszanych SIMM-ów możemy realizować pamięci o pojemnościach np. 20 MB (4x4+4x1 MB). W tym miejscu należy zaznaczyć, że stosowane pamięci muszą mieć te same parametry a ponadto czasami stosowane są płyty główne bez kontroli parzystości. W tym przypadku pojedynczy bajt jest realizowany z ośmiu układów scalonych jednobitowych bądź dwóch układów scalonych 4-ro bitowych. Typy pamięci PAMIĘĆ OPERACYJNA Jest to pamięć RAM (ang. Random Access Memory), czyli pamięć o swobodnym dostępie (tzn. odczytanie lub zapisanie pojedynczej porcji informacji w dowolnym miejscu jest jednakowo łatwe i trwa tyle samo czasu). W czasie pracy komputera są w niej umieszczane informacje będące bieżącym obiektem przetwarzania. Z pamięci operacyjnej wyodrębnia się pamięć buforową, która jest wykorzystywana do przyspieszania wymiany większej ilości informacji. Z RAM-u procesor czerpie informacje, a także przesyła wyniki swej pracy. Jednak RAM nie służy tylko do przechowywania danych. Każdy program i system operacyjny zanim zostaną uruchomione, muszą najpierw zostać załadowane do RAM-u. Opłaca się to, ponieważ system może dotrzeć do informacji przechowywanych w RAM bardzo szybko. Jednak pamięć RAM jest określana jako ulotna, ponieważ wraz z odcięciem zasilania do komputera traci się jej całą zawartość. Moduły RAM różnią się od siebie pojemnością, wymiarami, kształtami, prędkościami. Moduły SIMM (Single In Line Memory Module) mają 32-bitową (36-bitową z funkcją parzystości) szerokość danych, dzielą się na dwa rodzaje: 30 - pinowe i 72 - pinowe (piny - to pozłacane pionowe złącza znajdujące się na dolnej krawędzi). Pojemności, w jakich występują to 4, 8, 16, 32, 64 oraz 128 MB. We wszystkich systemach dysponujących 64-bitową magistralą SIMM-y instalujemy parami. W postaci SIMM-ów występują pamięci FPM oraz EDO. Produkcja pamięci SIMM jest już zaprzestana (nowe chipsety obsługujące Slot 1 oraz Super 7 mają podstawki tylko pod moduły DIMM). - FPM (Fast Page Mode) - jest to zamierzchła przeszłość, pamięci tego typu były stosowane tylko w maszynach klasy 486. Czas dostępu wynosił 70 lub 60 ns. Układy te charakteryzowały się niską wydajnością. - EDO (Extended Data Output) - do niedawna najpopularniejsza pamięć w świecie PC (wykorzystywana nie tylko jako pamięć operacyjna, ale również jako pamięć kart graficznych). Produkowane były wersje o czasie dostępu 60, 50, 40, 35, 30 oraz 28 ns. Moduły DIMM (Dual In Line Memory Module) dysponują 64-bitową (72-bitową z funkcją ECC) szerokością danych, mają 168 styków. Pojemności w jakich występują to 16, 32, 64, 128 oraz 256 MB. Najczęściej spotykanym rodzajem tych pamięci są pamięci - SDRAM (Synchronous Dynamic RAM) - najpopularniejszy obecnie rodzaj pamięci stosowanej do komputerów PC (bardzo popularny również jako pamięć nowoczesnych kart graficznych SGRAM). SDRAM- y występują w wersjach o czasie dostępu 12, 10, 8 lub 6 ns, przy czym czas dostępu 8 lub 6 ns jest wymagany do poprawnej pracy z magistralą 100Mhz (tzw.
- 19. PC100 SDRAM). Najważniejszą cechą tego rodzaju pamięci jest możliwość pracy zgodnie z taktem zegara systemowego, co powoduje olbrzymi wzrost wydajności. Inną ważną cechą pamięci SDRAM jest tryb burst umożliwiający kontrolę prędkości transferu danych oraz eliminację cykli oczekiwania (wait states). W chwili obecnej możliwości pamięci SDRAM są niewystarczające (przede wszystkim - ich częstotliwość pracy). W przypadku najnowszych procesorów potrzebne są pamięci w znacznie wyższych częstotliwościach - ok. 200Mhz. Pojawiły się już pamięci RAMBUS - które mogą pracować z częstotliwością 400Mhz i osiągają transfer danych rzędu 1,6 gigabajta na sekundę, ale mają jedną zasadniczą wadę - są o ok. 45% droższe od pamięci SDRAM i wymagają specjalnie dedykowanych dla nich płyt głównych. Pamięć operacyjna podzielona jest na rozłączne segmenty. Występują tam tablice deskryptorów, a wśród nich lokalna (dane aktualnie otwartych programów) i globalna tablica deskryptorów (informacje komórek systemowych i wspólne dla wielu programów). W tablicach tych występują deskryptory, które ułatwiają znalezienia potrzebnej informacji. DYNAMICZNY RAM (DYNAMIC RAM) DRAM jest najbardziej rozpowszechnionym typem pamięci. W komputerach osobistych występuje najczęściej w postaci modułów SMII oraz wychodzących z użycia SIP-ów. Główne obszary zastosowań to: pamięć operacyjna komputerów i pamięć obrazu na kartach graficznych. Także kontrolery dysków twardych, podłączone do magistrali lokalnej VESA Local Bus albo PCI, wykorzystują popularne DRAM-y. Komórki Pamięci składają się z kondensatorów, w których pamiętana jest jedna jednostka informacji. Oznacza to, że kondensatory mogą przyjmować tylko jeden z dwóch stanów: ładowania albo rozładowywania. Duża wadą kondensatorów jest ulotność informacji, czyli utrata części ładunku po określonym czasie. Z tego powodu konieczne jest ciągłe odświeżanie (ang. refresh) zawartości. Odbywa się ono za pomocą odczytu, przy czym dotychczasowa zawartość kondensatorów zapisywana jest na nowo. Za odświeżanie, uprzedzające samo rozładowywanie się DRAM-u, odpowiedzialny jest kontroler DMA do spółki z timerem. Do poprawnej pracy kości DRAM niezbędna jest pełna przerwa między dwoma odczytami lub zapisami. Z tego powodu czas dostępu do układów typu DRAM musi być dopasowany do prędkości pracy procesora. Jednostką miary jest nanosekunda, czyli miliardowa część sekundy. Na przykład w celu uniknięcia tzw. czyli czekania (ang. wait states) procesor 486 o częstotliwości pracy 33 MHz wymaga pamięci DRAM o czasie dostępu nie większym niż 70 ns. W sytuacji gdy pamięci są zbyt wolne, konieczne jest ustawienie w BIOS-ie jednego lub więcej cykli czekania. W wyniku tego procesor, zanim uzyska dostęp do pamięci, musi chwilę odczekać. Bajt składa się z 8 bitów i składowany jest przez komputer w ośmiu kościach. Moduł DRAM zbudowany jest z reguły z dziewięciu układów, ponieważ ze względu na korekcję błędów występuje układ parzystości (ang. partity chip), niezawierający danych, lecz informacje kontrolne.
