Sistema de detecção de obstáculos
•
0 gostou•152 visualizações

O documento descreve um sistema de detecção de obstáculos para deficientes visuais usando sensores sonar e motores de vibração. Sensores nas pernas e cabeça detectam objetos e motores na cintura vibram com frequências diferentes dependendo da distância dos objetos para alertar o usuário. O objetivo é proporcionar mais facilidade de locomoção para deficientes visuais.

Recomendados
Mais conteúdo relacionado
Destaque
Destaque (15)
Sistema de detecção de obstáculos
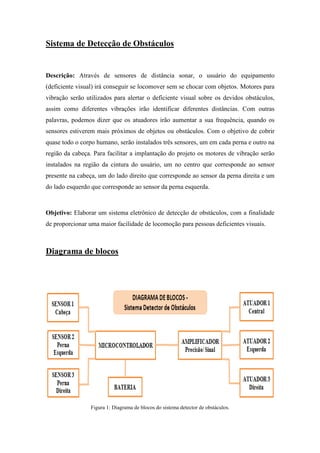
- 1. Sistema de Detecção de Obstáculos Descrição: Através de sensores de distância sonar, o usuário do equipamento (deficiente visual) irá conseguir se locomover sem se chocar com objetos. Motores para vibração serão utilizados para alertar o deficiente visual sobre os devidos obstáculos, assim como diferentes vibrações irão identificar diferentes distâncias. Com outras palavras, podemos dizer que os atuadores irão aumentar a sua frequência, quando os sensores estiverem mais próximos de objetos ou obstáculos. Com o objetivo de cobrir quase todo o corpo humano, serão instalados três sensores, um em cada perna e outro na região da cabeça. Para facilitar a implantação do projeto os motores de vibração serão instalados na região da cintura do usuário, um no centro que corresponde ao sensor presente na cabeça, um do lado direito que corresponde ao sensor da perna direita e um do lado esquerdo que corresponde ao sensor da perna esquerda. Objetivo: Elaborar um sistema eletrônico de detecção de obstáculos, com a finalidade de proporcionar uma maior facilidade de locomoção para pessoas deficientes visuais. Diagrama de blocos Figura 1: Diagrama de blocos do sistema detector de obstáculos.
- 2. Esquemático dos Posicionamentos dos sensores Esse esquemático consta em ilustrar o posicionamento dos sensores e atuadores do nosso projeto, onde teremos sensores nas pernas, na cabeça e três atuadores posicionados na cintura do deficiente visual. Figura 2: Posicionamento dos sensores e atuadores.