- 20. Na większości dostępnych układów SIMM (9 bitowych) spotkać można tylko trzy układy, z których każdy składa się z trzech następnych. W modułach SIMM PS/2 (36 bitowych) znajduje się na ogół więcej niż dziewięć układów, a pojemność waha się od 4 do 32 MB. Popularne DRAM-y mają następujące pojemności: 1, 4, 8 lub 16 MB. Informacja o pojemności i czasie dostępu DRAM-ów znajduje się na ogół na samych układach. Nadruk 411000-7 oznacza pojemność 1 MB i dostęp 70 ns., a 4164-12 oznacza 64 KB i 120 ns. Obrazowo mówiąc, wnętrze modułu DRAM (Dynamic Ran-dom Acces Memory) - podobnie jak arkusz kalkulacyjny czy dowolna tabela - składa się z wierszy (ang. rows) oraz kolumn (ang. columns). Aby w takiej pamięci znaleźć określoną informację, wystarczy podać jej adres, czyli kombinacje złożoną z numeru wiersza i kolumny (analogicznie jak w arkuszu kalkulacyjnym). Obszar, w którym wszystkie adresy mają ten sam numer wiersza, nosi nazwę strony (ang. page). Przed przystąpieniem do operacji odczytu lub zapisu danych system przekazuje do modułu pomięci odpowiednie adresy wierszy i kolumn. Całe adresy mogą być transmitowane poprzez jedno łącze (ang. pin), gdyż pierwszy jest zawsze przesyłany adres wiersza. W momencie gdy moduł pamięci otrzyma ów adres, wczyta wszystkie znajdujące się w tym wierszu komórki do tzw. przedwzmacniacza odczytu. Z tego miejsca układ pamięci wyszukuje następnie za pomocą adresu kolumny potrzebne dane. Po zakończeniu transmisji cała zawartość przed wzmacniacza (a więc pełny wiersz) jest z powrotem przepisywana do odpowiednich komórek. Kontrolę nad taką transmisją zapewniają dwa sygnały sterujące: RAS (Row Addres Strobe) i CAS (Comuln Addres Strobe). RAS sygnalizuje przy tym ważność adresu wiersza, natomiast CAS ważność adresu kolumny. Wartość czasu dostępu, w którym układ pamięci interpretuje sygnał RAS, jest umieszczona na obudowie każdego modułu i wynosi z reguły od 70 do 90 ns. W przypadku szybkich układów DRAM wartość ta sięga 60 ns. Ten czas dostępu nie określa jednak zbyt dokładnie wydajności danego układu DRAM. Moduł pamięci potrzebuje bowiem trochę czasu, aby przepisać ponownie z przed wzmacniacza zawartość odpowiednich komórek oraz przygotować się do kolejnej transmisji. Pełny czas transmisji dla danego układu pamięci jest, więc prawie dwukrotne dłuższy on nominalnego czasu dostępu. W szczególnym przypadku dwa kolejne odwołania do pamięci mogą dotyczyć tej samej strony danych. W tej sytuacji numer wiersza nie musi być już ponownie transmitowany, co wyraźnie skraca czas dostępu do danych. Jeśli weźmiemy jeszcze pod uwagę opóźnienia spowodowane propagacją sygnałów sterujących, to okaże się, że dla układów DRAM o czasie dostępu 70 ns. długość cyklu CAS skróci się do około 50 ns. Moduły EDO-RAM Różnica pomiędzy trakcyjnymi układami DRAM a nowymi EDO-RAM (Extended Data Out) polega na tym, że te ostatnie do- starczają poprawnych wartości danych jeszcze wtedy, gdy nie jest już dostępny sygnał CAS (niezbędny w przypadku pamięci DRAM). Dzięki takiemu rozwiązaniu kontroler pamięci może przesłać do układu adres nowej komórki danych w tym samym czasie, w którym następuje jeszcze odczyt poprzednich danych. Technika ta jest więc bardzo podobna do pi-peplingu; jedyną różnicą jest brak cyklu oczekiwania. Stało się to możliwe, gdyż układy EDO-RAM przejęły od kontrolera funkcje pamięci pośredniej. Aby moduły EDO-RAM można było umieścić na płycie głównej komputera, muszą one prawidłowo współpracować z istniejącą
- 21. konfiguracją. Nie w każdym przypadku możemy, więc w celu zwiększenia wydajności pracy komputera, zastąpić stare pamięci DRAM szybkimi modułami EDO-RAM. Nowa technika ma także i inny słaby punkt. W przypadku dwóch banków EDO-RAM nie jest możliwy dostęp typu Interleave, gdyż odwołanie do drugiego z nich nastąpiłoby już wtedy, gdy poprzednie dane byłyby jeszcze w użyciu. Mimo tych niedogodności wydajność pomięci EDO-RAM wyraźnie przewyższa możliwości tradycyjnych modułów DRAM. Dzięki nowej technice szybkość transmisji danych pomiędzy pamięcią a procesorem zwiększa się o około 20 procent. Pamięć CACHE Szybka pamięć cache zwiększa wydajność komputera, przechowując często używane dane i udostępniając je znacznie szybciej od wolniejszej pamięci DRAM. Pamięć cache pierwszego poziomu (ang. First Level Cache) znajduje się bezpośrednio w procesorach 486 i Pentium. Zarządca cache (ang. Cache Manager) zapamiętuje w nim rozkazu, które procesor będzie najprawdopodobniej potrzebował jako następne. Cache Manager jest tak pomyślany, aby CPU osiągał 90 % trafień. W ten sposób procesor podczas wykonywania np. pętli nie musi sięgać do zewnętrznej pamięci (DRAM), ale może obrabiać dane bezpośrednio w procesorze. Właśnie dzięki temu 486 jest znacznie szybszy niż 386, a wersja DX ma jeszcze zintegrowany koprocesor numeryczny. Kilka nowych rozkazów i bitów sterowania nie odgrywa w praktyce większej roli. Zintegrowany wewnętrzny cache prowadzi do niemal dwu-krotnego zwiększenia szybkości procesora, ale nie całego systemu. Pamięć cache składa się dokładnie z dwóch części: kości Tag, rodzaju spisu treści (katalogu, w którym zawarta jest informacja o tym, co znajduje się aktualnie w pamięci cache, oraz pamięci z danymi. Jeżeli procesor potrzebuje danych, to najpierw sprawdza kości Tag, czy potrzebne dane są składowane w cache. Jeżeli tak, to je odczytuje, a w przeciwnym wypadku (w drugim cyklu zegara) sięga do zewnętrznej pamięci (na płycie głównej). Ona także składa się ze statycznej pamięci RAM i ma rozmiar do 64-512 KB. Jeżeli tam również nie ma potrzebnych informacji, procesor musi sięgnąć do wolniejszej pamięci DRAM i stamtąd ściągnąć dane. Video RAM (VRAM) Czynnikiem przyczyniającym się między innymi do migotania ekranu jest to, że kości DRAM na tanich kartach graficznych nie pozwalają na równoczesny odczyt oraz zapis i wymagają ciągłego odświeżania. Trochę lepsze eliminują te ograniczenia stosując wysokowartościowe pamięci typu VRAM. Największą zaletą pamięci VRAM, jest równoczesny odczyt i zapis układów pamięci. Inaczej mówiąc, z pamięci na karcie graficznej mogą korzystać równocześnie dwa urządzenia. Jeżeli karta graficzna ma VRAM, to korzysta na budowanie obrazu: przetwornik cyfrowo- analogowy karty graficznej ściąga z pamięci informacje o budowie ekranu. W tym samym czasie koprocesor na karcie graficznej przenosi swoje dane: VRAM pozwala równocześnie czytać i pisać. Wielkość pamięci na karcie graficznej zależy od liczby kolorów i rozdzielczości ekranu. Karta VGA, która przedstawia 16 kolorów w rozdzielczości 640x480 potrzebuje 256 KB RAM-u. Dla tej samej liczby kolorów w rozdzielczości 1024x768 potrzeba już 512 KB RAM-u.
- 22. Pamięci typu ROM, EPROM i EEPROM Obok licznych wariantów pamięci RAM, które do podtrzymywania zawartości wymagają mniej lub więcej prądu, istnieją także nie ulotne pamięci, które bez dopływu prądu nie tracą zawartości i przechowują dane na stałe. Rozróżniamy 3 ich rodzaje: ROM, EPROM i EEPROM. ROM Pamięć ROM (ang. Read Only Memory - tylko do odczytu) zapisywana jest jednokrotnie, na ogół przez producenta, za pomocą specjalnego programatora. Układ nie pozwala później na jakąkolwiek zmianę zawartości. Opisany typ programowania układów nazywany jest wypalaniem, ponieważ konkretne połączenia w układzie są na ogół niszczone (przepalają się poprzez wyładowanie jak nitka w bezpieczniku). Po wykonaniu takiego zabiegu układ osiąga konkretny stan. Obszary zastosowań obejmują te dziedziny, w których dane mają pozostać bez zmian, np. BIOS klawiatury w komputerze PC, system operacyjny w drukarce, stałe pamięci w telefonach, automatyczne sekretarki. EPROM Innym wariantem jest pamięć EPROM (ang. Erasable Programmable ROM), która po około 20 minutowym naświetlaniu promieniami UV traci wszystkie informacje i pozwala się zapisać. Rozpoznawalna jest przez małe kwadratowe okienko kwarcowe na układzie. W tej pamięci zazwyczaj zapisany jest BIOS. Wypalone w ten sposób układy mogą być kasowane i programowane na nowo. W ten sposób można zaktualizować BIOS w komputerze. Również wiele kart rozszerzających, np. graficznych, modemowych i kontrolerów ma BIOS w postaci pamięci EPROM. Kasowanie i programowanie EPROM-u jest jednak czasochłonne. Układ musi zostać wyjęty z podstawki i umieszczony w specjalnym urządzeniu programującym. EEPROM Łatwiejsze w użyciu są EEPROM-y (ang. Electricaly Erasable Programmable ROM). Poprzez doprowadzenie prądu można ją kasować i programować na nowo, tzn. układy nie muszą być wyciągane z podstawek, ale mogą być kasowane i programowane bezpośrednio na karcie czy płycie głównej. Flash EEPROM-y obecne są na rynku od 1990 roku. Ich zaletą jest szybkie kasowanie (milisekundy). Starsze EEPROM-y wymagają kilku sekund. Flash EEPROM-y zdobywają coraz większe znaczenie na rynku komputerów przenośnych (notebooków) jako substytuty dysków twardych. Wiele komputerów z procesorem Pentium wyposażonych jest w BIOS-ROM właśnie w tej postaci. Użytkownik jest zatem w stanie zaktualizować swój BIOS za pomocą dyskietki dostarczonej od producenta poprzez oprogramowanie, które dokonuje zapisu nowych danych do układu. Innym obszarem zastosowań są karty sieciowe, które muszą przechowywać swoje parametry niezależnie od dopływu prądu. Karta graficzna Karta graficzna jest najważniejszą kartą rozszerzeń. Montuje się ją w jednym ze slotów na płycie głównej. Odpowiada ona za otrzymanie obrazu na monitorze.
- 23. Zmienia ona sygnały przetwarzane przez procesor na format, który może być wyświetlany przez monitor. Najmniejszą jednostką wykorzystywaną przez kartę graficzną do wytworzenia obrazu jest piksel. O ile karta nie jest wyposażona we własny procesor, każdy piksel (oznaczający jeden punkt obrazu) jest obliczany przez procesor komputera. Im więcej kolorów zawiera dany obraz, tym większa ilość pamięci jest potrzebna do jego wyświetlania. Każdy obraz utworzony przez procesor jest umieszczany w pamięci karty graficznej w postaci mapy bitowej. Specjalny konwerter cyfrowo-analogowy (RAMDAC) przekształca następnie taką cyfrową informacje na odpowiednie impulsy elektryczne, które później przesyła do monitora. Pierwszymi sterownikami graficznymi stosowanymi do współpracy z mikrokomputerami były tzw. karty MDA (Monochrome Display Adapter) pozwalający emitować na ekranie monitora obraz jednobarwny. Adapter ten był klasycznym adapterem znakowym pozwalającym obrazować znaki alfanumeryczne i część znaków graficznych o kodach z zakresu od 169 do 223. Jako sygnały wejściowe w sterownikach tych stosowano sygnały charakterystyczne dla techniki TTL, stąd często monitory sterowane takimi kartami nazywano monitorami TTL. Obraz w tych monitorach po-siadał rozdzielczość 720x350 (720 pikseli w poziomie i 320 w pionie). Stosowano matryce znakową 9x12, co pozwalało budować obraz zawierający 80 kolumn i 25 wierszy znaków. Obecnie stosowane karty potrafią pracować w wysokich rozdzielczościach przy bardzo dużej liczbie kolorów. Ostatnio stosowane typy kart graficznych to: VGA - (Video Graphics Card), najbardziej rozpowszechniony standard graficzny, dający przyzwoitą rozdzielczość 640 × 480 punktów. Ulepszone wersje VGA oferują lepsze zdolności rozdzielcze 800 × 600 i wyższe (zwane SuperVGA). SVGA - aktualnie najszerzej stosowany standard. Karty graficzne SVGA można podzielić na: ISA, Local Bus, PCI i AGP, jest to podział ze względu na budowę złącza. Aby wyświetlić wyniki przetwarzania danych, komputer, oprócz monitora, musi mieć jeszcze właśnie kartę graficzną, która jest odpowiedzialna za prostą, dwuwymiarową grafikę w Windows oraz skomplikowaną grafikę w grach, programach graficznych i animacjach. Dziś funkcje 2D i 3D zostały zintegrowane w jednym procesie graficznym w kartach nowej generacji. Mają one wiele dodatków, różnego rodzaju dopalacze graficzne, tunery TV i dekodery. Obecnie podstawowym kryterium powinien być standard szyny karty: PCI lub AGP. PCI jest bardzo popularnym i szybkim standardem w większości kart (białe gniazda). AGP z kolei jest portem zaprojektowanym wyłącznie do kart graficznych w taki sposób, aby umieszczone w nim karty osiągały najlepsze wyniki. Ich zastosowanie z pozoru nie daje dużego wzrostu wydajności - do operacji 2D, a nawet wyświetlania obiektów 3D z powodzeniem nadaje się szyna PCI. Dopiero w momencie, gdy scena trójwymiarowa jest skomplikowana, a programiści zadbali o dużą liczę obiektów i wykorzystali wiele tekstur, na dodatek wysokiej rozdzielczości, wówczas przepustowość PCI przestaje wystarczać. Dzięki specjalnym rozwiązaniom, karta AGP powinna znacznie przyspieszyć
- 24. wykonywanie operacji graficznych w takich sytuacjach. Niestety nie da się zainstalować karty PCI w porcie AGP, ani karty AGP w porcie PCI. Płyta główna musi być zaopatrzona w osobny port AGP (jedyne podłużne gniazdo na płycie wyglądające podobnie jak PCI, ale dalej odsunięte od krawędzi płyty). Nie należy już raczej stosować starych kart ISA i Local Lus, gdyż są to bardzo stare i nie stosowane obecnie standardy. Karta graficzna ma decydujące znaczenie, co do jakości wyświetlanego obrazu na ekranie monitora. Jeśli pracujemy tylko z aplikacjami biurowymi, takimi jak edytor tekstu czy arkusz kalkulacyjny, to wystarczy nam karta PCI z 1 lub 2 MB pamięci VRAM. Jeśli jednak mamy do czynienia z aplikacjami graficznymi to powinniśmy mieć kartę PCI lub AGP z co najmniej 4 MB pamięci VRAM (im więcej tym lepiej) zdolną wyświetlić dużą rozdzielczość przy dużej liczbie kolorów. Dobry obraz charakteryzuje się odpowiednią rozdzielczością, ilością kolorów, ostrością, żywymi barwami i brakiem migotania. Maksymalna rozdzielczość karty decyduje o ilości możliwych do wyświetlenia kolorów przy określonej rozdzielczości monitora. W przypadku monitora 15 calowego jest to najczęściej 800x600, 17 calowego 1024x768, 19 calowego 1280x1200 a 21 calowego 1600x1200. Obraz w reprezentacji 17 milionów kolorów uważany jest za obraz o jakości fotograficznej. Jeśli więc chcesz mieć realistyczny obraz, sprawdź czy posiadana przez ciebie karta jest w stanie wyświetlić obraz z daną ilością kolorów przy wybranej rozdzielczości, zachowując częstotliwość odświeżania co najmniej 75 Hz. OTO KILKA KART GRAFICZNYCH DOSTĘPNYCH NA RYNKU: SiS 305 32MB PCI - jest to niedroga karta z chipsetem SiS 305, pamięci 32 MB złączem PCI i wyjściem D-Sub. Chłodzenie przez radiator. Radeon 9000 Pro 64MB DVI + tv out Jest to karta z chipsetem Radeon 9000 ATI. Pamięć 64 MB DDR (128bit) Układ Chip Rage Theater odpowiedzialny za obsługę wyjścia tv zastąpiony został w tej karcie przez zintegrowaną w procesorze RV250 jednostkę obsługującą wyjście TV do rozdzielczości 1024x768, oraz funkcje Fullstream ( sprzętowe filtrowanie podnoszące jakość obrazu) i funkcje Video Immersion II. Ponadto nowy procesor ma podwójny zintegrowany 400MHz-owy RAMDAC, oraz zintegrowany 165 MHz- owy transmitter DVI. Karta ma wyjścia Video, DVI, D-Sub. Chłodzona wentylatorem. GeForceFX 5800 Gainward Ultra/800 Plus GS - jest to karta z najwyższej półki z chipseten NVIDIA GeForceFX5800. Ma niesamowite własności w zakresie jakości wizualizacji w grach i aplikacjach graficznych. Oparta na procesorze NVIDIA NV30 ma nowy, trzeciej generacji silnik (CineFX). Zawiera dwa przetworniki RAMDAC o częstotliwości pracy 400MHz i pamięć 128
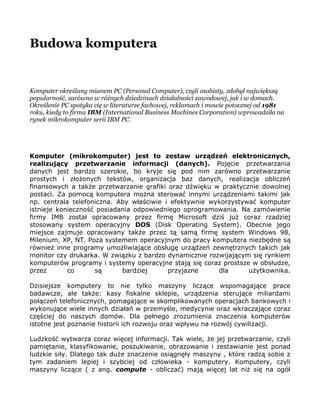
- 25. Dysk twardy - HDD Programy komputerowe stają się coraz nowocześniejsze, a tym samym potrzebują więcej miejsca na dysku twardym. Praktycznie każdy program przeznaczony do poważniejszych zastosowań wymaga instalacji na dysku twardym. Modele dysków twardych są o wymiarach 5,25 lub 3,5 (częściej spotykane), a więc niewielkie wymiarowo, co pozwala umieścić je w małym pudełku zwanym wraz z zespołem głowic odczytująco–zapisujących: napędem. Tradycyjnie, dysk twardy montuje się przy przedniej ściance wewnątrz obudowy komputera. Obecnie, dzięki małym gabarytom, można go umieszczać w specjalnej obudowie, która umożliwia szybkie przenoszenie z jednego komputera do innego. Taki dysk jest bardzo łatwy w montażu, gdyż wsuwa się go w odpowiednie miejsce w przedniej ściance komputera zwane kieszenią. Na przedniej ściance komputera znajduje się dioda sygnalizująca prace dysku. Dyski twarde składają się z kilku tarcz magnetycznych o dwóch powierzchniach każda. Każdej powierzchni odpowiada jedna głowica zapisująco-odczytująca z mechanizmem umożliwiającym precyzyjne wyszukiwanie na powierzchni dysku potrzebnych sektorów. Powierzchnie tarcz podzielone są na ścieżki, które składają się z sektorów popularnie zwanych cylindrami. Powierzchnie tarcz mają delikatną warstwę magnetyczną. Silnik liniowy porusza tarcze z dużą prędkością, a precyzyjny serwomechanizm reguluje ustawienie ramion głowic, wstrzymując głowice w odległości zaledwie kilku mikronów od powierzchni nośnika danych. Głowice nie mogą dotykać powierzchni nośnika, gdyż przy tych prędkościach mogłyby porysować delikatną warstwę magnetyczną. Każdy twardy dysk ma płytkę z układami elektronicznymi i odpowiednimi interfejsami, a kontroler steruje napędem dysku. Pracując w oparciu o technikę dedicated servo, czyli jedna płaszczyzna dysku poświęcona jest całkowicie do przechowywania oznaczeń indeksowych sterujących płynnym pozycjonowaniem głowic napędu i dlatego dysk ma nieparzystą liczbę głowic zapisująco-odczytujących. Miniaturowy system operacyjny Firmware zapisany w pamięci ROM, koduje i dekoduje poszczególne dane a zawarte w nim procedury korygują błędy powstałe przy odczycie danych z dysku. Po wyłączeniu zasilania, automatyczny mechanizm za pomocą specjalnej sprężyny odciąga głowice na bezpieczną ścieżkę tarczy magnetycznej, gdzie zostają zaparkowane co zapobiega przypadkowemu uszkodzeniu zapisanej powierzchni dysku. Dyski twarde mające standardowy interfejs IDE (Intergrated Drive Electronics - scalony sterownik elektroniczny) są kompatybilne w stosunku do starszych wersji, mają zwiększone możliwości transmisji danych oraz możliwość dołączenia dodatkowego urządzenia np. CD-ROM-u z mechanizmem P I/O (Program In-put/Output). Transmisja danych odbywa się z szybkością nawet 10 MB/s. Local Block Adressing (LBA) dzieli dysk na bloki logiczne i w ten sposób adresuje dane, co umożliwia osiągnąć nawet 7,8 GB pojemności. Taki dysk musi być wspomagany przez hardware i BIOS, który zamienia bloki logiczne na tradycyjne parametry, czyli na ścieżki, cylindry, sektory. BUDOWA DYSKU TWARDEGO:
- 26. 1 - Kontroler - w napędach EIDE i SCSI jest częścią samego napędu. Kontroluje silniczki sterujące głowicą i zamienia impulsy elektryczne na dane cyfrowe procesora. 2 - Obudowa - aby wyeliminować zagrożenie wewnętrznego zanieczyszczenia, ciśnienie powietrza jest wyrównywane przez specjalne filtry, a wnętrze obudowy jest szczelnie oddzielone od świata zewnętrznego. 3 - Talerze - to mocne metalowe lub szklane dyski, pokryte magnetycznym materiałem o grubości mniejszej niż 0,001 mikrometra. 4 - Głowice zapisu/odczytu - umieszczone na końcu ramion po jednej głowicy na każdą stronę talerza. Ramię może przesuwać głowicę w każde miejsce powierzchni dysku. 5 - Oś - na której zamontowane są dyski. 6 - Dane - czyli umieszczone na talerzach sekwencje zer i jedynek. Dysk twardy wiruje z prędkością 3600 standardem jest już 7200, a obecnie nawet 10000 obrotów na minutę, prawie w próżni, ale gazu (resztek powietrza) wystarcza na tyle, by poduszka powietrzna unosiła nieco głowicę magnetyczną służącą do odczytu i zapisu. Na powierzchni dysku znajduje się trochę smaru by jej nie uszkodzić przy opadnięciu głowic po wyłączeniu zasilania. Głowic jest zwykle 4 do 8 (spotyka się też 12 i więcej). Para głowic przypada na jedną płytkę magnetyczną, a płytek takich może być w jednej obudowie kilka. Okręgi na powierzchniach magnetycznych tworzą ścieżki (tracks). Wszystkie ścieżki znajdujące się pod sobą na płytkach magnetycznych, czyli powierzchnia magnetyczna znajdująca się na pionowym przekroju całego dysku, tworzy cylinder. WYDAJNOŚĆ DYSKU TWARDEGO: Na wydajność tego urządzenia wpływa kilka kryteriów: 1 – Rodzaj zastosowanego interfejsu: IDE (Intelligent Drive Electronics) - przestarzały i rzadko używany. Złącza IDE nie mogły obsługiwać napędów CD-ROM, DVD i nagrywarek CD-RW oraz miaały barierę do 528 MB. EIDE - najczęściej używany, tani, łatwy w instalacji. SCSI - bardzo szybki, drogi, wymagają specjalnego kontrolera (host-adaptera). 2 – Średnia prędkość transmisji danych: - PIO-4, DMA 2, Ultra DMA 3 i inne. 3 – Liczba obrotów na minutę - czyli szybkość, z jaką wirują talerze twardego dysku, przeciętnie 3600, 5400, 7200 a ostatnio nawet 10 000 rpm. Większa szybkość oznacza wyższy transfer
- 27. danych, ale nie musi zawsze jednoznacznie decydować o możliwościach poszczególnych urządzeń - prędkość odczytu z wirującego szybciej nośnika o mniejszej gęstości upakowania informacji może być mniejsza niż w przypadku wolniejszego napędu z bardziej efektywnie wykorzystaną powierzchnią talerzy. Do uzyskania większych prędkości konieczne są wydajniejsze silniki, trwalsze elementy mechaniczne (talerze, łożyska) oraz bardziej precyzyjne głowice. 4 – Pojemność - czyli ilość wolnego miejsca na dysku mierzona najczęściej w Gigabajtach. Obserwowany obecnie dynamiczny wzrost pojemności dysków twardych realizowany jest najczęściej poprzez dodawanie kolejnych talerzy. Powoduje to jednak zwiększenie wymiarów oraz ciężaru urządzenia, a także zauważalnie wpływa na jego zapotrzebowanie w energię elektryczną. 5 – Pamięć podręczna dysku (cache, przeciętnie od 128 KB do 2 MB i więcej). Jej obecność jest niezbędna do prawidłowego funkcjonowania napędu, kopiowane są do niej np. odczytane z nośnika dane, które następnie są przesyłane do kontrolera w komputerze. Cache może być także wykorzystywany podczas komunikacji w drugą stronę. Przesłane do zapisania informacje umieszczane są najpierw w schowku, skąd - po odnalezieniu wolnego miejsca na dysku i odpowiednim ustawieniu głowic - przepisywane na talerze. Zapisywanie danych za pośrednictwem pamięci podręcznej niesie jednak również pewne niebezpieczeństwo, nagły zanik zasilania, który nastąpi przed skopiowaniem danych z pamięci podręcznej na nośnik, może spowodować ich bezpowrotną utratę. 6 – Ciągły transfer danych - parametr ten określa ilość danych, jaką dysk twardy może w sposób ciągły odczytywać bądź zapisywać. Wielkość transferu podajemy w kilobajtach na sekundę. Wysoka wartość tego parametru jest istotna np. podczas nagrywania własnych płyt CD-R bądź obróbce plików video. 7 - Czas odczytu oraz czas zapisu Czas odczytu związany z oczekiwaniem na odnalezienie potrzebnych informacji na nośniku. Parametr ten jest szczególnie istotny w przypadku aplikacji bazodanowych, korzystających z dużych zestawów danych, nierzadko porozrzucanych po całej powierzchni nośnika. Im krótszy czas dostępu urządzenia, tym szybciej radzi sobie ono z odszukiwaniem danych. 8 - S.M.A.R.T. - monitorowanie pracy i automatyczne powiadamianie o ewentualnych błędach. OTO PRZYKŁADOWE DYSKI TWARDE: Seagate Barracuda 7200.7: Jest to dysk twardy którego prędkość obrotowa osiąga 7200 obr/min, pojemność 60 GB i pamięć 2048 kb. Rewolucyjna technologia SoftSonic Fluid Dynamic Bearing (FDB) jest to technologia zastosowania w silniku tego dysku łożyska FDB powoduje to, że ten superszybki dysk jest bezgłośny. Barracuda 7200 jest
- 28. kolejnym dyskiem twardym dla komputerów biurkowych, w którym zastosowano ten typ napędu - ta technologia umożliwi również wzrost gęstości upakowania danych na jednym talerzu oraz przyspieszenie prędkości obrotowej dysków. Napęd przełamuje kolejną barierę transferu wewnętrznego - 683 Mbps - jest na tyle szybki żeby przekopiować godzinę muzyki w formacie MP3 w ciągu niespełna sekundy!! transfer zewnętrzny (zapis) wynosi 58 MB/s a transfer zewnętrzny (odczyt) 100 MB/s Nowy dysk jest na tyle szybki, by wyświetlać dane strumieniowe 8 filmów jednocześnie (jakość DVD) nawet bez utraty jednej klatki filmu! Barracudy wytwarzają hałas o natężeniu poniżej 25 dBA, podczas gdy człowiek jest w stanie usłyszeć dźwięki o sile powyżej 25 dBA. Niezawodność tego dysku (MTBF) 500000 godzin, format szerokości 3.5 cala waga 544g. Western Digital Raptor 36,7 GB WD360GD Serial ATA To pierwszy na rynku dysk w standardzie Serial ATA, z prędkością obrotową talerzy 10000 obr/min, współczynnikiem MTBF 1200000 godzin oraz imponującym średnim czasem wyszukiwania 5,2 ms. Pojemność WD360GD to 36.7 GB, a wielkość pamięci cache 8 MB. Raptor jest obecnie najszybszym dyskiem na świecie. Na dyski te producent udziela 5 letniej gwarancji. Mimo że jest on dyskiem w standardzie ATA ma dodatkowe klasyczne gniazdo zasilania, umożliwiające podpięcie zwykłej wtyczki 12V z zasilacza ATX, ma on łożyska kulkowe i jego głośność w czasie pracy wynosi 32 dBA. Western Digital Caviar SE 200 GB WD2000JB 8MB cache Rodzina Caviar XL otwiera nową linię twardych dysków z interfejsem ATA/100. Urządzenie z nowych serii mają prędkość obrotową 7200 obr/min. Specjalna edycja tych dysków ma 8192 kb cache Pojemność tego dysku to 200 GB ma on trzy talerze. Stacja dysków elastycznych - FDD Najstarszymi, aczkolwiek wykorzystywanymi do dzisiaj, masowymi pamięciami zewnętrznymi są pamięci dyskietkowe. Podstawową zaletą pamięci dyskietkowych jest ciągle prostota wymienialności nośnika (dyskietki). Należy zauważyć, że obecnie dyskietka jest coraz rzadziej używana, ponieważ ma bardzo małą pojemność. Z tego powodu obecnie stosuje się pamięci dyskietkowe prawie wyłącznie do przenoszenia plików o małej pojemności (np. tekstowych) pomiędzy komputerami. Dyskietka jest praktycznie niezbędna, jeżeli np. sformatowaliśmy dysk twardy i nie ma na nim systemu. Wtedy system uruchamiamy z dyskietki. Obecnie w powszechnym zastosowaniu znajdują się dyskietki 3,5 cala. Dyskietka 5,25 cala wyszła już całkowicie z użytku. Dyskietki zbudowane są z krążka, na którego powierzchnię naniesiony jest materiał ferromagnetyczny. W dyskietce 5,25” krążek ten ma centryczny otwór i opakowany jest w kopertę z sztucznego wyściełaną po stronie wewnętrznej miękkim materiałem. W kopercie wykonane jest kilka obustronnych wycięć. Podstawowe - centryczne umożliwia zaciśnięcie sprzęgła napędu dyskietki na krążku z nośnikiem. Nie mniej ważne - podłużne, wykonane promieniowo, umożliwia dostęp głowic stacji do zapisu / odczytu
- 29. danych. Ponadto w pewnej odległości od osi obrotu znajduje się pojedynczy otwór (taki sam jest na krążku z nośnikiem) służący do synchronizacji prędkości obrotowej krążka. Na prawej krawędzi koperty znajduje się prostokątne wycięcie (w obszarze poza krążkiem z nośnikiem) służące do zabezpieczenia dyskietki przed zapisem poprzez zaklejenie tego wycięcia. Dyskietka 3,5 cala ma podobną konstrukcje, przy czym krążek z nośnikiem wykonany jest z trwalszego materiału i wyposażony jest w metalową, centryczną wkładkę przenoszącą napęd. Wkładka ta ma owalny otwór, w który wsuwa się kołek sprzęgła. Powoduje to bardziej trwałe połączenie krążka z elementami napędowymi i nie wymaga synchronizacji optycznej. Krążek z nośnikiem obudowany jest w twarde, plastikowe opakowanie. Szczelina umożliwiająca kontakt głowicy z nośnikiem jest zakryta specjalną, metalową zasuwką ze sprężyną zamykającą dostęp do szczeliny w czasie, w którym dyskietka znajduje się poza stacją. Dyskietka 3,5” ma także szczelinę zabezpieczającą przed zapisem danych. Szczelina ta wyposażona jest fabrycznie w przesuwaną przysłonę, która zabezpiecza zapis w stanie odsłoniętym. Różnice w konstrukcji obu rodzajów dyskietek są na tyle istotne, że dyskietki 3,5 są zdecydowanie trwalsze i bezpieczniejsze w użytkowaniu niż dyskietki 5,25”. Dla współpracy z każdym z omawianych typów dyskietek wykorzystywane są inne stacje - dyskietki 5,25” pracują w stacjach 5,25 cala a dyskietki 3,5” w stacjach 3,5 cala. Spotyka się kilka typów napędów dysków elastycznych. Dla dyskietek 5,25” (już praktycznie nieużywane) mają pojemność 1,2 MB, zapisują i odczytują też dyskietki o pojemności 360 KB Dla dyskietek 3,5” cały czas stosowana pojemność 1,44 MB. Stacje o pojemności 1,44 MB mają możliwość odczytu i zapisu na dyskietkach o pojemności 720 KB. Stacja podłączona jest do zasilacza podającego napięcia niezbędne do zasilania silników i elektroniki. Poza tym, stacja podłączona jest do sterownika dyskietek umieszczonego na płycie głównej. Obecnie odpowiednią konfigurację stacji uzyskuje się przez właściwe włączenie do przewodu paskowego łączącego stację z kontrolerem (stacja A - dwa wtyki na końcu przewodu po tzw. przewijce, stacja B - dwa wtyki w środkowej części przewodu). Stacja dyskietkowa wyposażona jest także w LED informujący o stanie jej aktywności (zapis/odczyt). Silnik obracający dyskietkę jest włączany w chwili, w której system operacyjny chce uzyskać dostęp do stacji (zapisać/odczytać dane). Z tego powodu, zapis/odczyt możliwy jest dopiero po odpowiednim rozpędzeniu krążka nośnikiem, kontrolowanym przez układy synchronizacji. Po wykonaniu operacji zapisu/odczytu stacja napędza jeszcze krążek przez pewien czas (odmierzany przerwaniem IRQ 0), po czym silnik ulega wyłączeniu. Ten tryb pracy stacji, oraz niewielka prędkość obrotowa krążka z nośnikiem powodują, że średni czas dostępu do danych zgromadzonych na dyskietkach wynosi 300 ms. Stacja dyskietkowa 3,5” jest wymiarowo mniejsza od 5,25”. Na przedniej ściance ma szczelinę do wsuwania dyskietek (szczelina jest z klapką), rygiel - przycisk wysuwający dyskietkę z napędu i diodę sygnalizującą jej pracę (zapis/odczyt danych). Stacja zamyka się samodzielnie. W chwili zamknięcia stacji następuje odsunięcie przysłony zabezpieczającej dostęp do szczeliny, w której pracują głowice. Stacja ta nie wymaga synchronizacji optycznej, gdyż napęd sprzężony jest na sztywno z krążkiem i aktualne położenie
- 30. krążka jest określane na podstawie aktualnego położenia napędu (nie występują drobne poślizgi dyskietki możliwe w stacjach 5,25”). ZASADA DZIAŁANIA: Zapis dokonywany jest po obu stronach dyskietki na współśrodkowych okręgach nazywanych ścieżkami, podzielonych na sektory po 512 B każdy. W przypadku dyskietki o średnicy 3,5'' informacja zapisywana jest dwustronnie na 80 ścieżkach po 18 sektorów. Pojemność dyskietki wynosi, więc:2*80*18*512B=1474560 B, a po przeliczeniu na MB: 1474560/1024=1,44 MB. Na każdej ścieżce zapisywane jest 9216B (18 sektorów po 512 B) Ścieżka zewnętrzna ma długość ok. 250 mm (promień R=40mm), czyli 1B zapisany jest na wycinku koła o długości ok.. 0,027 mm, a jeden bit odpowiednio: 0,0035 mm przy szerokości ścieżki ok..0,2 mm. Dyskietka obraca się z prędkością 360 obr/min (6 obr/sek.). Głowice zapisująco- odczytujące przesuwają się wzdłuż promienia dyskietki. Prąd elektryczny doprowadzony do uzwojenia głowicy wytwarza w pobliżu szczeliny głowicy pole magnetyczne namagnesowujące fragment dyskietki znajdujący się pod głowicą. Na rynku znajdują się napędy kilku firm, nie ma między nimi większych różnic. Najtańsze są napędy firm Samsung, Panasonic, Mitsumi i NE, droższe i trochę lepsze (mała różnica) firmy TEAC. Firma TEAC wypuściła na rynek także napęd 3.5 o pojemności 2.88 MB. Do tego napędu jest sprzedawany odrębny sterownik, standardowy, obsługujący poprzednie napędy, niestety się nie nadaje. Nowy sterownik poza obsługą dwóch napędów 2.88 MB, może również obsługiwać dwa tradycyjne napędy (razem jednocześnie cztery napędy dysków elastycznych). Kontroler FDC (Floppy Disk Controler) umożliwiający zamontowanie i używanie stacji dyskietek (najwyżej dwóch), montowany jest w gnieździe na płycie głównej. Połączony jest z napędem kablem 34-żyłowym. Zasilanie podawane jest do napędu jednym z kabli, wystających z zasilacza zamontowanego w obudowie. Przy czym stacja 3.5 zasilana jest kablem o małym, wtyku, tak ukształtowanym, by nie można było podłączyć go odwrotnie. Stacja 5.25 (starsze modele) jest podłączana poprzez kabel takim samym wtykiem jak stacja dysków i CD-ROM. Napęd CD-ROM Płyta kompaktowa jest obecnie najczęściej stosowaną formą przenoszenia danych. Ma ona dużą pojemność, dlatego bez problemu mieszczą się na niej różne instalacje, czy zajmujące obecnie duże pojemności systemy operacyjne. CD-ROM działa na bardzo podobnej zasadzie jak tradycyjna płyta gramofonowa: dane są zapisane na spiralnej ścieżce, jednakże tylko po jednej stronie dysku. Druga różnica pomiędzy płytą kompaktową a gramofonową polega na tym, że dane odczytywane i zapisywane są od środka dysku na zewnątrz. Gęstość danych na takiej sześciokilometrowej ścieżce jest stała i do jej odczytu wystarczy zwykły napęd CD-ROM z jego prędkością 1,3 MB/
- 31. s. Ponieważ długość zwoju spirali wewnątrz - czyli na początku dysku - jest o wiele mniejsza niż na jego obrzeżu, konieczne staje się takie dopasowanie prędkości obrotowej, aby ilość danych odczytywanych w jednostce czasu była stała. Podczas gdy na zewnętrznej ścieżce do odczytu wystarcza 200 obrotów na minutę, w przypadku ścieżek wewnętrznych koniecznych jest już 500 obrotów. Audio CD nie ma z tym żadnych problemów, gdyż utwory muzyczne są dość długie, zajmują pokaźną część dysku, a jego prędkość obrotowa jest modyfikowana w sposób ciągły. Dopiero zmiana ścieżki wymaga nagłego przeskoku i powoduje krótką lecz zauważalną przerwę trwającą około 300 ms. W przypadku CD-ROM-u wspomniana wyżej przerwa - konieczna do ustawienia prędkości - jest odpowiedzialna za długi czas dostępu do danych. Podczas każdego odczytu danych znajdujących się w różnych miejscach dysku, przymusowa pauza długości 1/3 sekundy jest nie do uniknięcia. Dotyczy to także napędów o zwielokrotnionych prędkościach obrotowych. Kwestia przedstawia się inaczej, kiedy do pamięci roboczej komputera mają zastać wczytane dane o pokaźnej objętości, przechowywane na dysku w jednym miejscu, czyli po prostu duże pliki. Przy standardowej częstotliwości próbkowania, zdefiniowanej w specyfikacji Red Book, dysk pokonuje w sekundę 1,3 metra. W tym czasie zostaje odczytanych 75 sektorów. Każdy sektor podzielony jest na 98 ramek (ang. Frames), z których każda składa się z 24 bajtów danych i kilku bajtów kontrolnych, służących do korekcji błędów i synchronizacji. Po ominięciu w obliczeniach bajtów kontrolnych i synchronizacyjnych pozostaje jeszcze około 2 KB danych na sektor, co w sumie daje odczyt danych z prędkością 150 KB/s. Oczywiście taka ilość informacji może zostać przekazana do pamięci operacyjnej tylko wtedy, gdy nie powstają żadne zatory z winy czytnika lub kontrolera. Szybkość transferu danych 150 KB/s stała się graniczną określającą minimalne wymagania stawiane napędowi dedykowanemu aplikacjom multimedialnym. Zostały one zdefiniowane w standardzie multimedialnego komputera osobistego w skrócie MPC (Multimedia PC). Zbyt wolna prędkość odczytu daje się we znaki podczas próby odtworzenia z CD-ROM-u prostego filmu zapisanego w formacie AVI. Wyraźnie przeskakujący film, wyświetlany w okienku o rozmiarach znaczka pocztowego, mówi sam za siebie. W takich przypadkach niezbędna jest technika multispeed. Wraz ze wzrostem prędkości odczytu rośnie również - do 300,450,600 KB/s itd. przepustowość danych. Przy wykorzystaniu tej technologii filmy dają się odtwarzać o wiele płynniej. Zysk czasowy przy stosowaniu szybszych napędów widać wyraźnie, także przy ładowaniu obrazów z dysków Photo CD, na których obrazy te z reguły pamiętane są w jednym dużym pliku. Poza tym technologia multispeed pozwala na zaoszczędzenie wielu megabajtów na dysku twardym, ponieważ umożliwia szybkie doładowywanie danych z CD-ROM-u. Podstawą działania dysków optycznych jest komplet: oświetlacz laserowy i dioda światłoczuła. Oświetlacz laserowy wytwarza wąską wiązkę światła spójnego padającą